 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeam CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
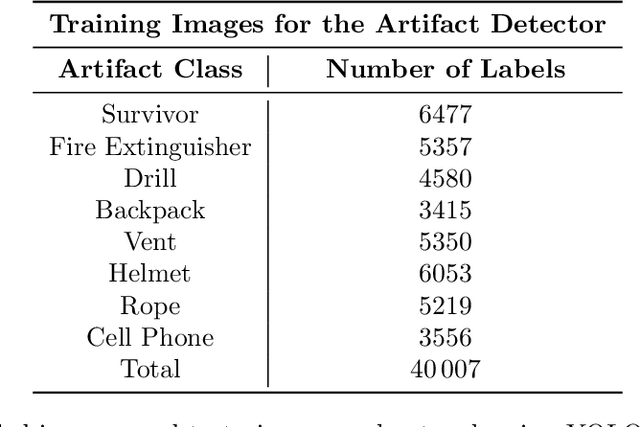
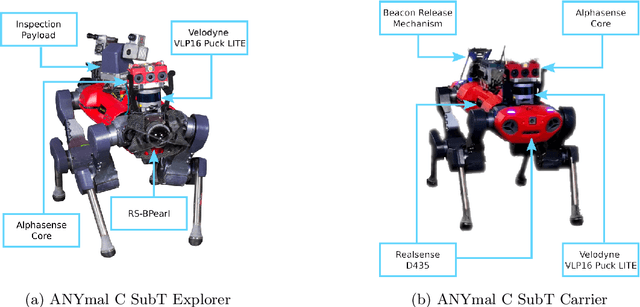
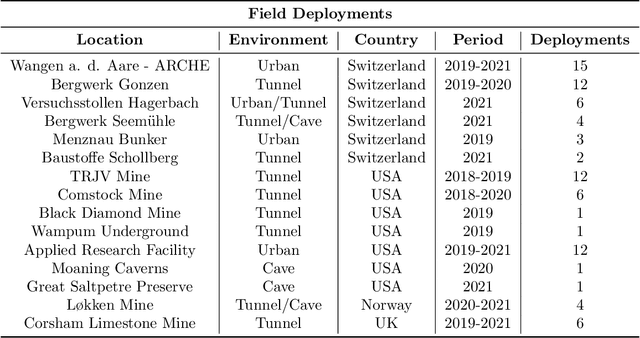
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
SymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022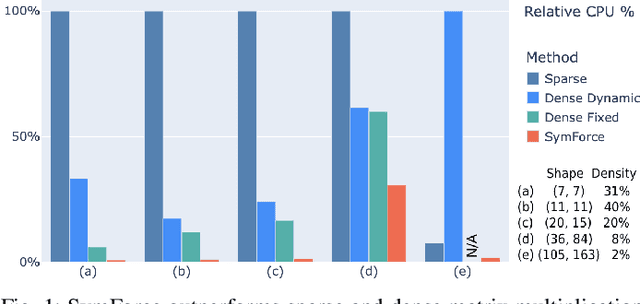
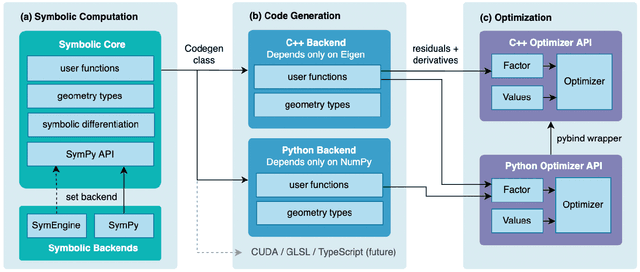
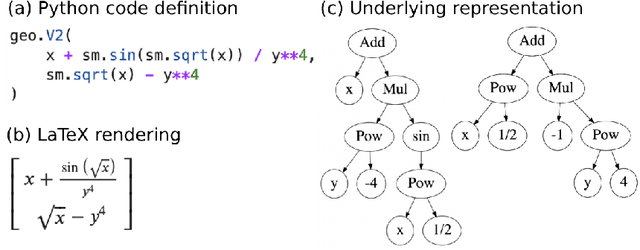
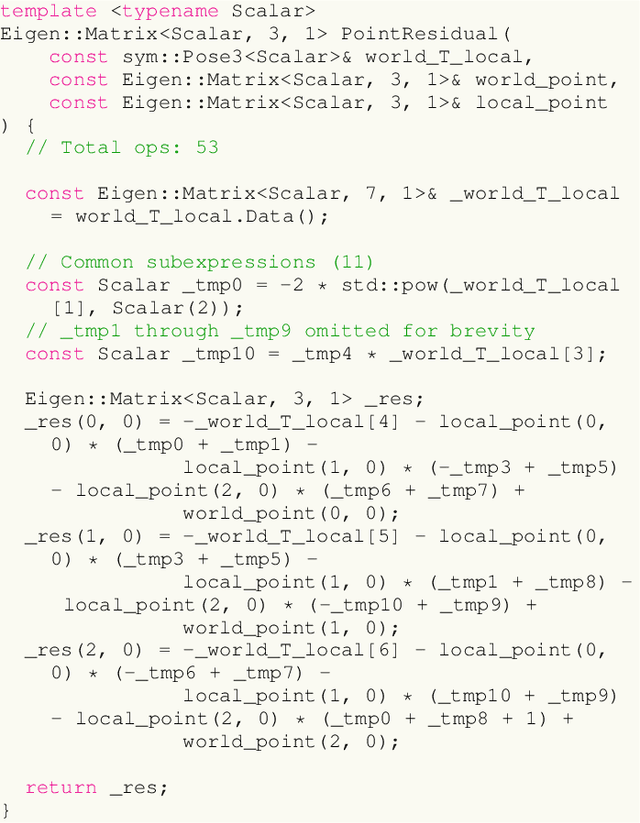
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022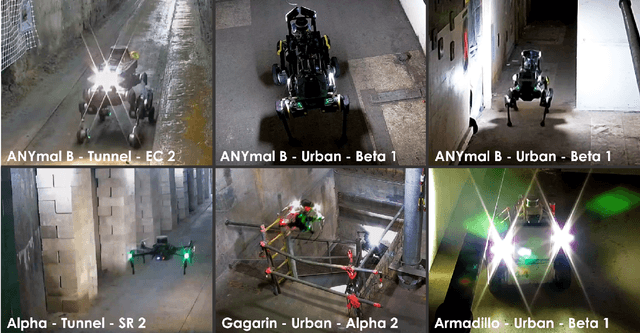

Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
Appendix for the Motion Primitives-based Path Planning for Fast and Agile Exploration Method
