 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMU-Preintegrated Radar Factors for Asynchronous Radar-LiDAR-Inertial SLAM
Sep 26, 2025Fixed-lag Radar-LiDAR-Inertial smoothers conventionally create one factor graph node per measurement to compensate for the lack of time synchronization between radar and LiDAR. For a radar-LiDAR sensor pair with equal rates, this strategy results in a state creation rate of twice the individual sensor frequencies. This doubling of the number of states per second yields high optimization costs, inhibiting real-time performance on resource-constrained hardware. We introduce IMU-preintegrated radar factors that use high-rate inertial data to propagate the most recent LiDAR state to the radar measurement timestamp. This strategy maintains the node creation rate at the LiDAR measurement frequency. Assuming equal sensor rates, this lowers the number of nodes by 50 % and consequently the computational costs. Experiments on a single board computer (which has 4 cores each of 2.2 GHz A73 and 2 GHz A53 with 8 GB RAM) show that our method preserves the absolute pose error of a conventional baseline while simultaneously lowering the aggregated factor graph optimization time by up to 56 %.
Embedded Safe Reactive Navigation for Multirotors Systems using Control Barrier Functions
Apr 22, 2025Aiming to promote the wide adoption of safety filters for autonomous aerial robots, this paper presents a safe control architecture designed for seamless integration into widely used open-source autopilots. Departing from methods that require consistent localization and mapping, we formalize the obstacle avoidance problem as a composite control barrier function constructed only from the online onboard range measurements. The proposed framework acts as a safety filter, modifying the acceleration references derived by the nominal position/velocity control loops, and is integrated into the PX4 autopilot stack. Experimental studies using a small multirotor aerial robot demonstrate the effectiveness and performance of the solution within dynamic maneuvering and unknown environments.
Robust High-Speed State Estimation for Off-road Navigation using Radar Velocity Factors
Sep 17, 2024Enabling robot autonomy in complex environments for mission critical application requires robust state estimation. Particularly under conditions where the exteroceptive sensors, which the navigation depends on, can be degraded by environmental challenges thus, leading to mission failure. It is precisely in such challenges where the potential for FMCW radar sensors is highlighted: as a complementary exteroceptive sensing modality with direct velocity measuring capabilities. In this work we integrate radial speed measurements from a FMCW radar sensor, using a radial speed factor, to provide linear velocity updates into a sliding-window state estimator for fusion with LiDAR pose and IMU measurements. We demonstrate that this augmentation increases the robustness of the state estimator to challenging conditions present in the environment and the negative effects they can pose to vulnerable exteroceptive modalities. The proposed method is extensively evaluated using robotic field experiments conducted using an autonomous, full-scale, off-road vehicle operating at high-speeds (~12 m/s) in complex desert environments. Furthermore, the robustness of the approach is demonstrated for cases of both simulated and real-world degradation of the LiDAR odometry performance along with comparison against state-of-the-art methods for radar-inertial odometry on public datasets.
Maritime Vessel Tank Inspection using Aerial Robots: Experience from the field and dataset release
