 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Completion in Unseen Field Robotics Environments Using Extremely Sparse Depth Measurements
Feb 03, 2026Autonomous field robots operating in unstructured environments require robust perception to ensure safe and reliable operations. Recent advances in monocular depth estimation have demonstrated the potential of low-cost cameras as depth sensors; however, their adoption in field robotics remains limited due to the absence of reliable scale cues, ambiguous or low-texture conditions, and the scarcity of large-scale datasets. To address these challenges, we propose a depth completion model that trains on synthetic data and uses extremely sparse measurements from depth sensors to predict dense metric depth in unseen field robotics environments. A synthetic dataset generation pipeline tailored to field robotics enables the creation of multiple realistic datasets for training purposes. This dataset generation approach utilizes textured 3D meshes from Structure from Motion and photorealistic rendering with novel viewpoint synthesis to simulate diverse field robotics scenarios. Our approach achieves an end-to-end latency of 53 ms per frame on a Nvidia Jetson AGX Orin, enabling real-time deployment on embedded platforms. Extensive evaluation demonstrates competitive performance across diverse real-world field robotics scenarios.
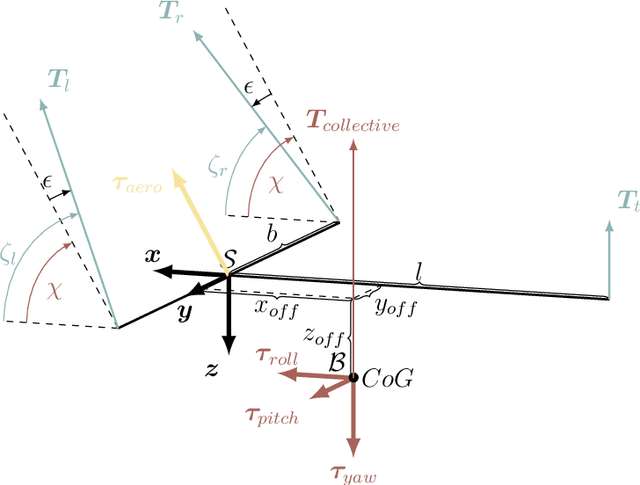
Allocation for Omnidirectional Aerial Robots: Incorporating Power Dynamics
Dec 20, 2024



Tilt-rotor aerial robots are more dynamic and versatile than their fixed-rotor counterparts, since the thrust vector and body orientation are decoupled. However, the coordination of servomotors and propellers (the allocation problem) is not trivial, especially accounting for overactuation and actuator dynamics. We present and compare different methods of actuator allocation for tilt-rotor platforms, evaluating them on a real aerial robot performing dynamic trajectories. We extend the state-of-the-art geometric allocation into a differential allocation, which uses the platform's redundancy and does not suffer from singularities typical of the geometric solution. We expand it by incorporating actuator dynamics and introducing propeller limit curves. These improve the modeling of propeller limits, automatically balancing their usage and allowing the platform to selectively activate and deactivate propellers during flight. We show that actuator dynamics and limits make the tuning of the allocation not only easier, but also allow it to track more dynamic oscillating trajectories with angular velocities up to 4 rad/s, compared to 2.8 rad/s of geometric methods.
Radar Meets Vision: Robustifying Monocular Metric Depth Prediction for Mobile Robotics
Oct 01, 2024



Mobile robots require accurate and robust depth measurements to understand and interact with the environment. While existing sensing modalities address this problem to some extent, recent research on monocular depth estimation has leveraged the information richness, yet low cost and simplicity of monocular cameras. These works have shown significant generalization capabilities, mainly in automotive and indoor settings. However, robots often operate in environments with limited scale cues, self-similar appearances, and low texture. In this work, we encode measurements from a low-cost mmWave radar into the input space of a state-of-the-art monocular depth estimation model. Despite the radar's extreme point cloud sparsity, our method demonstrates generalization and robustness across industrial and outdoor experiments. Our approach reduces the absolute relative error of depth predictions by 9-64% across a range of unseen, real-world validation datasets. Importantly, we maintain consistency of all performance metrics across all experiments and scene depths where current vision-only approaches fail. We further address the present deficit of training data in mobile robotics environments by introducing a novel methodology for synthesizing rendered, realistic learning datasets based on photogrammetric data that simulate the radar sensor observations for training. Our code, datasets, and pre-trained networks are made available at https://github.com/ethz-asl/radarmeetsvision.