Dec 06, 2020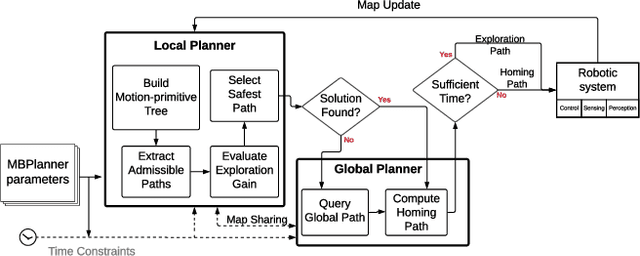
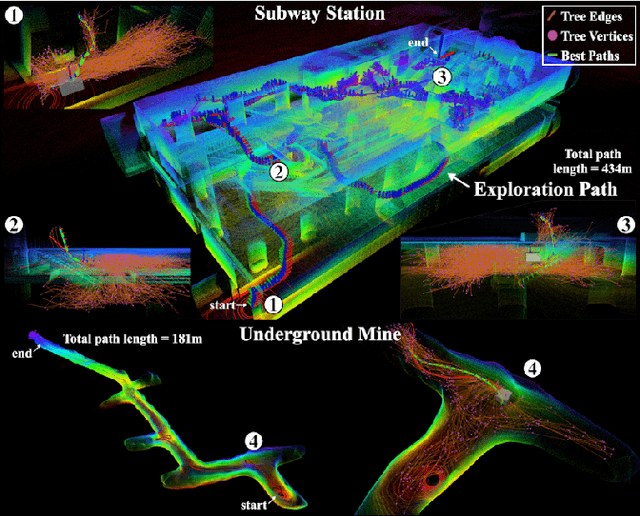
This manuscript presents enhancements on our motion-primitives exploration path planning method for agile exploration using aerial robots. The method now further integrates a global planning layer to facilitate reliable large-scale exploration. The implemented bifurcation between local and global planning allows for efficient exploration combined with the ability to plan within very large environments, while also ensuring safe and timely return-to-home. A new set of simulation studies and experimental results are presented to demonstrate the new improvements and enhancements. The method is available open source as a Robot Operating System (ROS) package.
