 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022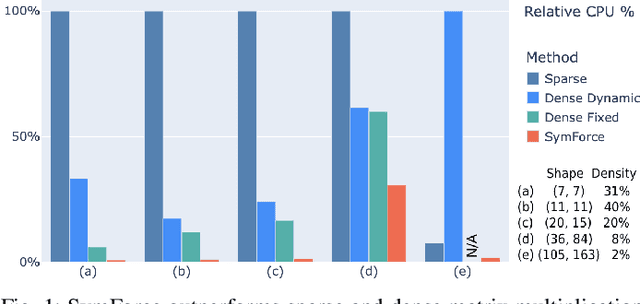
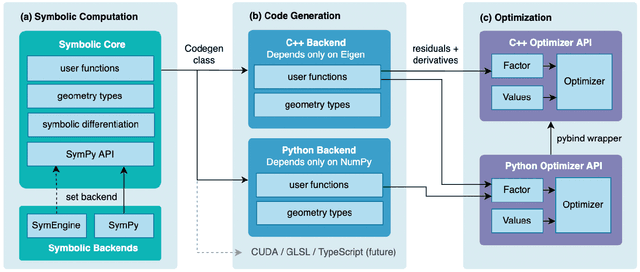
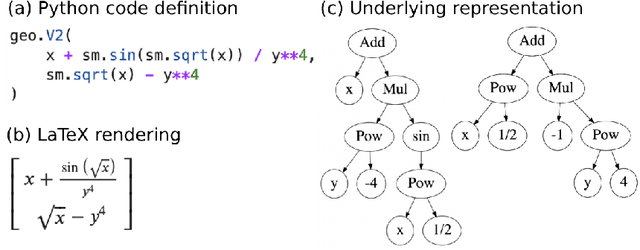
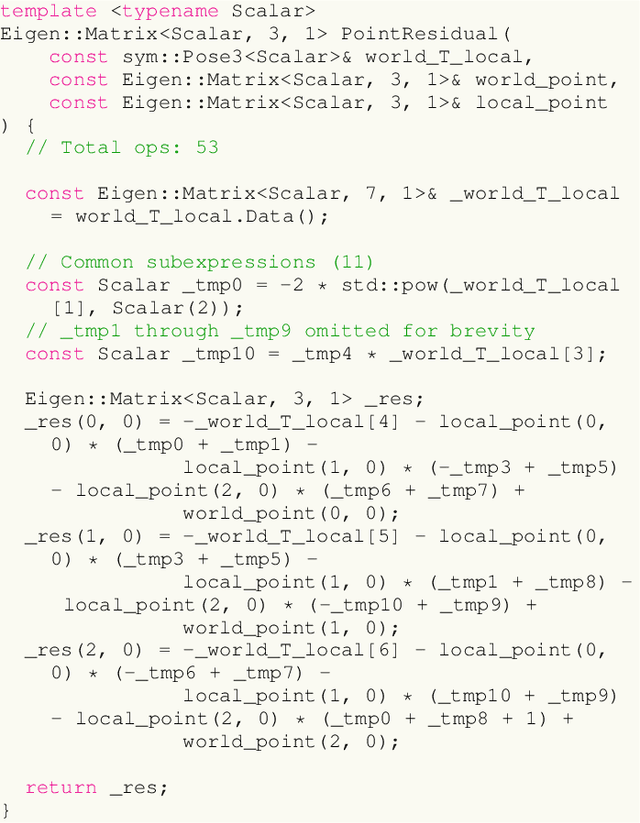
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .
Design and Control of a Midair Reconfigurable Quadcopter using Unactuated Hinges
Mar 30, 2021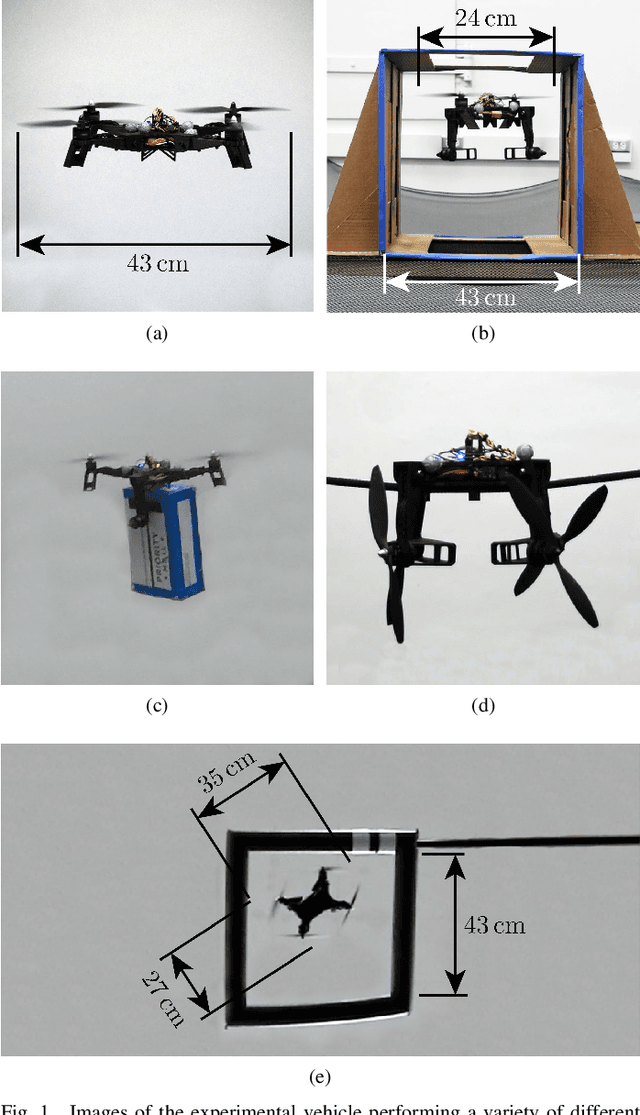
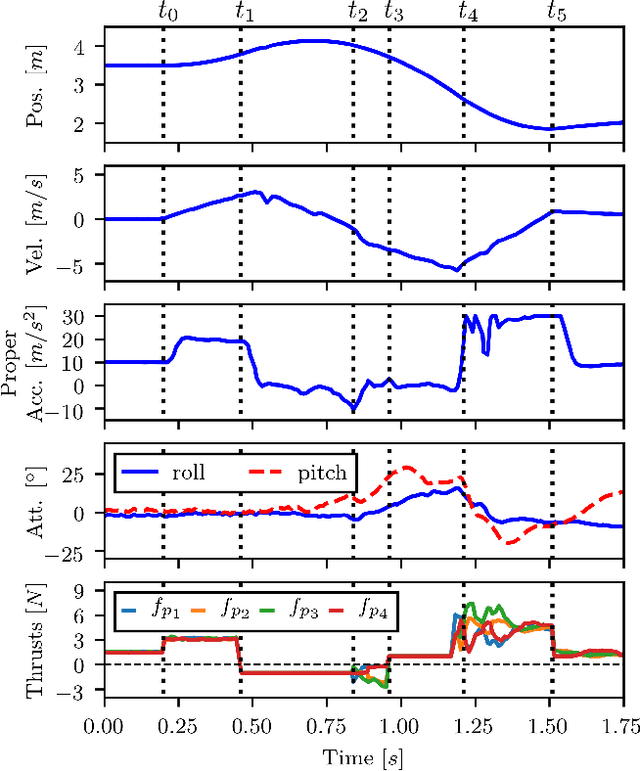
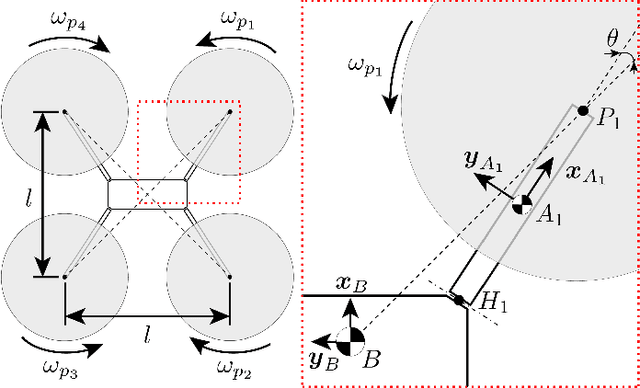

This paper presents the design and control of a novel quadcopter capable of changing shape mid-flight, allowing for operation in four configurations with the capability of sustained hover in three. The normally rigid connections between the arms of the quadcopter and the central body are replaced by free-rotating hinges that allow the arms to fold downward; no additional actuators beyond the four motors that drive the propellers are used. Configuration transitions are accomplished by either reducing or reversing the thrust forces produced by specific propellers during flight. Constraints placed on the control inputs of the vehicle prevent the arms from folding or unfolding unexpectedly, allowing for the use of existing quadcopter controllers and trajectory generation algorithms. For our experimental vehicle at hover, we find that these constraints result in a 36% reduction of the maximum yaw torque the vehicle can produce, but do not result in a reduction of the maximum thrust or roll and pitch torques. Furthermore, the ability to change configurations is shown to enable the vehicle to traverse small passages, perch on hanging wires, and perform simple grasping tasks.
