 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaritime Vessel Tank Inspection using Aerial Robots: Experience from the field and dataset release
Apr 29, 2024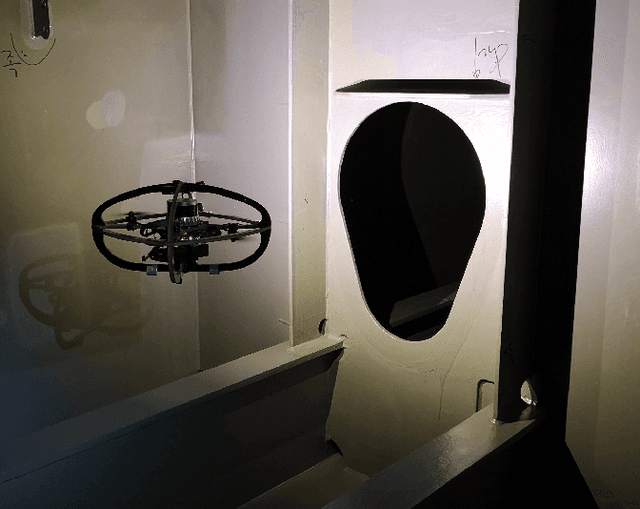
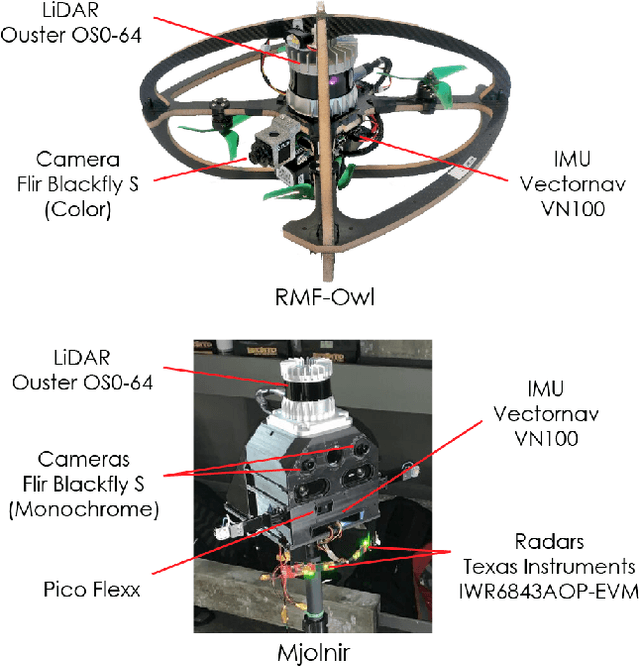
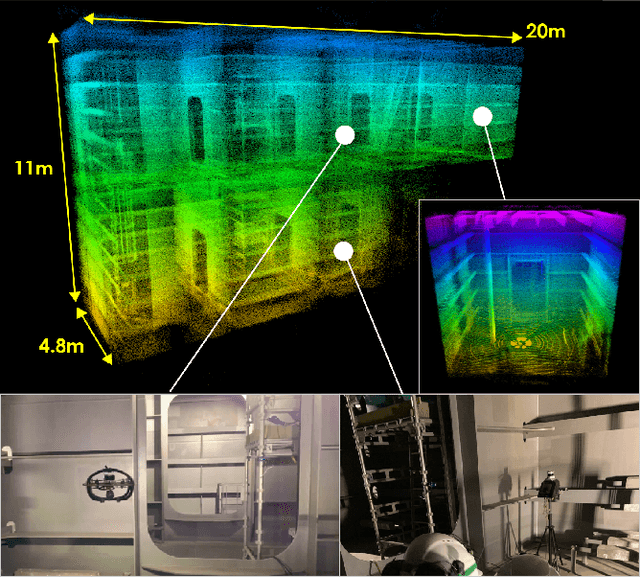
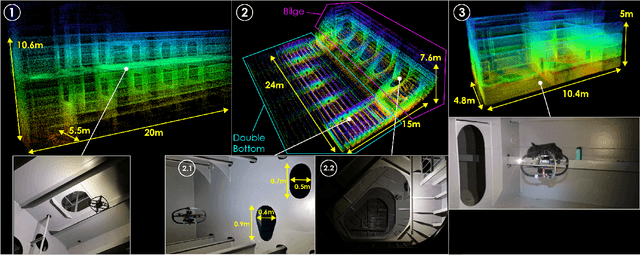
This paper presents field results and lessons learned from the deployment of aerial robots inside ship ballast tanks. Vessel tanks including ballast tanks and cargo holds present dark, dusty environments having simultaneously very narrow openings and wide open spaces that create several challenges for autonomous navigation and inspection operations. We present a system for vessel tank inspection using an aerial robot along with its autonomy modules. We show the results of autonomous exploration and visual inspection in 3 ships spanning across 7 distinct types of sections of the ballast tanks. Additionally, we comment on the lessons learned from the field and possible directions for future work. Finally, we release a dataset consisting of the data from these missions along with data collected with a handheld sensor stick.