Autonomous Aerial Robotic Surveying and Mapping with Application to Construction Operations
May 09, 2020
In this paper we present an overview of the methods and systems that give rise to a flying robotic system capable of autonomous inspection, surveying, comprehensive multi-modal mapping and inventory tracking of construction sites with high degree of systematicity. The robotic system can operate assuming either no prior knowledge of the environment or by integrating a prior model of it. In the first case, autonomous exploration is provided which returns a high fidelity $3\textrm{D}$ map associated with color and thermal vision information. In the second case, the prior model of the structure can be used to provide optimized and repetitive coverage paths. The robot delivers its mapping result autonomously, while simultaneously being able to detect and localize objects of interest thus supporting inventory tracking tasks. The system has been field verified in a collection of environments and has been tested inside a construction project related to public housing.
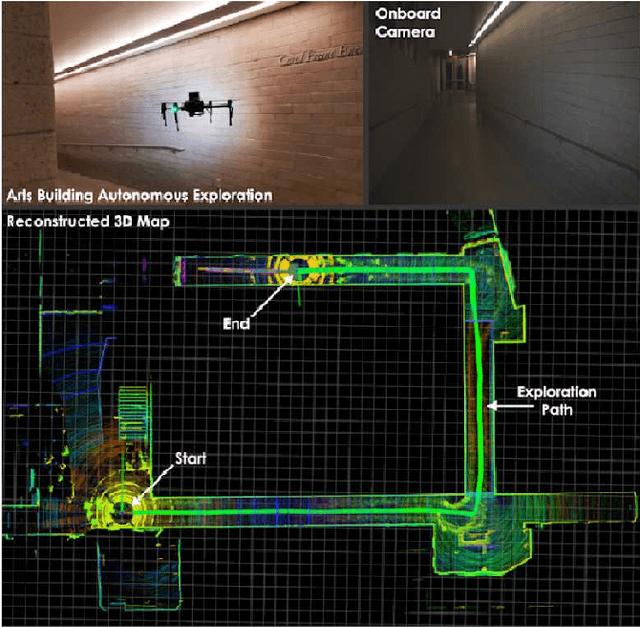
Visual-Inertial Odometry-enhanced Geometrically Stable ICP for Mapping Applications using Aerial Robots
Jan 29, 2018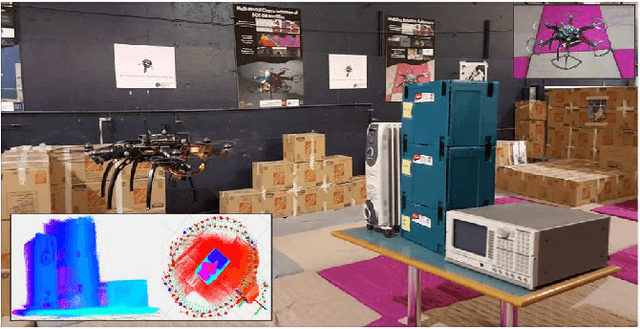
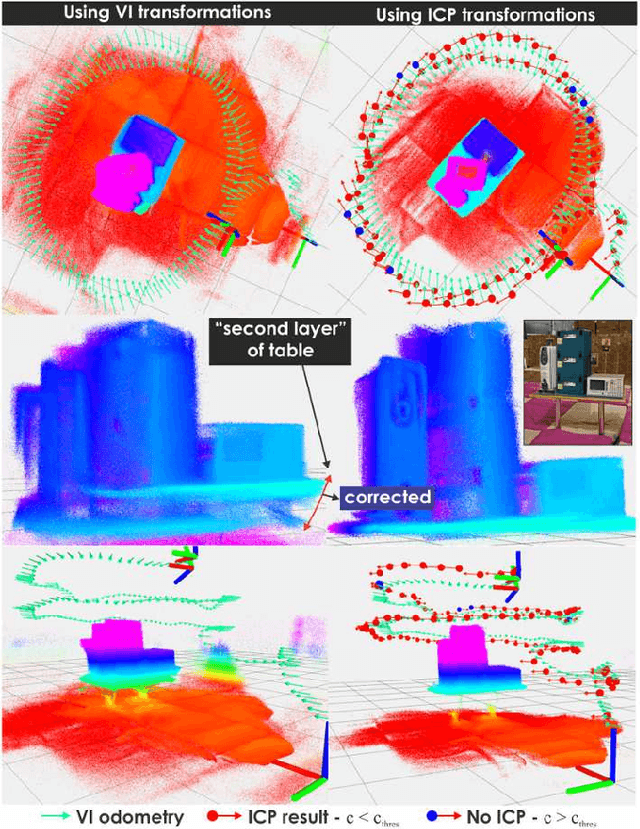
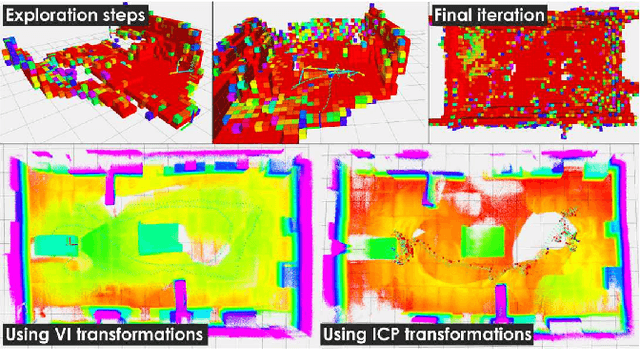

This paper presents a visual-inertial odometry-enhanced geometrically stable Iterative Closest Point (ICP) algorithm for accurate mapping using aerial robots. The proposed method employs a visual-inertial odometry framework in order to provide robust priors to the ICP step and calculate the overlap among point clouds derived from an onboard time-of-flight depth