Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-tolerant Aerial Robots: A Survey
Dec 06, 2022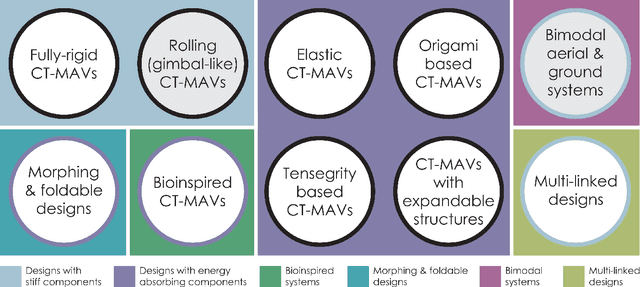
As aerial robots are tasked to navigate environments of increased complexity, embedding collision tolerance in their design becomes important. In this survey we review the current state-of-the-art within the niche field of collision-tolerant micro aerial vehicles and present different design approaches identified in the literature, as well as methods that have focused on autonomy functionalities that exploit collision resilience. Subsequently, we discuss the relevance to biological systems and provide our view on key directions of future fruitful research.
* 12 pages, 1 figure
Via