 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesizing Public Opinions with LLMs: Role Creation, Impacts, and the Future to eDemorcacy
Mar 31, 2025This paper investigates the use of Large Language Models (LLMs) to synthesize public opinion data, addressing challenges in traditional survey methods like declining response rates and non-response bias. We introduce a novel technique: role creation based on knowledge injection, a form of in-context learning that leverages RAG and specified personality profiles from the HEXACO model and demographic information, and uses that for dynamically generated prompts. This method allows LLMs to simulate diverse opinions more accurately than existing prompt engineering approaches. We compare our results with pre-trained models with standard few-shot prompts. Experiments using questions from the Cooperative Election Study (CES) demonstrate that our role-creation approach significantly improves the alignment of LLM-generated opinions with real-world human survey responses, increasing answer adherence. In addition, we discuss challenges, limitations and future research directions.
SymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022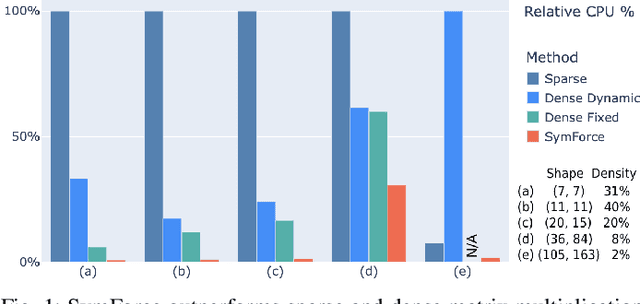
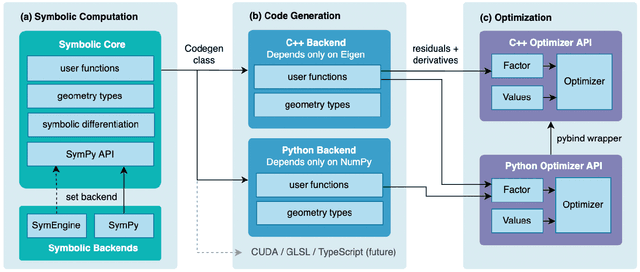
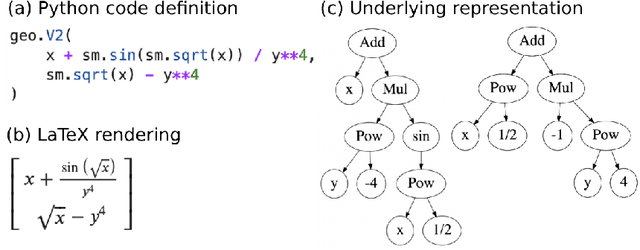
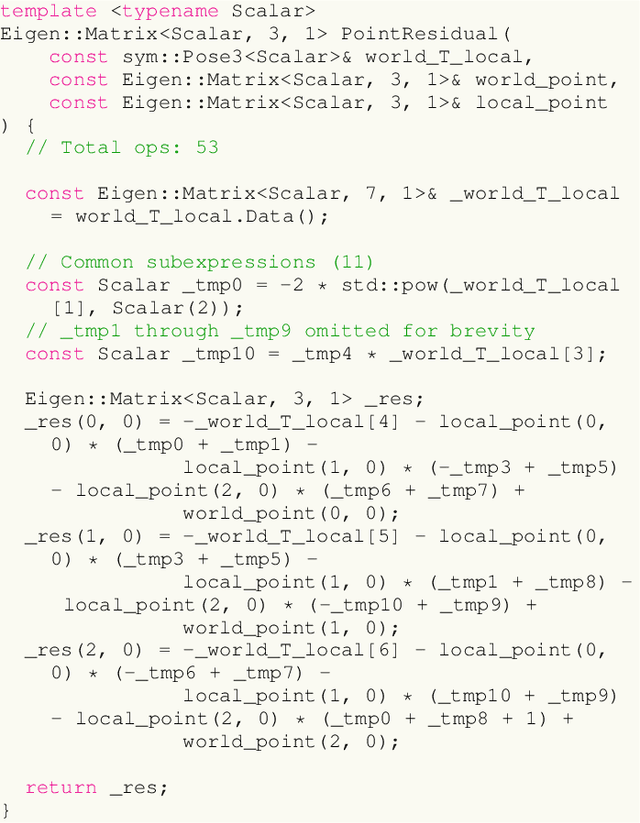
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .
End-to-End Learning of Geometry and Context for Deep Stereo Regression
Mar 13, 2017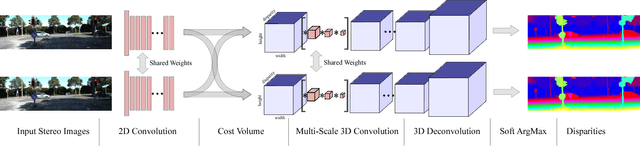
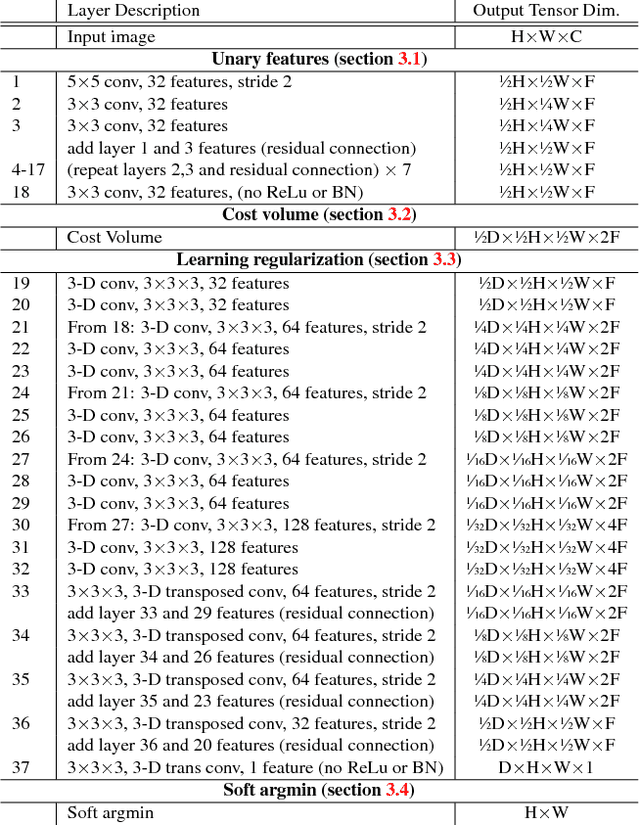
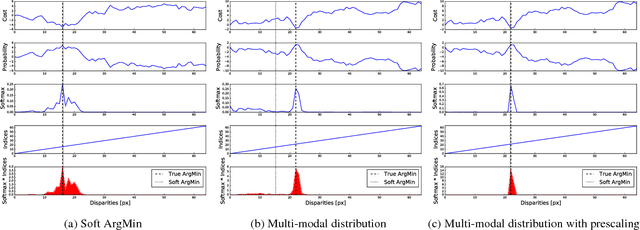
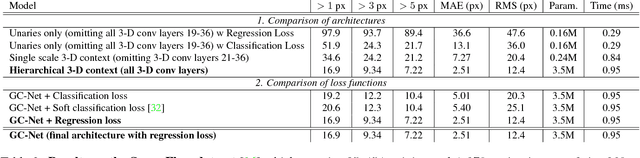
We propose a novel deep learning architecture for regressing disparity from a rectified pair of stereo images. We leverage knowledge of the problem's geometry to form a cost volume using deep feature representations. We learn to incorporate contextual information using 3-D convolutions over this volume. Disparity values are regressed from the cost volume using a proposed differentiable soft argmin operation, which allows us to train our method end-to-end to sub-pixel accuracy without any additional post-processing or regularization. We evaluate our method on the Scene Flow and KITTI datasets and on KITTI we set a new state-of-the-art benchmark, while being significantly faster than competing approaches.