Rectangular Pyramid Partitioning using Integrated Depth Sensors (RAPPIDS): A Fast Planner for Multicopter Navigation
Mar 02, 2020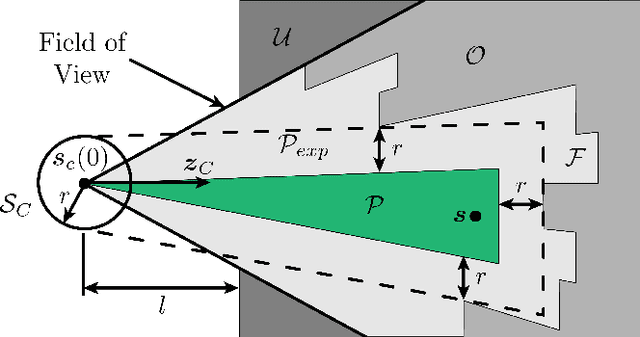
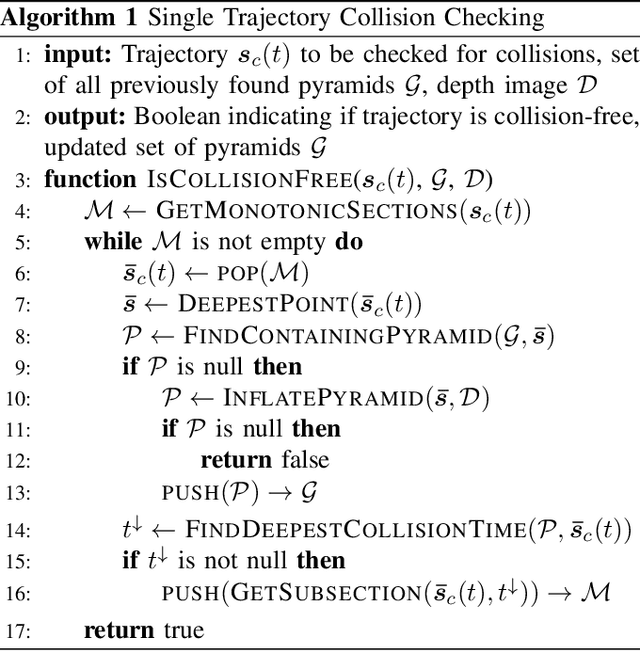
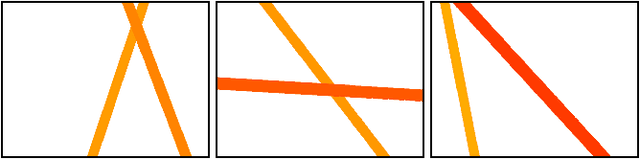
We present a novel multicopter trajectory planning algorithm (RAPPIDS) that is capable of quickly finding local collision-free trajectories given a single depth image from an onboard camera. The algorithm leverages a new pyramid-based spatial partitioning method that enables rapid collision detection between candidate trajectories and the environment. Due to its efficiency, the algorithm can be run at high rates on computationally constrained hardware, evaluating thousands of candidate trajectories in milliseconds. The performance of the algorithm is compared to existing collision checking methods in simulation, showing our method to be capable of evaluating orders of magnitude more trajectories per second. Experimental results are presented showing a quadcopter quickly navigating a previously unseen cluttered environment by running the algorithm on an ODROID-XU4 at 30 Hz.