Apr 29, 2024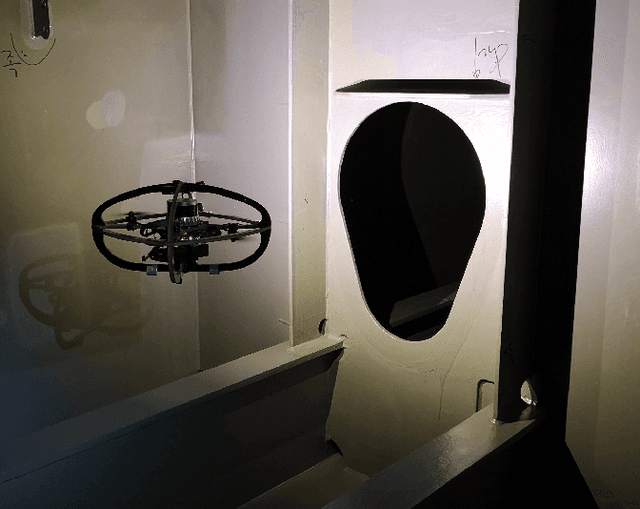
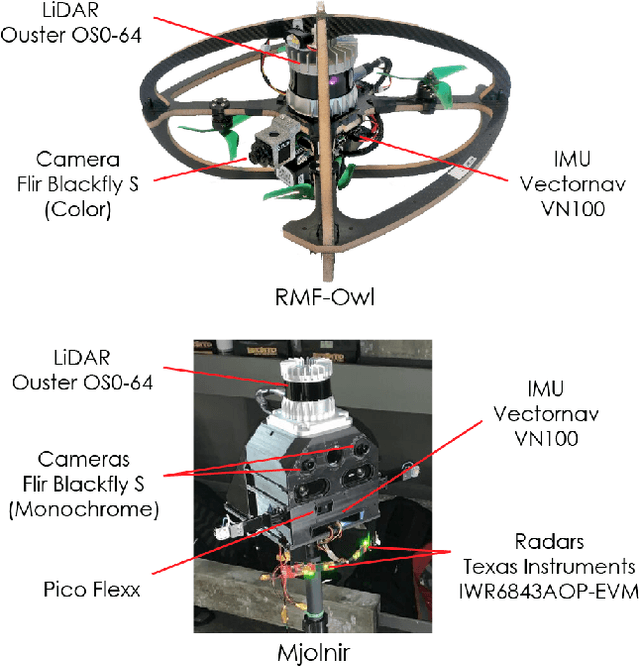
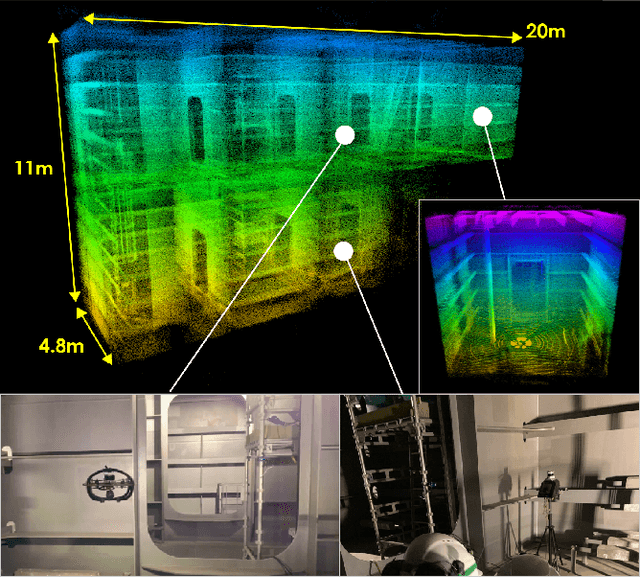
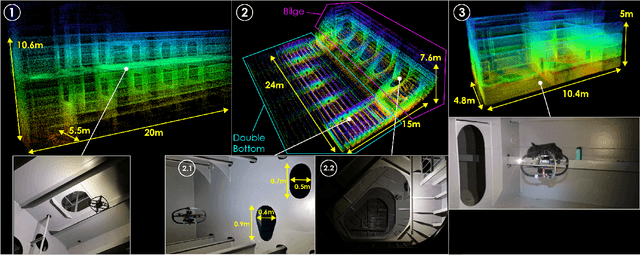
This paper presents field results and lessons learned from the deployment of aerial robots inside ship ballast tanks. Vessel tanks including ballast tanks and cargo holds present dark, dusty environments having simultaneously very narrow openings and wide open spaces that create several challenges for autonomous navigation and inspection operations. We present a system for vessel tank inspection using an aerial robot along with its autonomy modules. We show the results of autonomous exploration and visual inspection in 3 ships spanning across 7 distinct types of sections of the ballast tanks. Additionally, we comment on the lessons learned from the field and possible directions for future work. Finally, we release a dataset consisting of the data from these missions along with data collected with a handheld sensor stick.
Degradation Resilient LiDAR-Radar-Inertial Odometry
Mar 08, 2024Enabling autonomous robots to operate robustly in challenging environments is necessary in a future with increased autonomy. For many autonomous systems, estimation and odometry remains a single point of failure, from which it can often be difficult, if not impossible, to recover. As such robust odometry solutions are of key importance. In this work a method for tightly-coupled LiDAR-Radar-Inertial fusion for odometry is proposed, enabling the mitigation of the effects of LiDAR degeneracy by leveraging a complementary perception modality while preserving the accuracy of LiDAR in well-conditioned environments. The proposed approach combines modalities in a factor graph-based windowed smoother with sensor information-specific factor formulations which enable, in the case of degeneracy, partial information to be conveyed to the graph along the non-degenerate axes. The proposed method is evaluated in real-world tests on a flying robot experiencing degraded conditions including geometric self-similarity as well as obscurant occlusion. For the benefit of the community we release the datasets presented: https://github.com/ntnu-arl/lidar_degeneracy_datasets.
ROAMER: Robust Offroad Autonomy using Multimodal State Estimation with Radar Velocity Integration
Jan 30, 2024Reliable offroad autonomy requires low-latency, high-accuracy state estimates of pose as well as velocity, which remain viable throughout environments with sub-optimal operating conditions for the utilized perception modalities. As state estimation remains a single point of failure system in the majority of aspiring autonomous systems, failing to address the environmental degradation the perception sensors could potentially experience given the operating conditions, can be a mission-critical shortcoming. In this work, a method for integration of radar velocity information in a LiDAR-inertial odometry solution is proposed, enabling consistent estimation performance even with degraded LiDAR-inertial odometry. The proposed method utilizes the direct velocity-measuring capabilities of an Frequency Modulated Continuous Wave (FMCW) radar sensor to enhance the LiDAR-inertial smoother solution onboard the vehicle through integration of the forward velocity measurement into the graph-based smoother. This leads to increased robustness in the overall estimation solution, even in the absence of LiDAR data. This method was validated by hardware experiments conducted onboard an all-terrain vehicle traveling at high speed, ~12 m/s, in demanding offroad environments.