Autonomous Exploration and General Visual Inspection of Ship Ballast Water Tanks using Aerial Robots
Nov 07, 2023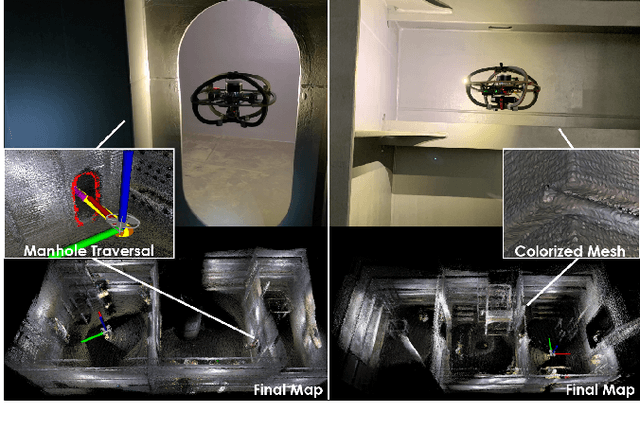
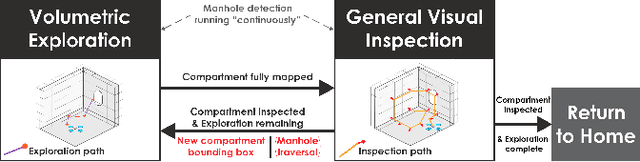
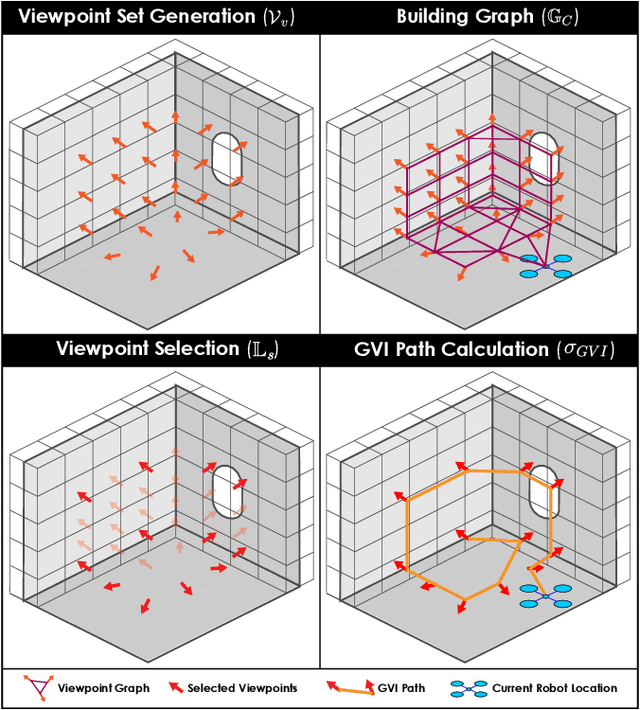
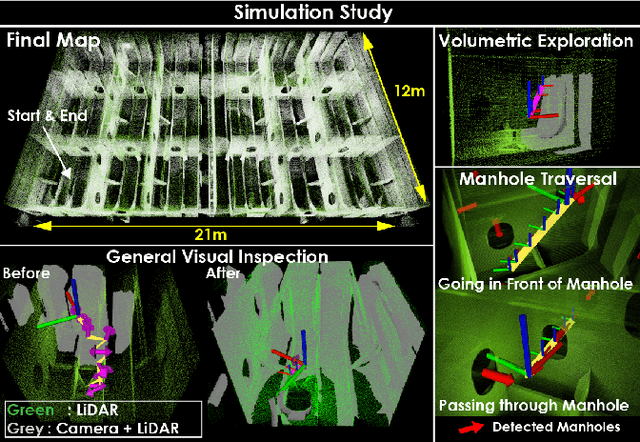
This paper presents a solution for the autonomous exploration and inspection of Ballast Water Tanks (BWTs) of marine vessels using aerial robots. Ballast tank compartments are critical for a vessel's safety and correspond to confined environments often connected through particularly narrow manholes. The method enables their volumetric exploration combined with visual inspection subject to constraints regarding the viewing distance from a surface. We present evaluation studies in simulation, in a mission consisting of 18 BWT compartments, and in 3 field experiments inside real vessels. The data from one of the experiments is also post-processed to generate semantically-segmented meshes of inspection-important geometries. Geometric models can be associated with onboard camera images for detailed and intuitive analysis.
Collision-tolerant Aerial Robots: A Survey