sensor. Within the overlapping parts of the point clouds, the method samples points such that the distribution of normals among them is as large as possible. As different geometries and sensor trajectories will influence the performance of the alignment process, evaluation of the expected geometric stability of the ICP step is conducted. It is only when this test is successful that the matching, outlier rejection, and minimization of the error metric ICP steps are conducted and the new relative translation and rotational components are estimated, otherwise the system relies on the visual-inertial odometry transformation estimates. The proposed strategy was evaluated within handheld, automated and fully autonomous exploration and mapping missions using a small aerial robot and was shown to provide robust results of superior quality at an affordable increase of the computational load.
Towards Robotically Supported Decommissioning of Nuclear Sites
May 18, 2017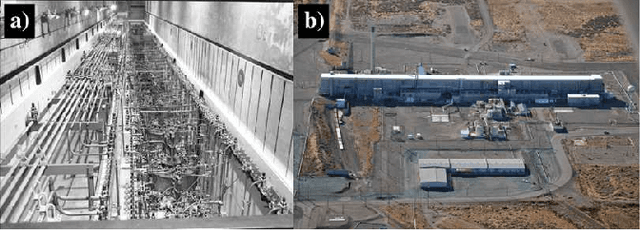

This paper overviews certain radiation detection, perception, and planning challenges for nuclearized robotics that aim to support the waste management and decommissioning mission. To enable the autonomous monitoring, inspection and multi-modal characterization of nuclear sites, we discuss important problems relevant to the tasks of navigation in degraded visual environments, localizability-aware exploration and mapping without any prior knowledge of the environment, as well as robotic radiation detection. Future contributions will focus on each of the relevant problems, will aim to deliver a comprehensive multi-modal mapping result, and will emphasize on extensive field evaluation and system verification.