 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaritime Vessel Tank Inspection using Aerial Robots: Experience from the field and dataset release
Paper and Code
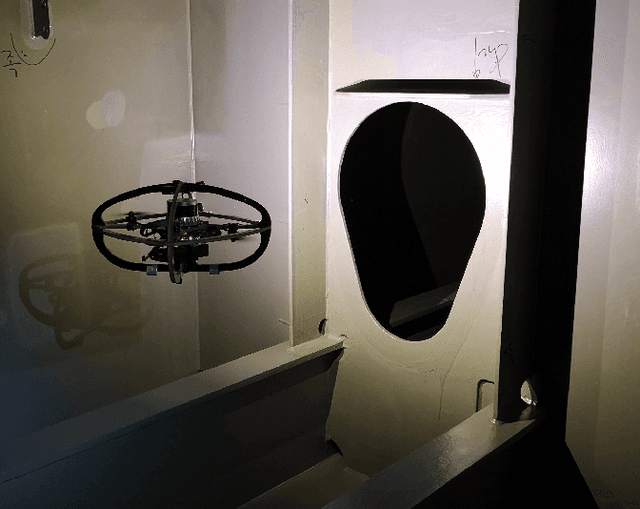
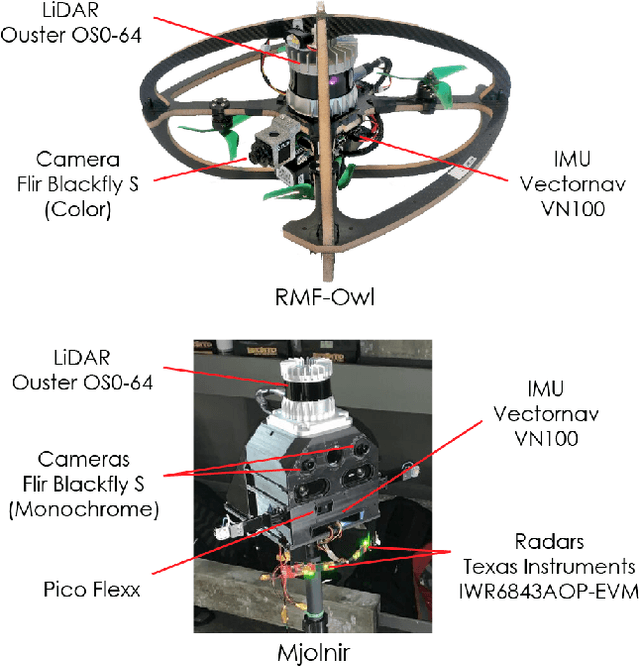
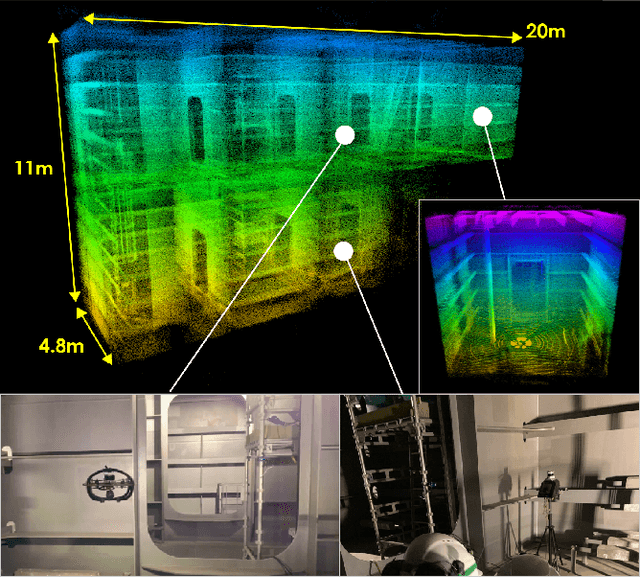
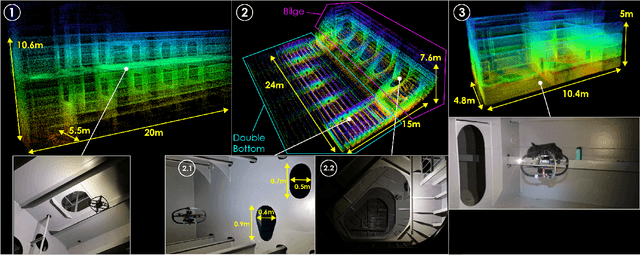
This paper presents field results and lessons learned from the deployment of aerial robots inside ship ballast tanks. Vessel tanks including ballast tanks and cargo holds present dark, dusty environments having simultaneously very narrow openings and wide open spaces that create several challenges for autonomous navigation and inspection operations. We present a system for vessel tank inspection using an aerial robot along with its autonomy modules. We show the results of autonomous exploration and visual inspection in 3 ships spanning across 7 distinct types of sections of the ballast tanks. Additionally, we comment on the lessons learned from the field and possible directions for future work. Finally, we release a dataset consisting of the data from these missions along with data collected with a handheld sensor stick.