 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Approach for Autonomous Volumetric Exploration of Large Scale Environments under Severe Odometry Drift
Paper and Code
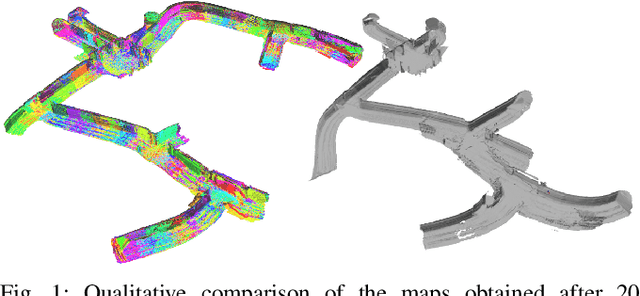
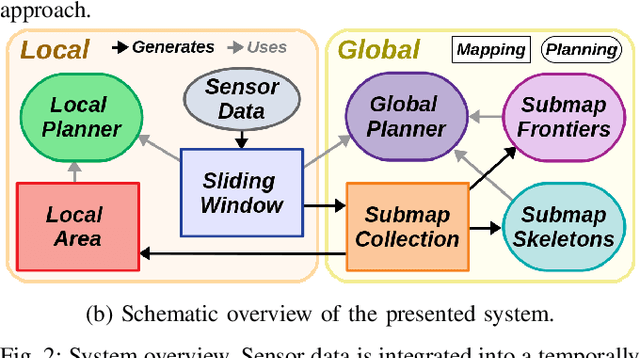


Exploration is a fundamental problem in robot autonomy. A major limitation, however, is that during exploration robots oftentimes have to rely on on-board systems alone for state estimation, accumulating significant drift over time in large environments. Drift can be detrimental to robot safety and exploration performance. In this work, a submap-based, multi-layer approach for both mapping and planning is proposed to enable safe and efficient volumetric exploration of large scale environments despite odometry drift. The central idea of our approach combines local (temporally and spatially) and global mapping to guarantee safety and efficiency. Similarly, our planning approach leverages the presented map to compute global volumetric frontiers in a changing global map and utilizes the nature of exploration dealing with partial information for efficient local and global planning. The presented system is thoroughly evaluated and shown to outperform state of the art methods even under drift-free conditions. Our system, termed GLoca}, will be made available open source.