 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-Inertial Odometry-enhanced Geometrically Stable ICP for Mapping Applications using Aerial Robots
Paper and Code
Jan 29, 2018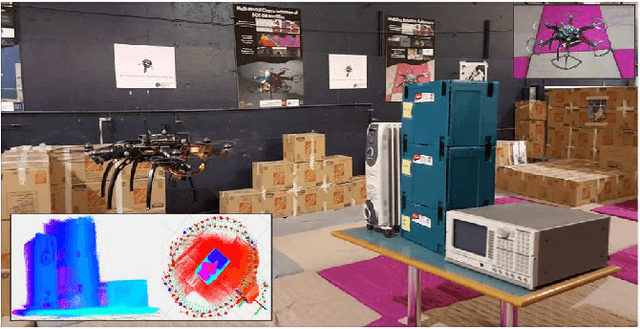
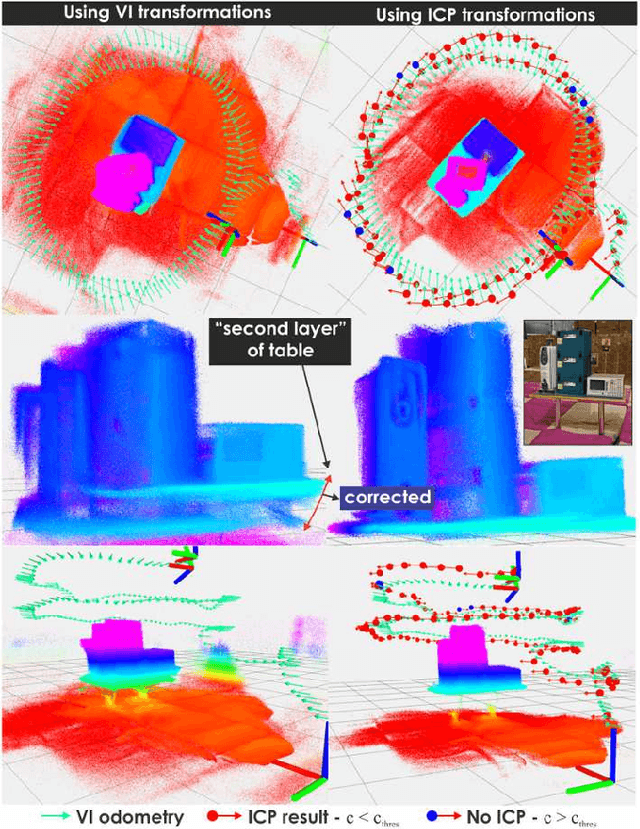
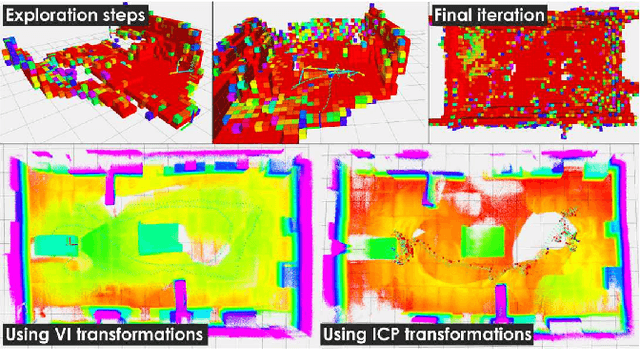

This paper presents a visual-inertial odometry-enhanced geometrically stable Iterative Closest Point (ICP) algorithm for accurate mapping using aerial robots. The proposed method employs a visual-inertial odometry framework in order to provide robust priors to the ICP step and calculate the overlap among point clouds derived from an onboard time-of-flight depth sensor. Within the overlapping parts of the point clouds, the method samples points such that the distribution of normals among them is as large as possible. As different geometries and sensor trajectories will influence the performance of the alignment process, evaluation of the expected geometric stability of the ICP step is conducted. It is only when this test is successful that the matching, outlier rejection, and minimization of the error metric ICP steps are conducted and the new relative translation and rotational components are estimated, otherwise the system relies on the visual-inertial odometry transformation estimates. The proposed strategy was evaluated within handheld, automated and fully autonomous exploration and mapping missions using a small aerial robot and was shown to provide robust results of superior quality at an affordable increase of the computational load.