 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarsupial Walking-and-Flying Robotic Deployment for Collaborative Exploration of Unknown Environments
Paper and Code
May 11, 2022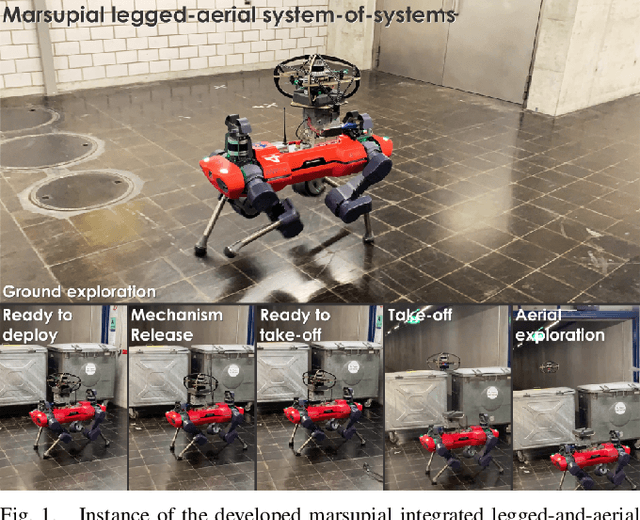
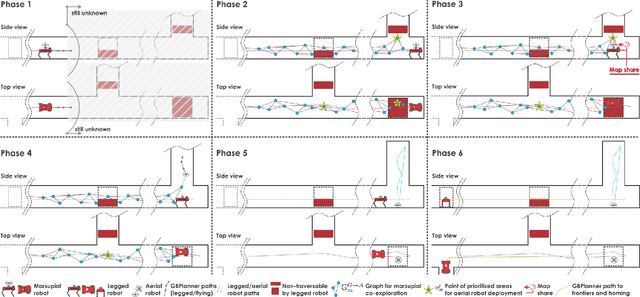
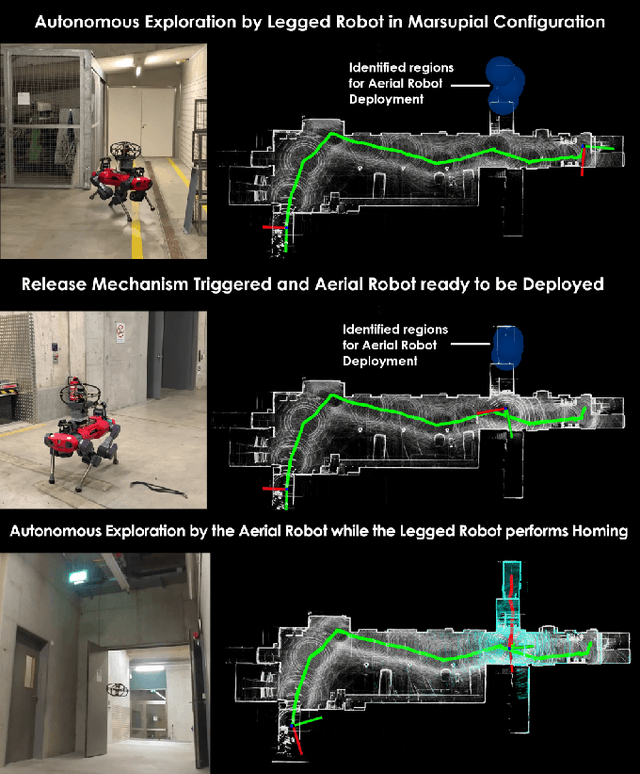
This work contributes a marsupial robotic system-of-systems involving a legged and an aerial robot capable of collaborative mapping and exploration path planning that exploits the heterogeneous properties of the two systems and the ability to selectively deploy the aerial system from the ground robot. Exploiting the dexterous locomotion capabilities and long endurance of quadruped robots, the marsupial combination can explore within large-scale and confined environments involving rough terrain. However, as certain types of terrain or vertical geometries can render any ground system unable to continue its exploration, the marsupial system can - when needed - deploy the flying robot which, by exploiting its 3D navigation capabilities, can undertake a focused exploration task within its endurance limitations. Focusing on autonomy, the two systems can co-localize and map together by sharing LiDAR-based maps and plan exploration paths individually, while a tailored graph search onboard the legged robot allows it to identify where and when the ferried aerial platform should be deployed. The system is verified within multiple experimental studies demonstrating the expanded exploration capabilities of the marsupial system-of-systems and facilitating the exploration of otherwise individually unreachable areas.