 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAllocation for Omnidirectional Aerial Robots: Incorporating Power Dynamics
Dec 20, 2024



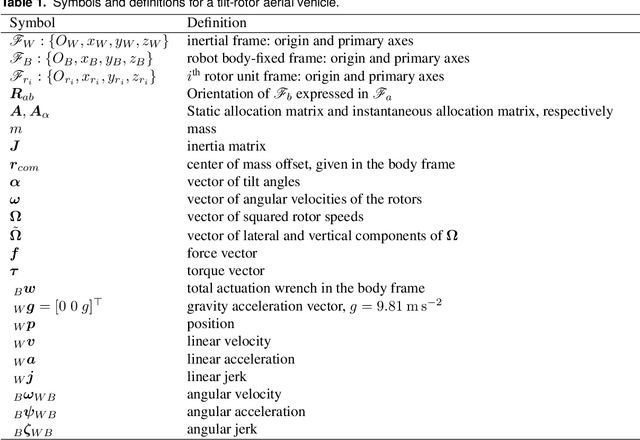
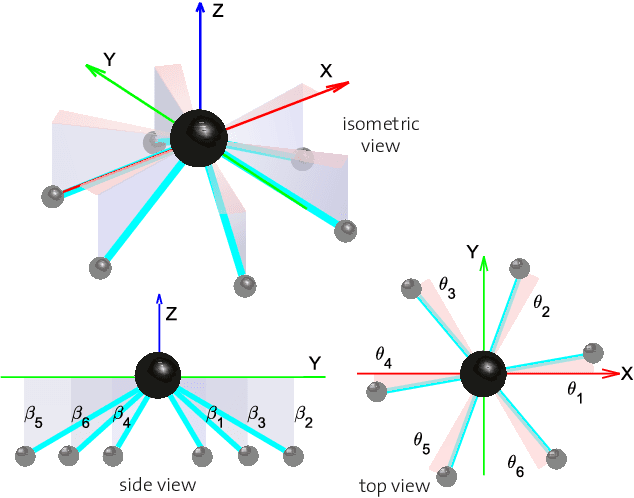
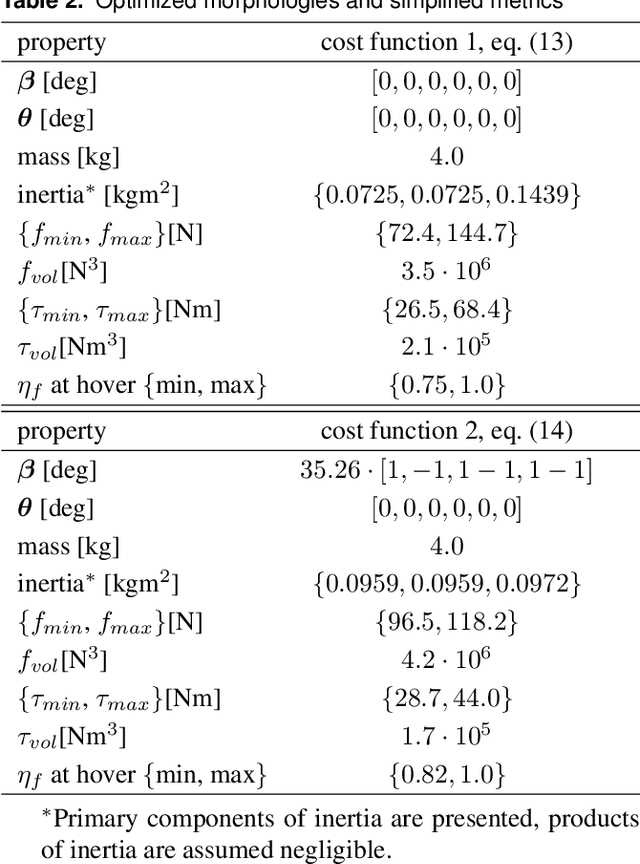
Tilt-rotor aerial robots are more dynamic and versatile than their fixed-rotor counterparts, since the thrust vector and body orientation are decoupled. However, the coordination of servomotors and propellers (the allocation problem) is not trivial, especially accounting for overactuation and actuator dynamics. We present and compare different methods of actuator allocation for tilt-rotor platforms, evaluating them on a real aerial robot performing dynamic trajectories. We extend the state-of-the-art geometric allocation into a differential allocation, which uses the platform's redundancy and does not suffer from singularities typical of the geometric solution. We expand it by incorporating actuator dynamics and introducing propeller limit curves. These improve the modeling of propeller limits, automatically balancing their usage and allowing the platform to selectively activate and deactivate propellers during flight. We show that actuator dynamics and limits make the tuning of the allocation not only easier, but also allow it to track more dynamic oscillating trajectories with angular velocities up to 4 rad/s, compared to 2.8 rad/s of geometric methods.