Rapid Collision Detection for Multicopter Trajectories
Apr 08, 2019
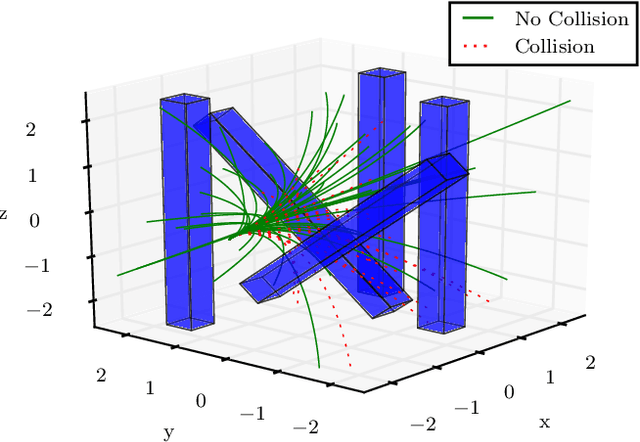
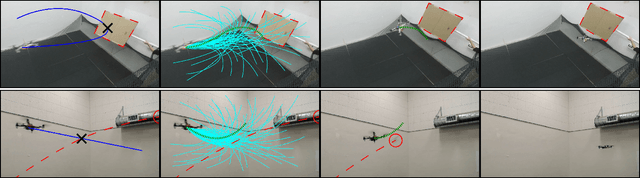
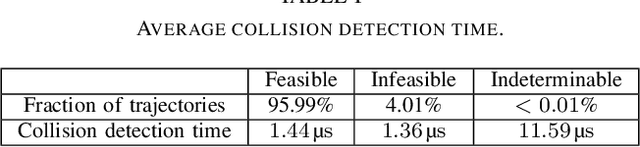
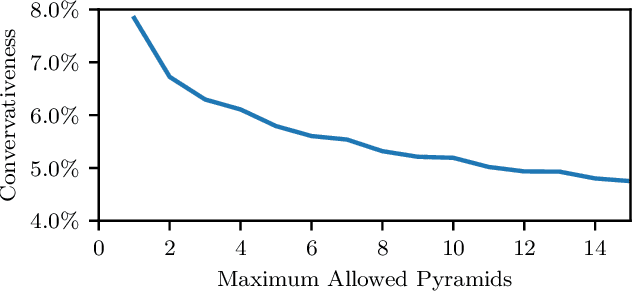
We present an algorithm for quickly detecting whether certain polynomial trajectories in time intersect with convex obstacles. The algorithm is used in conjunction with an existing multicopter trajectory generation method to achieve rapid, obstacle-aware motion planning in environments with both static convex obstacles and dynamic convex obstacles whose boundaries do not rotate. In general, this problem is difficult because the presence of convex obstacles makes the feasible space of trajectories nonconvex. The performance of the algorithm is benchmarked using Monte Carlo simulations, and experimental results are presented that demonstrate the use of the method to plan collision-free multicopter trajectories in milliseconds in environments with both static and dynamic obstacles.