Pushing the Limits of Reactive Planning: Learning to Escape Local Minima
Jul 18, 2024



When does a robot planner need a map? Reactive methods that use only the robot's current sensor data and local information are fast and flexible, but prone to getting stuck in local minima. Is there a middle-ground between fully reactive methods and map-based path planners? In this paper, we investigate feed forward and recurrent networks to augment a purely reactive sensor-based planner, which should give the robot geometric intuition about how to escape local minima. We train on a large number of extremely cluttered worlds auto-generated from primitive shapes, and show that our system zero-shot transfers to real 3D man-made environments, and can handle up to 30% sensor noise without degeneration of performance. We also offer a discussion of what role network memory plays in our final system, and what insights can be drawn about the nature of reactive vs. map-based navigation.
Task Adaptation in Industrial Human-Robot Interaction: Leveraging Riemannian Motion Policies
Jun 25, 2024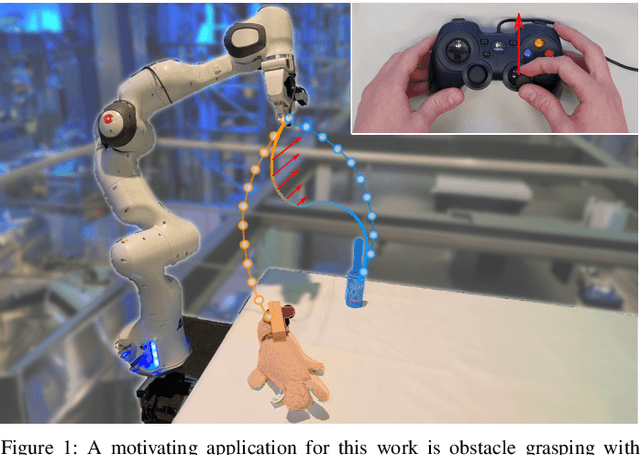
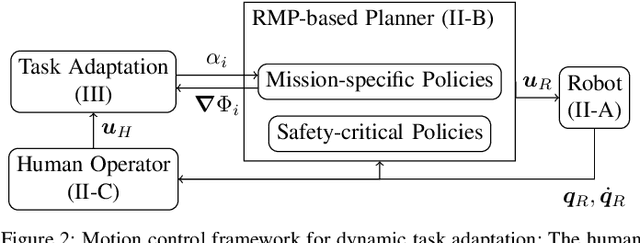
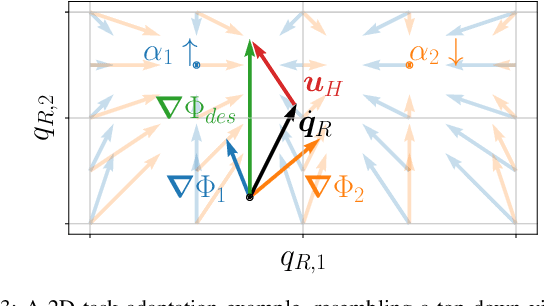
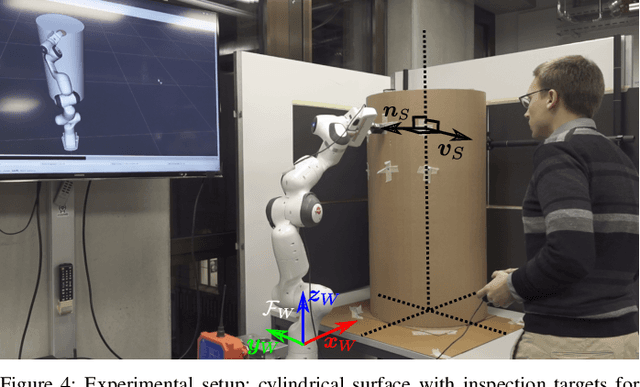
In real-world industrial environments, modern robots often rely on human operators for crucial decision-making and mission synthesis from individual tasks. Effective and safe collaboration between humans and robots requires systems that can adjust their motion based on human intentions, enabling dynamic task planning and adaptation. Addressing the needs of industrial applications, we propose a motion control framework that (i) removes the need for manual control of the robot's movement; (ii) facilitates the formulation and combination of complex tasks; and (iii) allows the seamless integration of human intent recognition and robot motion planning. For this purpose, we leverage a modular and purely reactive approach for task parametrization and motion generation, embodied by Riemannian Motion Policies. The effectiveness of our method is demonstrated, evaluated, and compared to \remove{state-of-the-art approaches}\add{a representative state-of-the-art approach} in experimental scenarios inspired by realistic industrial Human-Robot Interaction settings.
* 9 pages; Robotics, Science and Systems (RSS) 2024
Multi-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
May 29, 2024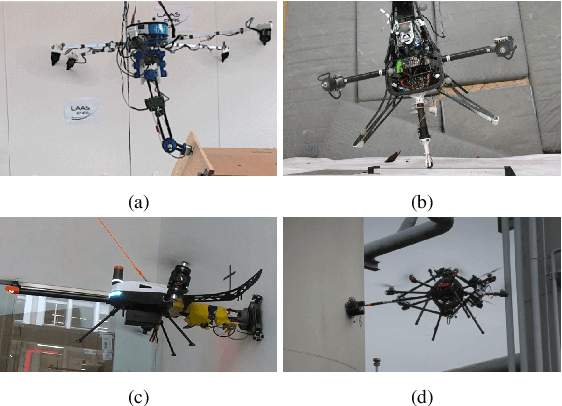
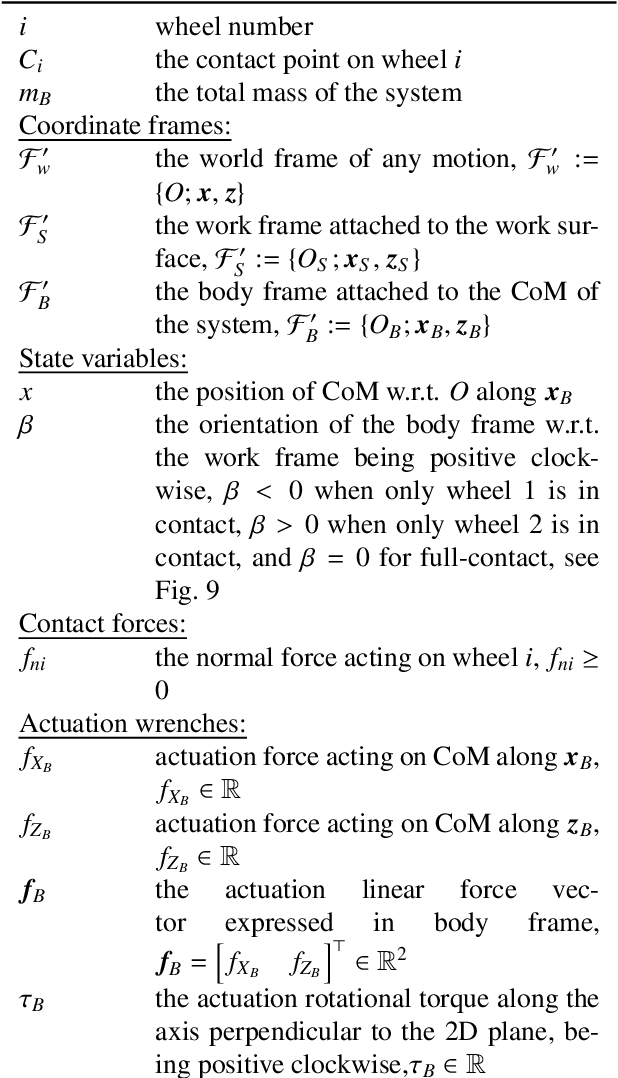
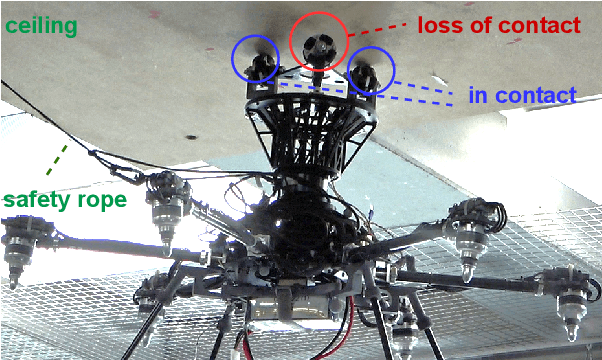
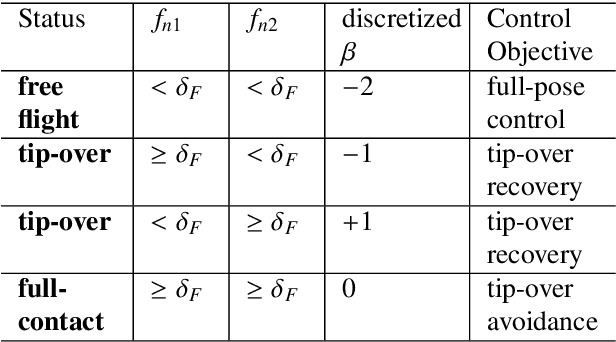
Push-and-slide tasks carried out by fully-actuated aerial robots can be used for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Often, an end-effector based on multiple non-actuated contact wheels is used to contact the surface. This approach entails challenges in ensuring consistent wheel contact with a surface whose exact orientation and location might be uncertain due to sensor aliasing and drift. Using a standard full-pose controller dependent on the inaccurate surface position and orientation may cause wheels to lose contact during sliding, and subsequently lead to robot tip-over. To address the tip-over issue, we present two approaches: (1) tip-over avoidance guidelines for hardware design, and (2) control for tip-over recovery and avoidance. Physical experiments with a fully-actuated aerial vehicle were executed for a push-and-slide task on a flat surface. The resulting data is used in deriving tip-over avoidance guidelines and designing a simulator that closely captures real-world conditions. We then use the simulator to test the effectiveness and robustness of the proposed approaches in risky scenarios against uncertainties.
Waverider: Leveraging Hierarchical, Multi-Resolution Maps for Efficient and Reactive Obstacle Avoidance
May 22, 2024



Fast and reliable obstacle avoidance is an important task for mobile robots. In this work, we propose an efficient reactive system that provides high-quality obstacle avoidance while running at hundreds of hertz with minimal resource usage. Our approach combines wavemap, a hierarchical volumetric map representation, with a novel hierarchical and parallelizable obstacle avoidance algorithm formulated through Riemannian Motion Policies (RMP). Leveraging multi-resolution obstacle avoidance policies, the proposed navigation system facilitates precise, low-latency (36ms), and extremely efficient obstacle avoidance with a very large perceptive radius (30m). We perform extensive statistical evaluations on indoor and outdoor maps, verifying that the proposed system compares favorably to fixed-resolution RMP variants and CHOMP. Finally, the RMP formulation allows the seamless fusion of obstacle avoidance with additional objectives, such as goal-seeking, to obtain a fully-fledged navigation system that is versatile and robust. We deploy the system on a Micro Aerial Vehicle and show how it navigates through an indoor obstacle course. Our complete implementation, called waverider, is made available as open source.
Passive Aligning Physical Interaction of Fully-Actuated Aerial Vehicles for Pushing Tasks
Feb 27, 2024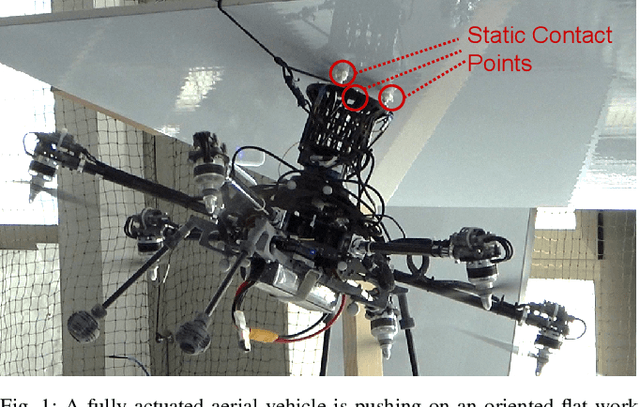
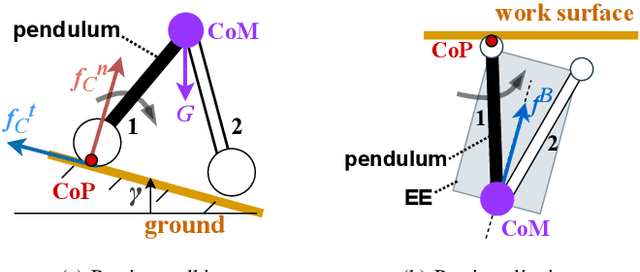
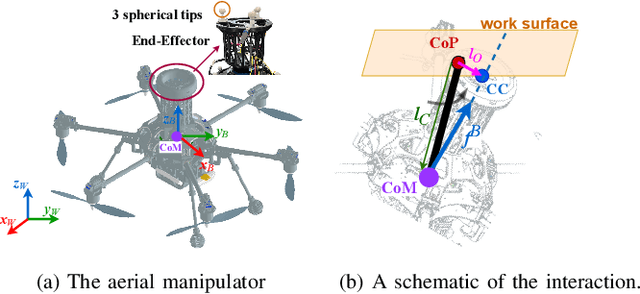
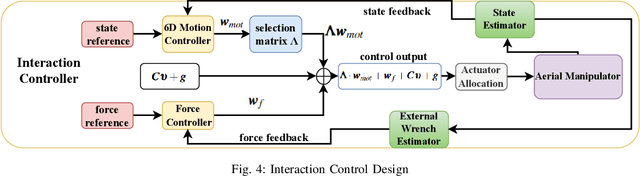
Recently, the utilization of aerial manipulators for performing pushing tasks in non-destructive testing (NDT) applications has seen significant growth. Such operations entail physical interactions between the aerial robotic system and the environment. End-effectors with multiple contact points are often used for placing NDT sensors in contact with a surface to be inspected. Aligning the NDT sensor and the work surface while preserving contact, requires that all available contact points at the end-effector tip are in contact with the work surface. With a standard full-pose controller, attitude errors often occur due to perturbations caused by modeling uncertainties, sensor noise, and environmental uncertainties. Even small attitude errors can cause a loss of contact points between the end-effector tip and the work surface. To preserve full alignment amidst these uncertainties, we propose a control strategy which selectively deactivates angular motion control and enables direct force control in specific directions. In particular, we derive two essential conditions to be met, such that the robot can passively align with flat work surfaces achieving full alignment through the rotation along non-actively controlled axes. Additionally, these conditions serve as hardware design and control guidelines for effectively integrating the proposed control method for practical usage. Real world experiments are conducted to validate both the control design and the guidelines.