Dec 06, 2022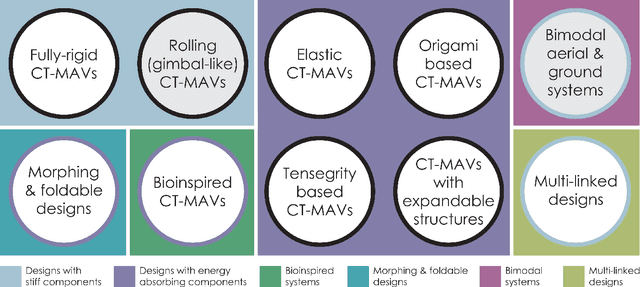
As aerial robots are tasked to navigate environments of increased complexity, embedding collision tolerance in their design becomes important. In this survey we review the current state-of-the-art within the niche field of collision-tolerant micro aerial vehicles and present different design approaches identified in the literature, as well as methods that have focused on autonomy functionalities that exploit collision resilience. Subsequently, we discuss the relevance to biological systems and provide our view on key directions of future fruitful research.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
Marsupial Walking-and-Flying Robotic Deployment for Collaborative Exploration of Unknown Environments
May 11, 2022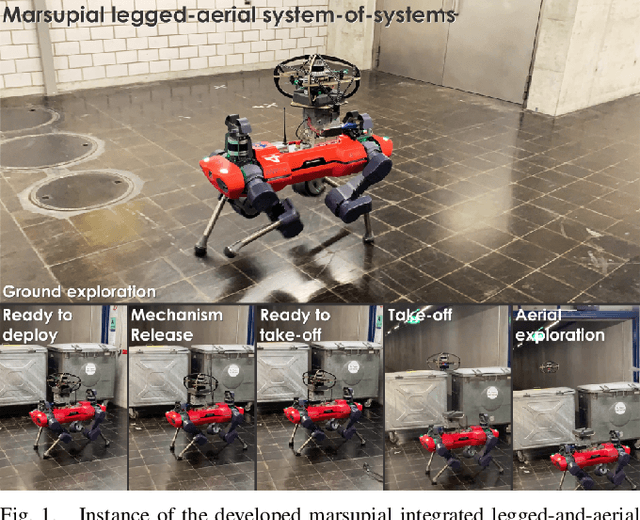
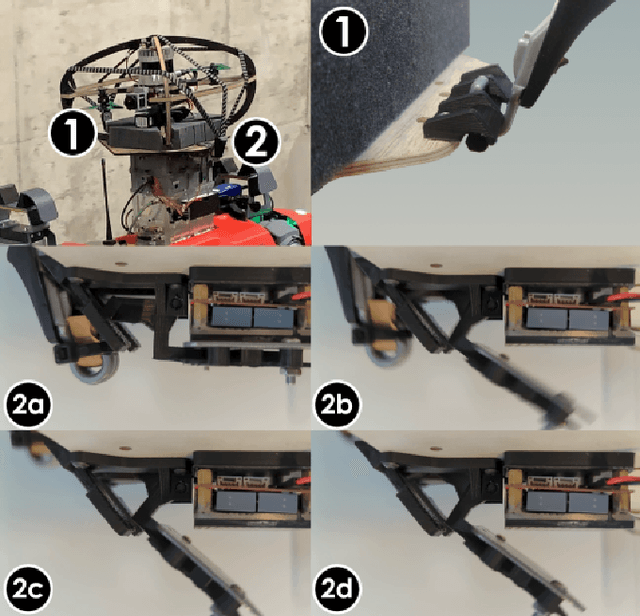
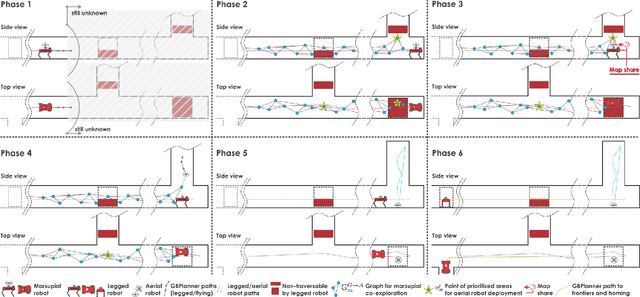
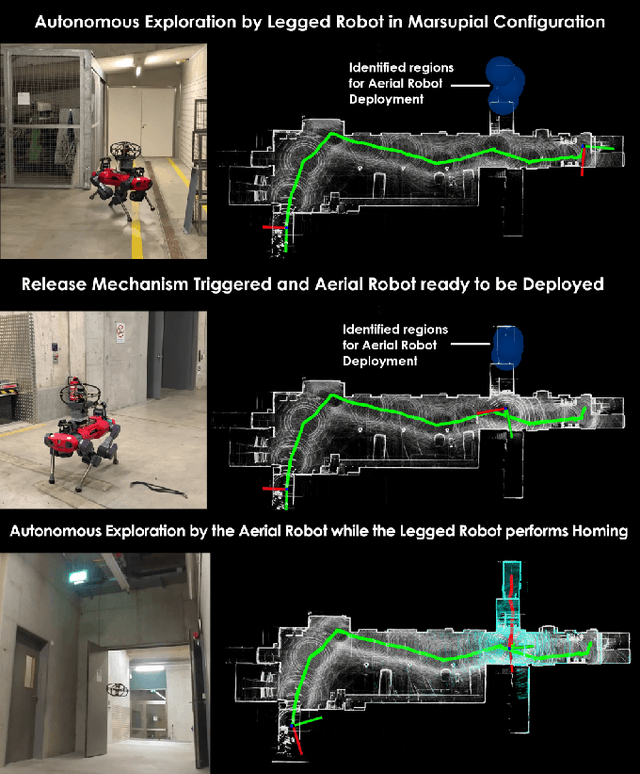
This work contributes a marsupial robotic system-of-systems involving a legged and an aerial robot capable of collaborative mapping and exploration path planning that exploits the heterogeneous properties of the two systems and the ability to selectively deploy the aerial system from the ground robot. Exploiting the dexterous locomotion capabilities and long endurance of quadruped robots, the marsupial combination can explore within large-scale and confined environments involving rough terrain. However, as certain types of terrain or vertical geometries can render any ground system unable to continue its exploration, the marsupial system can - when needed - deploy the flying robot which, by exploiting its 3D navigation capabilities, can undertake a focused exploration task within its endurance limitations. Focusing on autonomy, the two systems can co-localize and map together by sharing LiDAR-based maps and plan exploration paths individually, while a tailored graph search onboard the legged robot allows it to identify where and when the ferried aerial platform should be deployed. The system is verified within multiple experimental studies demonstrating the expanded exploration capabilities of the marsupial system-of-systems and facilitating the exploration of otherwise individually unreachable areas.
