 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry aware Reynolds Averaged Navier Stokes turbulence models with equivariant neural networks
Nov 12, 2025Accurate and generalizable Reynolds-averaged Navier-Stokes (RANS) models for turbulent flows rely on effective closures. We introduce tensor-based, symmetry aware closures using equivariant neural networks (ENNs) and present an algorithm for enforcing algebraic contraction relations among tensor components. The modeling approach builds on the structure tensor framework introduced by Kassinos and Reynolds to learn closures in the rapid distortion theory setting. Experiments show that ENNs can effectively learn relationships involving high-order tensors, meeting or exceeding the performance of existing models in tasks such as predicting the rapid pressure-strain correlation. Our results show that ENNs provide a physically consistent alternative to classical tensor basis models, enabling end-to-end learning of unclosed terms in RANS and fast exploration of model dependencies.
GPT4All: An Ecosystem of Open Source Compressed Language Models
Nov 06, 2023Large language models (LLMs) have recently achieved human-level performance on a range of professional and academic benchmarks. The accessibility of these models has lagged behind their performance. State-of-the-art LLMs require costly infrastructure; are only accessible via rate-limited, geo-locked, and censored web interfaces; and lack publicly available code and technical reports. In this paper, we tell the story of GPT4All, a popular open source repository that aims to democratize access to LLMs. We outline the technical details of the original GPT4All model family, as well as the evolution of the GPT4All project from a single model into a fully fledged open source ecosystem. It is our hope that this paper acts as both a technical overview of the original GPT4All models as well as a case study on the subsequent growth of the GPT4All open source ecosystem.
SymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022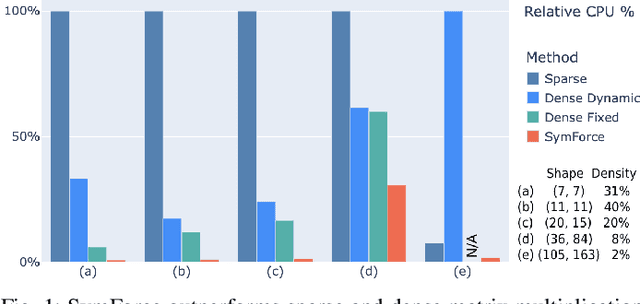
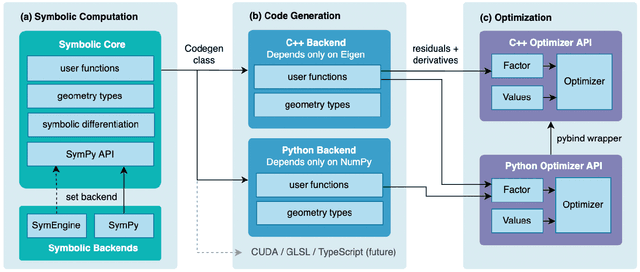
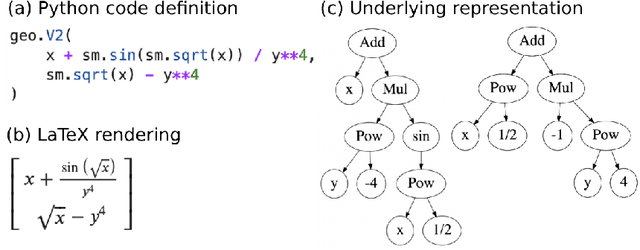
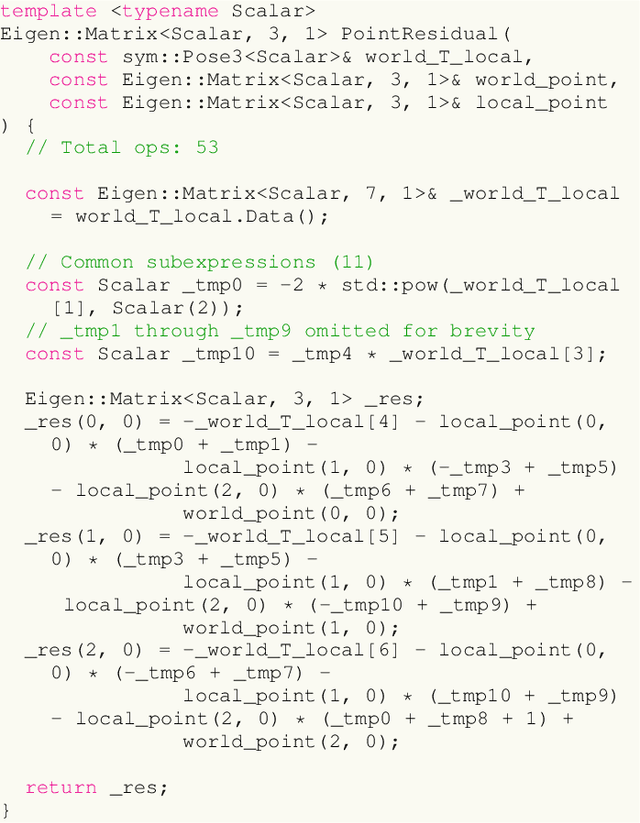
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .