 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022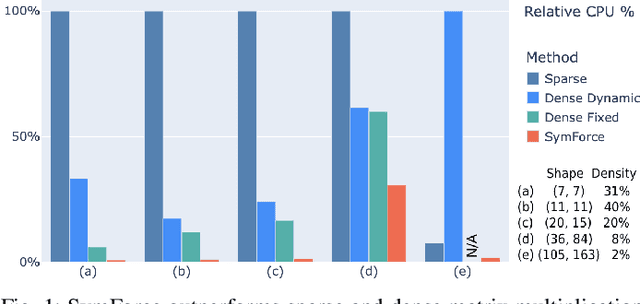
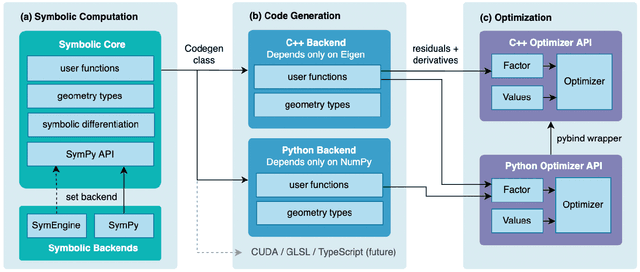
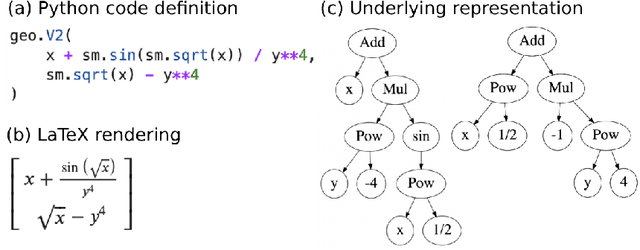
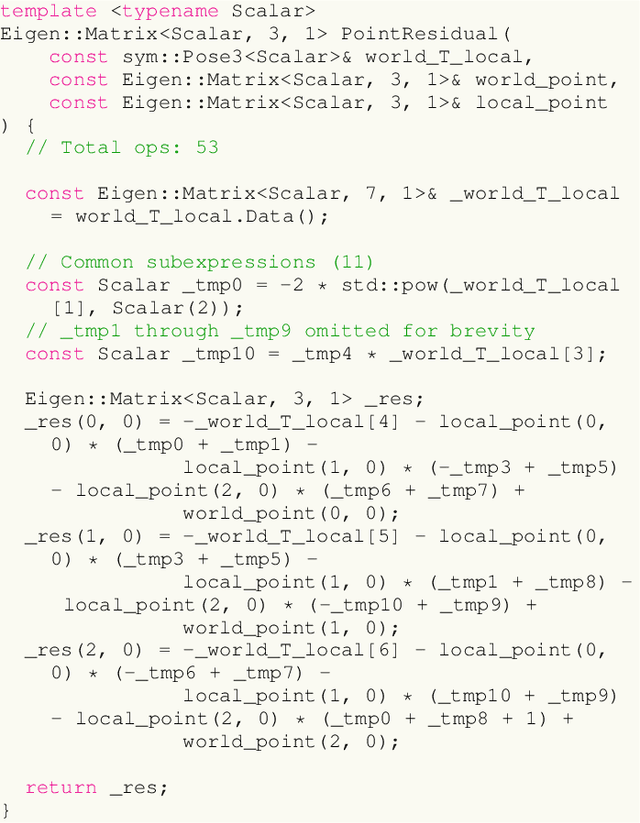
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .
Accurate Real Time Localization Tracking in A Clinical Environment using Bluetooth Low Energy and Deep Learning
Oct 15, 2018



Deep learning has started to revolutionize several different industries, and the applications of these methods in medicine are now becoming more commonplace. This study focuses on investigating the feasibility of tracking patients and clinical staff wearing Bluetooth Low Energy (BLE) tags in a radiation oncology clinic using artificial neural networks (ANNs) and convolutional neural networks (CNNs). The performance of these networks was compared to relative received signal strength indicator (RSSI) thresholding and triangulation. By utilizing temporal information, a combined CNN+ANN network was capable of correctly identifying the location of the BLE tag with an accuracy of 99.9%. It outperformed a CNN model (accuracy = 94%), a thresholding model employing majority voting (accuracy = 95%), and a triangulation classifier utilizing majority voting (accuracy = 95%). Future studies will seek to deploy this affordable real time location system in hospitals to improve clinical workflow, efficiency, and patient safety.