RMF-Owl: A Collision-Tolerant Flying Robot for Autonomous Subterranean Exploration
Feb 22, 2022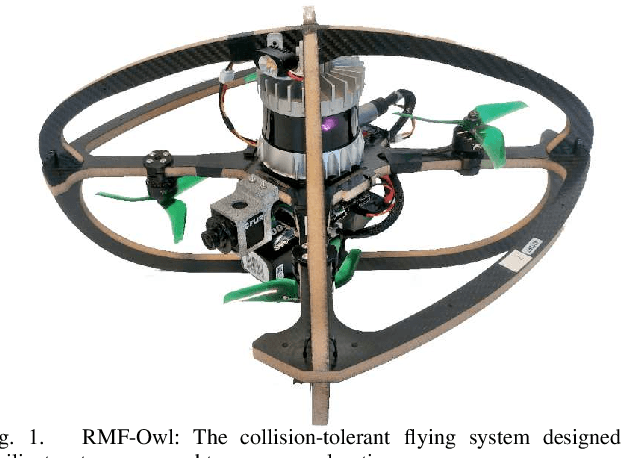
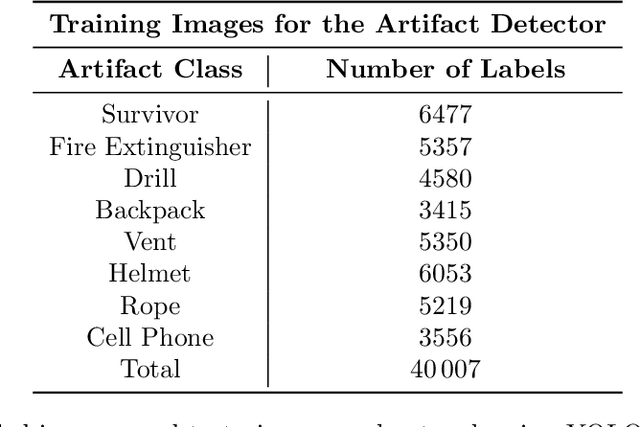
This work presents the design, hardware realization, autonomous exploration and object detection capabilities of RMF-Owl, a new collision-tolerant aerial robot tailored for resilient autonomous subterranean exploration. The system is custom built for underground exploration with focus on collision tolerance, resilient autonomy with robust localization and mapping, alongside high-performance exploration path planning in confined, obstacle-filled and topologically complex underground environments. Moreover, RMF-Owl offers the ability to search, detect and locate objects of interest which can be particularly useful in search and rescue missions. A series of results from field experiments are presented in order to demonstrate the system's ability to autonomously explore challenging unknown underground environments.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022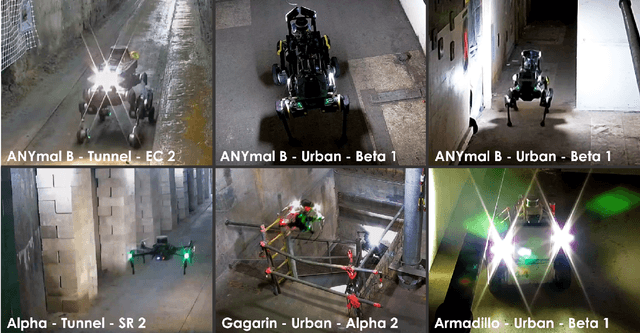

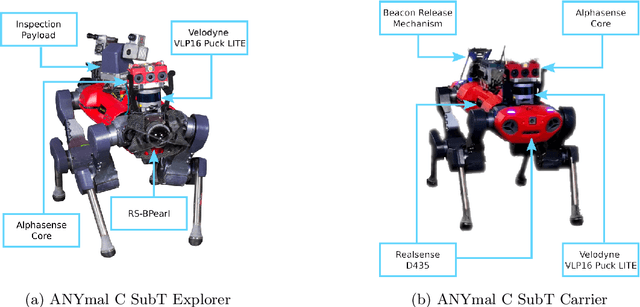
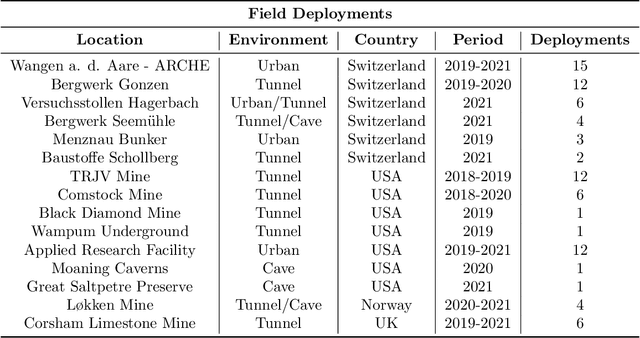
Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
Motion Primitives-based Navigation Planning using Deep Collision Prediction
