 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA robust baro-radar-inertial odometry m-estimator for multicopter navigation in cities and forests
Aug 11, 2024



Search and rescue operations require mobile robots to navigate unstructured indoor and outdoor environments. In particular, actively stabilized multirotor drones need precise movement data to balance and avoid obstacles. Combining radial velocities from on-chip radar with MEMS inertial sensing has proven to provide robust, lightweight, and consistent state estimation, even in visually or geometrically degraded environments. Statistical tests robustify these estimators against radar outliers. However, available work with binary outlier filters lacks adaptability to various hardware setups and environments. Other work has predominantly been tested in handheld static environments or automotive contexts. This work introduces a robust baro-radar-inertial odometry (BRIO) m-estimator for quadcopter flights in typical GNSS-denied scenarios. Extensive real-world closed-loop flights in cities and forests demonstrate robustness to moving objects and ghost targets, maintaining a consistent performance with 0.5 % to 3.2 % drift per distance traveled. Benchmarks on public datasets validate the system's generalizability. The code, dataset, and video are available at https://github.com/ethz-asl/rio.
Task Adaptation in Industrial Human-Robot Interaction: Leveraging Riemannian Motion Policies
Jun 25, 2024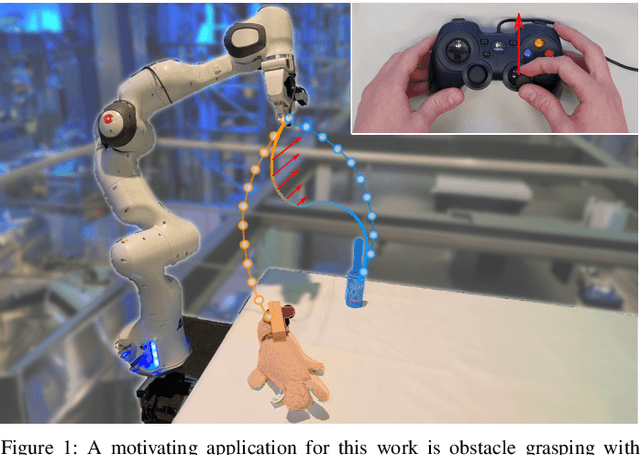
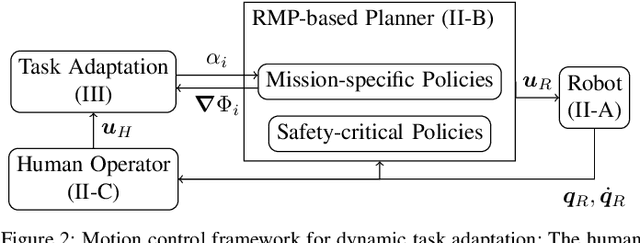
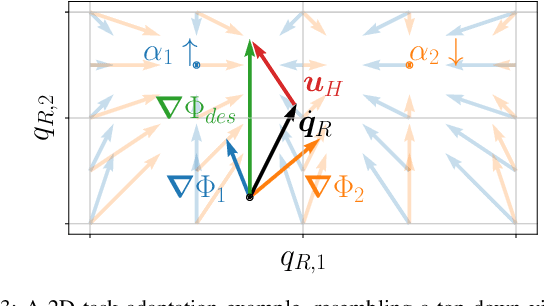
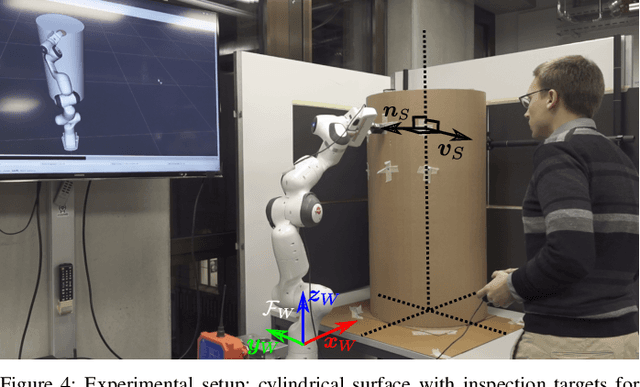
In real-world industrial environments, modern robots often rely on human operators for crucial decision-making and mission synthesis from individual tasks. Effective and safe collaboration between humans and robots requires systems that can adjust their motion based on human intentions, enabling dynamic task planning and adaptation. Addressing the needs of industrial applications, we propose a motion control framework that (i) removes the need for manual control of the robot's movement; (ii) facilitates the formulation and combination of complex tasks; and (iii) allows the seamless integration of human intent recognition and robot motion planning. For this purpose, we leverage a modular and purely reactive approach for task parametrization and motion generation, embodied by Riemannian Motion Policies. The effectiveness of our method is demonstrated, evaluated, and compared to \remove{state-of-the-art approaches}\add{a representative state-of-the-art approach} in experimental scenarios inspired by realistic industrial Human-Robot Interaction settings.
* 9 pages; Robotics, Science and Systems (RSS) 2024
Safe Low-Altitude Navigation in Steep Terrain with Fixed-Wing Aerial Vehicles
Jan 09, 2024



Fixed-wing aerial vehicles provide an efficient way to navigate long distances or cover large areas for environmental monitoring applications. By design, they also require large open spaces due to limited maneuverability. However, strict regulatory and safety altitude limits constrain the available space. Especially in complex, confined, or steep terrain, ensuring the vehicle does not enter an inevitable collision state(ICS) can be challenging. In this work, we propose a strategy to find safe paths that do not enter an ICS while navigating within tight altitude constraints. The method uses periodic paths to efficiently classify ICSs. A sampling-based planner creates collision-free and kinematically feasible paths that begin and end in safe periodic (circular) paths. We show that, in realistic terrain, using circular periodic paths can simplify the goal selection process by making it yaw agnostic and constraining yaw. We demonstrate our approach by dynamically planning safe paths in real-time while navigating steep terrain on a flight test in complex alpine terrain.