Online Algorithms for Factorization-Based Structure from Motion
Jul 16, 2016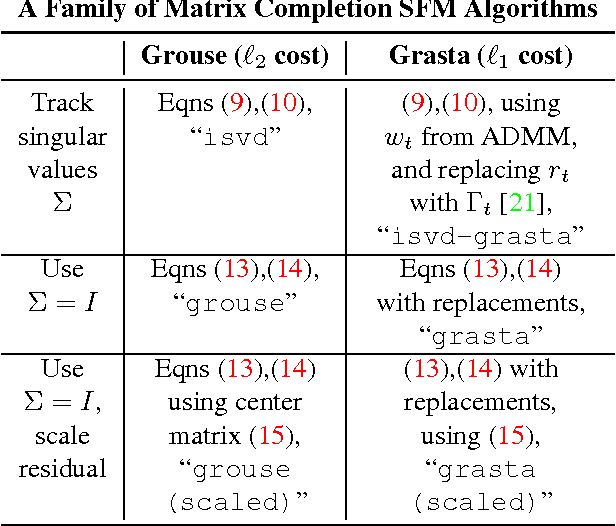
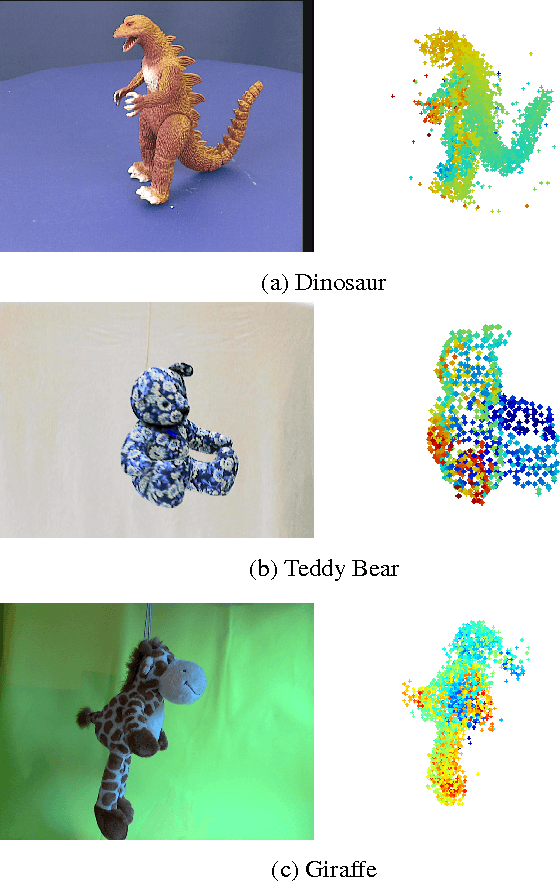
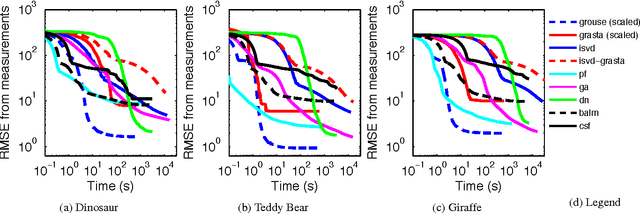
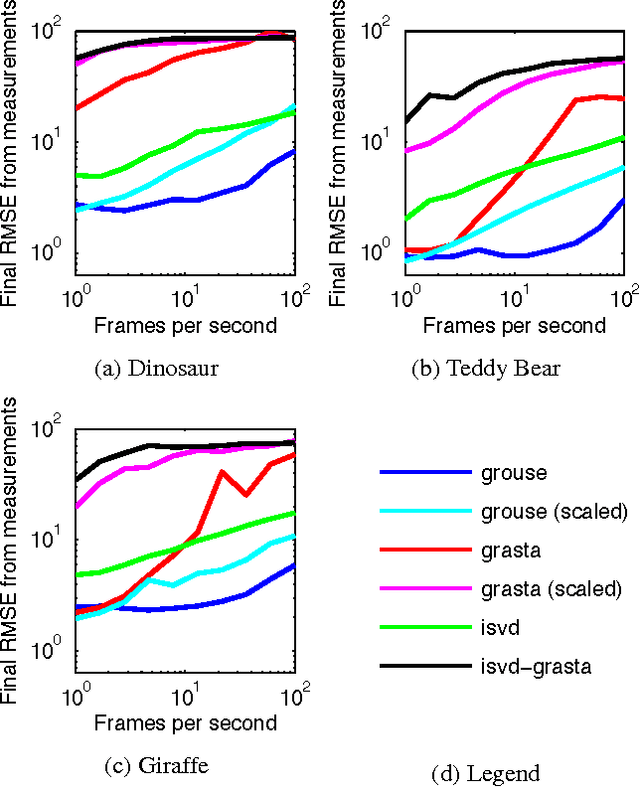
We present a family of online algorithms for real-time factorization-based structure from motion, leveraging a relationship between incremental singular value decomposition and recently proposed methods for online matrix completion. Our methods are orders of magnitude faster than previous state of the art, can handle missing data and a variable number of feature points, and are robust to noise and sparse outliers. We demonstrate our methods on both real and synthetic sequences and show that they perform well in both online and batch settings. We also provide an implementation which is able to produce 3D models in real time using a laptop with a webcam.