Jan 11, 2022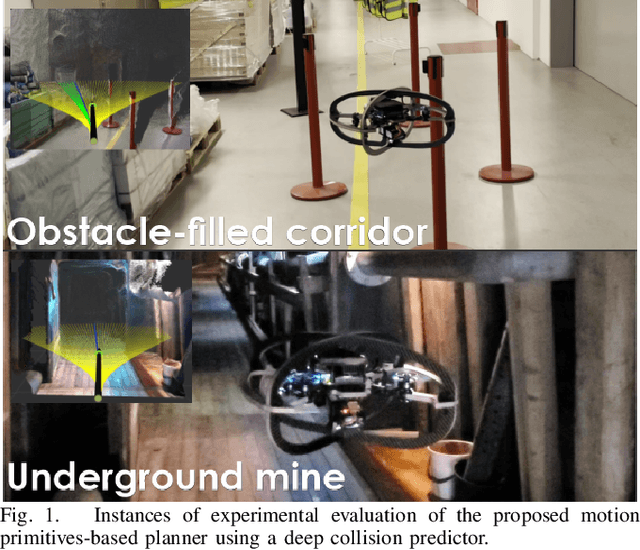
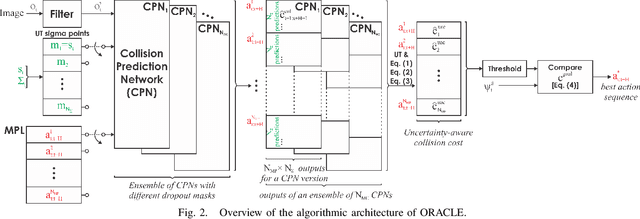
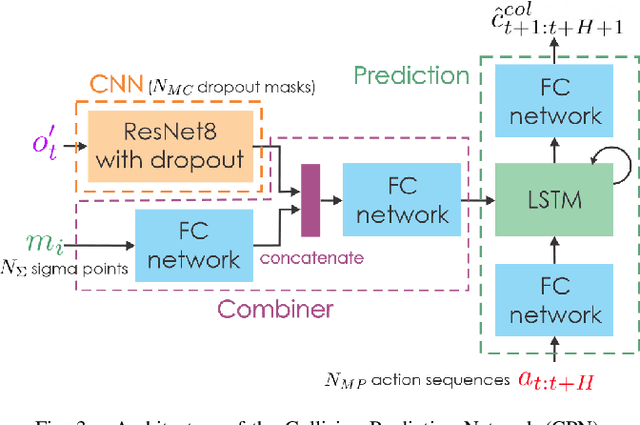
This paper contributes a method to design a novel navigation planner exploiting a learning-based collision prediction network. The neural network is tasked to predict the collision cost of each action sequence in a predefined motion primitives library in the robot's velocity-steering angle space, given only the current depth image and the estimated linear and angular velocities of the robot. Furthermore, we account for the uncertainty of the robot's partial state by utilizing the Unscented Transform and the uncertainty of the neural network model by using Monte Carlo dropout. The uncertainty-aware collision cost is then combined with the goal direction given by a global planner in order to determine the best action sequence to execute in a receding horizon manner. To demonstrate the method, we develop a resilient small flying robot integrating lightweight sensing and computing resources. A set of simulation and experimental studies, including a field deployment, in both cluttered and perceptually-challenging environments is conducted to evaluate the quality of the prediction network and the performance of the proposed planner.
