 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Midair Reconfigurable Quadcopter using Unactuated Hinges
Paper and Code
Mar 30, 2021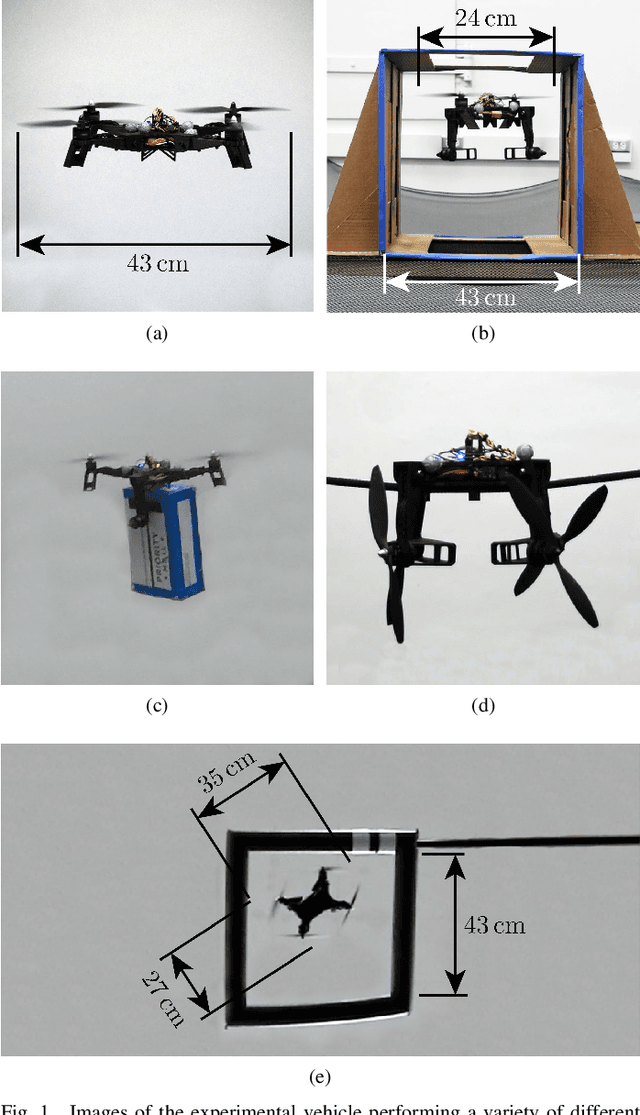
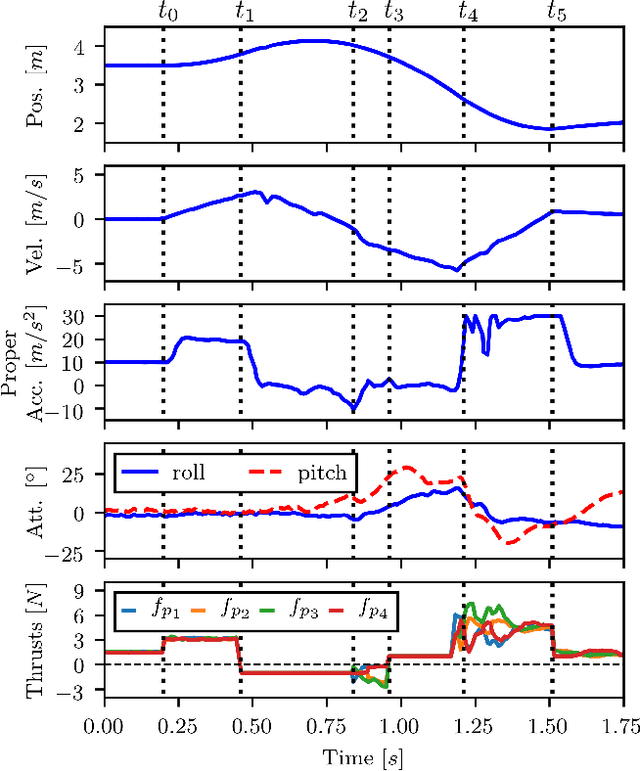
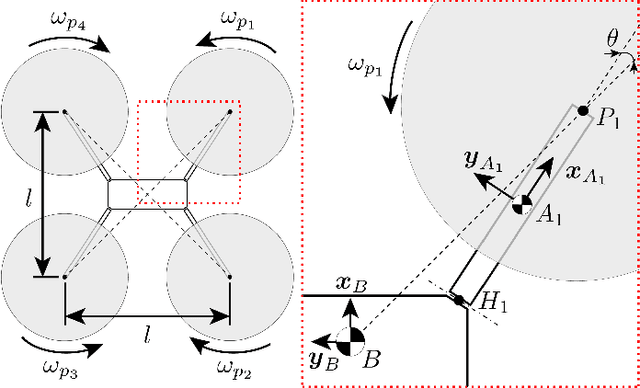

This paper presents the design and control of a novel quadcopter capable of changing shape mid-flight, allowing for operation in four configurations with the capability of sustained hover in three. The normally rigid connections between the arms of the quadcopter and the central body are replaced by free-rotating hinges that allow the arms to fold downward; no additional actuators beyond the four motors that drive the propellers are used. Configuration transitions are accomplished by either reducing or reversing the thrust forces produced by specific propellers during flight. Constraints placed on the control inputs of the vehicle prevent the arms from folding or unfolding unexpectedly, allowing for the use of existing quadcopter controllers and trajectory generation algorithms. For our experimental vehicle at hover, we find that these constraints result in a 36% reduction of the maximum yaw torque the vehicle can produce, but do not result in a reduction of the maximum thrust or roll and pitch torques. Furthermore, the ability to change configurations is shown to enable the vehicle to traverse small passages, perch on hanging wires, and perform simple grasping tasks.