To Fuse or Not to Fuse: Measuring Consistency in Multi-Sensor Fusion for Aerial Robots
Dec 22, 2023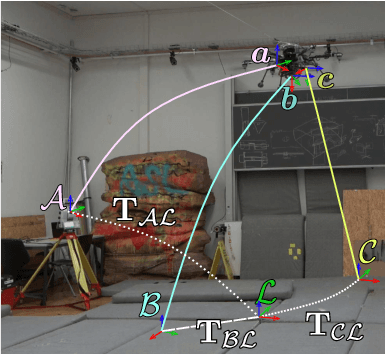
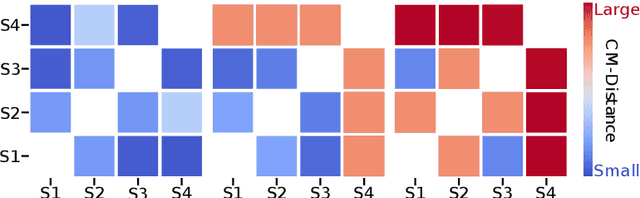
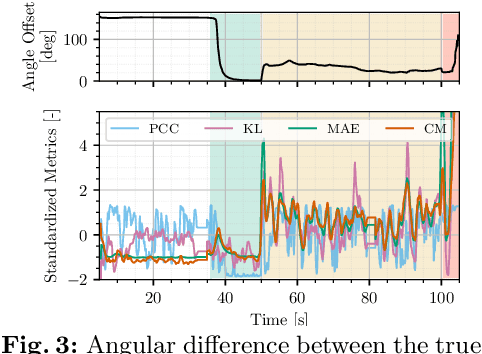
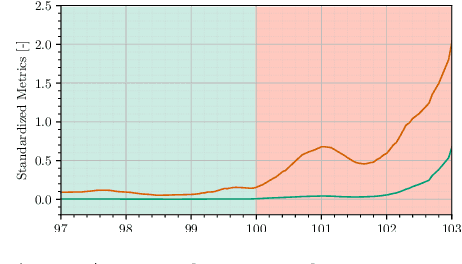
Aerial vehicles are no longer limited to flying in open space: recent work has focused on aerial manipulation and up-close inspection. Such applications place stringent requirements on state estimation: the robot must combine state information from many sources, including onboard odometry and global positioning sensors. However, flying close to or in contact with structures is a degenerate case for many sensing modalities, and the robot's state estimation framework must intelligently choose which sensors are currently trustworthy. We evaluate a number of metrics to judge the reliability of sensing modalities in a multi-sensor fusion framework, then introduce a consensus-finding scheme that uses this metric to choose which sensors to fuse or not to fuse. Finally, we show that such a fusion framework is more robust and accurate than fusing all sensors all the time and demonstrate how such metrics can be informative in real-world experiments in indoor-outdoor flight and bridge inspection.
Soliro -- a hybrid dynamic tilt-wing aerial manipulator with minimal actuators
Dec 08, 2023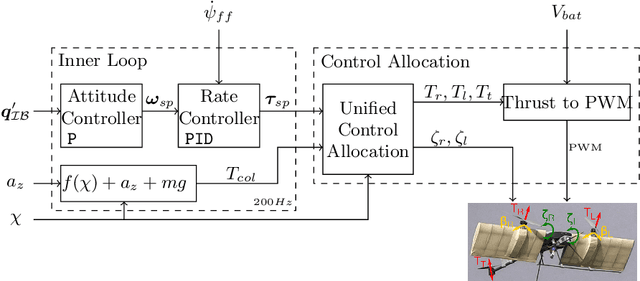
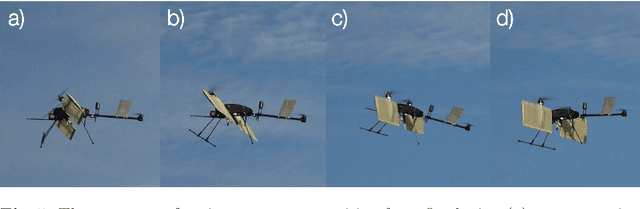
The ability to enter in contact with and manipulate physical objects with a flying robot enables many novel applications, such as contact inspection, painting, drilling, and sample collection. Generally, these aerial robots need more degrees of freedom than a standard quadrotor. While there is active research of over-actuated, omnidirectional MAVs and aerial manipulators as well as VTOL and hybrid platforms, the two concepts have not been combined. We address the problem of conceptualization, characterization, control, and testing of a 5DOF rotary-/fixed-wing hybrid, tilt-rotor, split tilt-wing, nearly omnidirectional aerial robot. We present an elegant solution with a minimal set of actuators and that does not need any classical control surfaces or flaps. The concept is validated in a wind tunnel study and in multiple flights with forward and backward transitions. Fixed-wing flight speeds up to 10 m/s were reached, with a power reduction of 30% as compared to rotary wing flight.