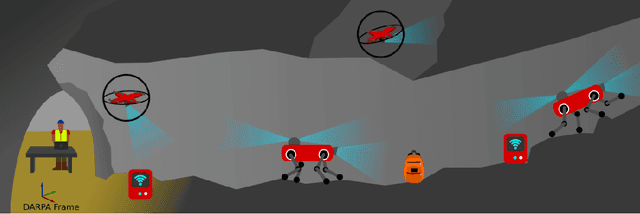
Autonomous Teamed Exploration of Subterranean Environments using Legged and Aerial Robots
Nov 11, 2021
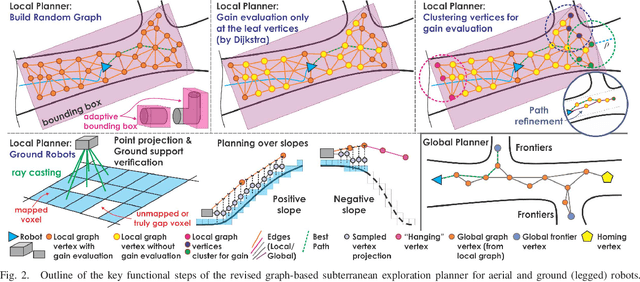
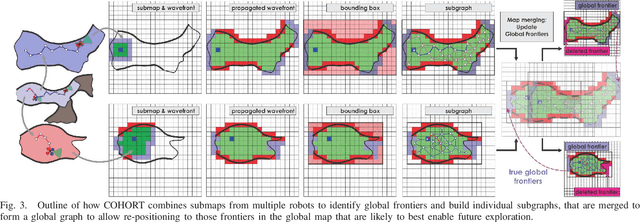
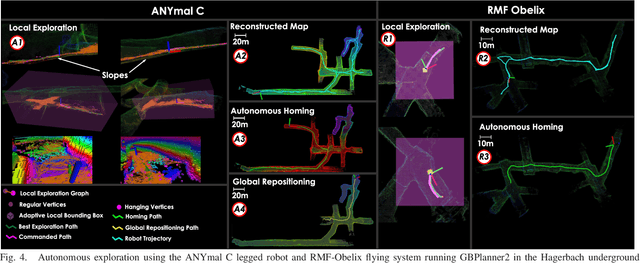
This paper presents a novel strategy for autonomous teamed exploration of subterranean environments using legged and aerial robots. Tailored to the fact that subterranean settings, such as cave networks and underground mines, often involve complex, large-scale and multi-branched topologies, while wireless communication within them can be particularly challenging, this work is structured around the synergy of an onboard exploration path planner that allows for resilient long-term autonomy, and a multi-robot coordination framework. The onboard path planner is unified across legged and flying robots and enables navigation in environments with steep slopes, and diverse geometries. When a communication link is available, each robot of the team shares submaps to a centralized location where a multi-robot coordination framework identifies global frontiers of the exploration space to inform each system about where it should re-position to best continue its mission. The strategy is verified through a field deployment inside an underground mine in Switzerland using a legged and a flying robot collectively exploring for 45 min, as well as a longer simulation study with three systems.