End-to-End Learning of Geometry and Context for Deep Stereo Regression
Mar 13, 2017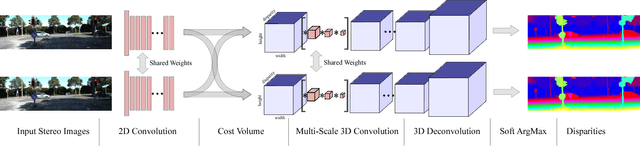
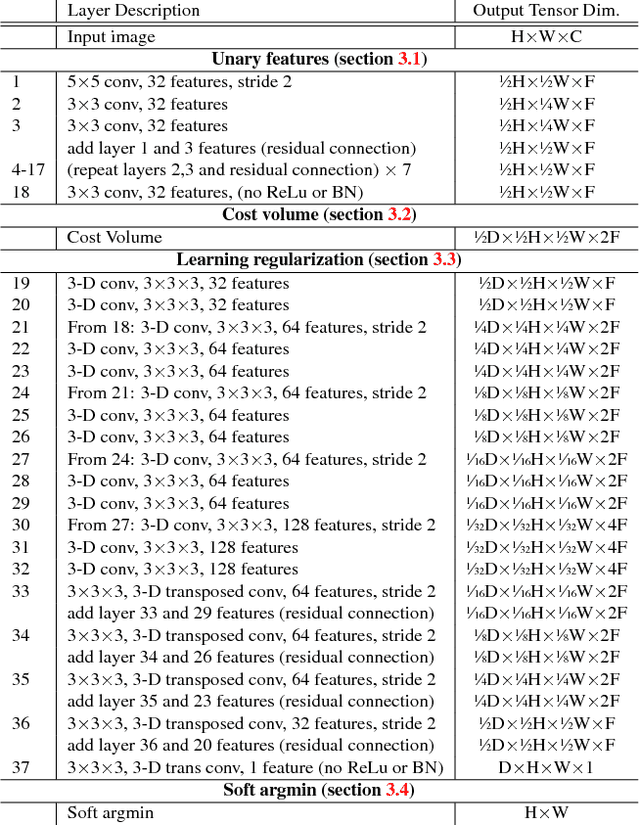
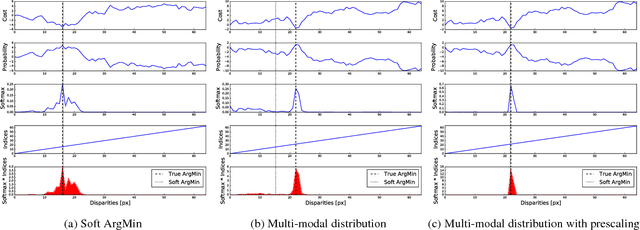
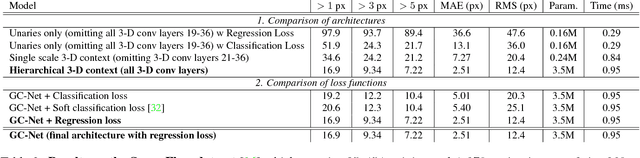
We propose a novel deep learning architecture for regressing disparity from a rectified pair of stereo images. We leverage knowledge of the problem's geometry to form a cost volume using deep feature representations. We learn to incorporate contextual information using 3-D convolutions over this volume. Disparity values are regressed from the cost volume using a proposed differentiable soft argmin operation, which allows us to train our method end-to-end to sub-pixel accuracy without any additional post-processing or regularization. We evaluate our method on the Scene Flow and KITTI datasets and on KITTI we set a new state-of-the-art benchmark, while being significantly faster than competing approaches.