Machine learning of hierarchical clustering to segment 2D and 3D images
Jul 23, 2013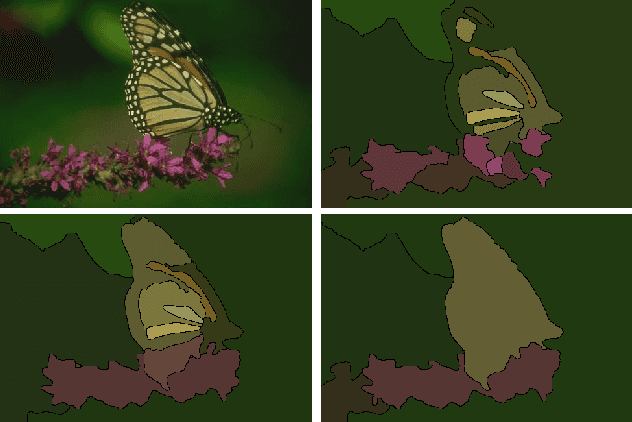
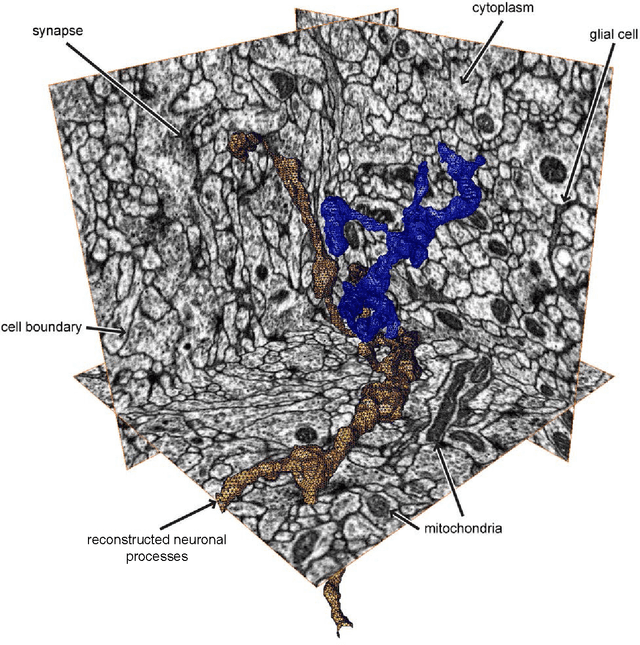
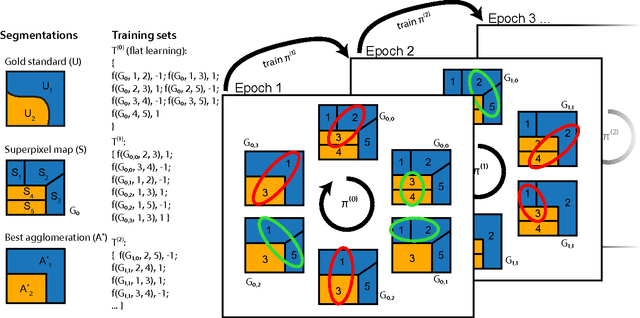
We aim to improve segmentation through the use of machine learning tools during region agglomeration. We propose an active learning approach for performing hierarchical agglomerative segmentation from superpixels. Our method combines multiple features at all scales of the agglomerative process, works for data with an arbitrary number of dimensions, and scales to very large datasets. We advocate the use of variation of information to measure segmentation accuracy, particularly in 3D electron microscopy (EM) images of neural tissue, and using this metric demonstrate an improvement over competing algorithms in EM and natural images.
* 15 pages, 8 figures