Evaluation of Human-Robot Interfaces based on 2D/3D Visual and Haptic Feedback for Aerial Manipulation
Oct 20, 2024



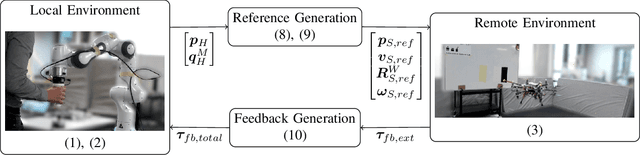
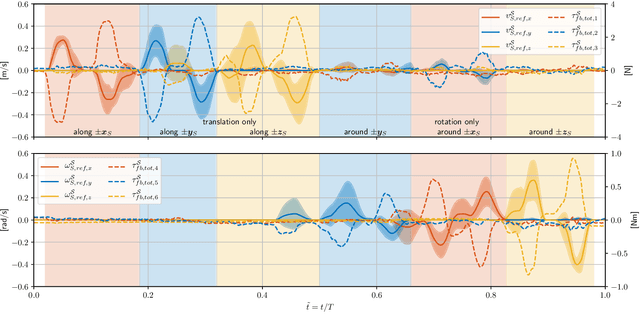
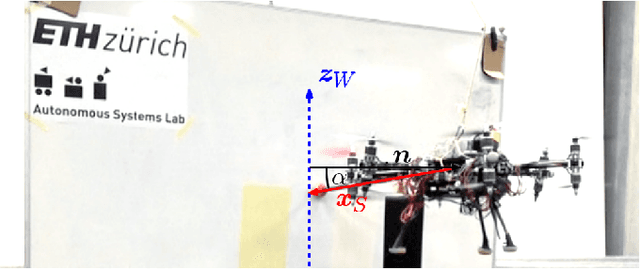
Most telemanipulation systems for aerial robots provide the operator with only 2D screen visual information. The lack of richer information about the robot's status and environment can limit human awareness and, in turn, task performance. While the pilot's experience can often compensate for this reduced flow of information, providing richer feedback is expected to reduce the cognitive workload and offer a more intuitive experience overall. This work aims to understand the significance of providing additional pieces of information during aerial telemanipulation, namely (i) 3D immersive visual feedback about the robot's surroundings through mixed reality (MR) and (ii) 3D haptic feedback about the robot interaction with the environment. To do so, we developed a human-robot interface able to provide this information. First, we demonstrate its potential in a real-world manipulation task requiring sub-centimeter-level accuracy. Then, we evaluate the individual effect of MR vision and haptic feedback on both dexterity and workload through a human subjects study involving a virtual block transportation task. Results show that both 3D MR vision and haptic feedback improve the operator's dexterity in the considered teleoperated aerial interaction tasks. Nevertheless, pilot experience remains the most significant factor.
Task Adaptation in Industrial Human-Robot Interaction: Leveraging Riemannian Motion Policies
Jun 25, 2024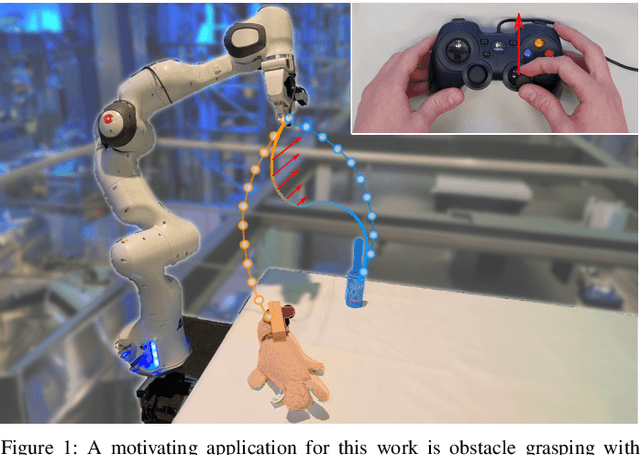
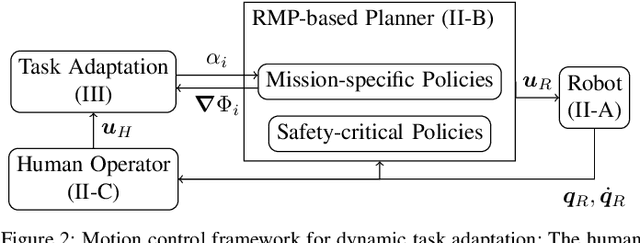
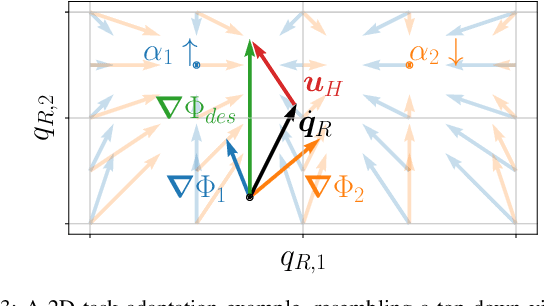
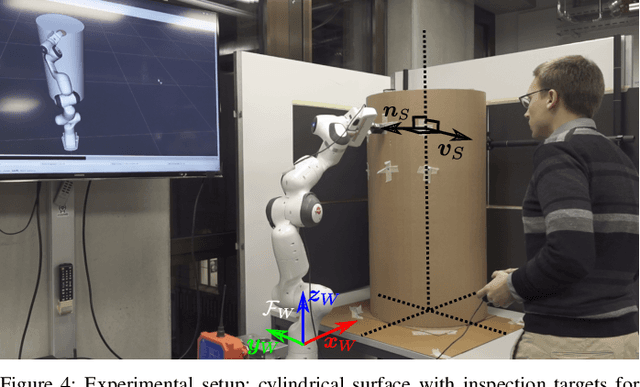
In real-world industrial environments, modern robots often rely on human operators for crucial decision-making and mission synthesis from individual tasks. Effective and safe collaboration between humans and robots requires systems that can adjust their motion based on human intentions, enabling dynamic task planning and adaptation. Addressing the needs of industrial applications, we propose a motion control framework that (i) removes the need for manual control of the robot's movement; (ii) facilitates the formulation and combination of complex tasks; and (iii) allows the seamless integration of human intent recognition and robot motion planning. For this purpose, we leverage a modular and purely reactive approach for task parametrization and motion generation, embodied by Riemannian Motion Policies. The effectiveness of our method is demonstrated, evaluated, and compared to \remove{state-of-the-art approaches}\add{a representative state-of-the-art approach} in experimental scenarios inspired by realistic industrial Human-Robot Interaction settings.
* 9 pages; Robotics, Science and Systems (RSS) 2024
A perching and tilting aerial robot for precise and versatile power tool work on vertical walls
Oct 16, 2023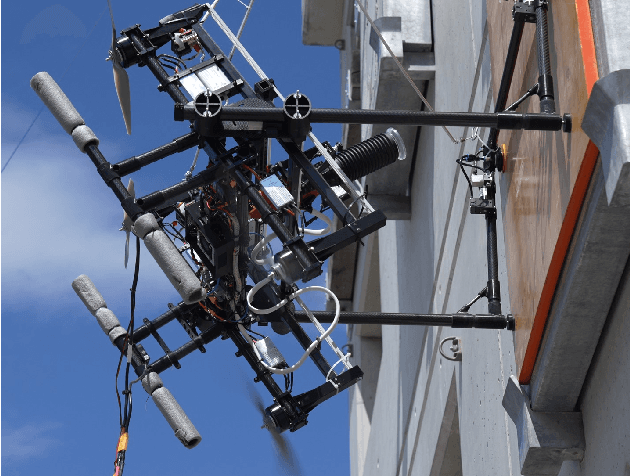
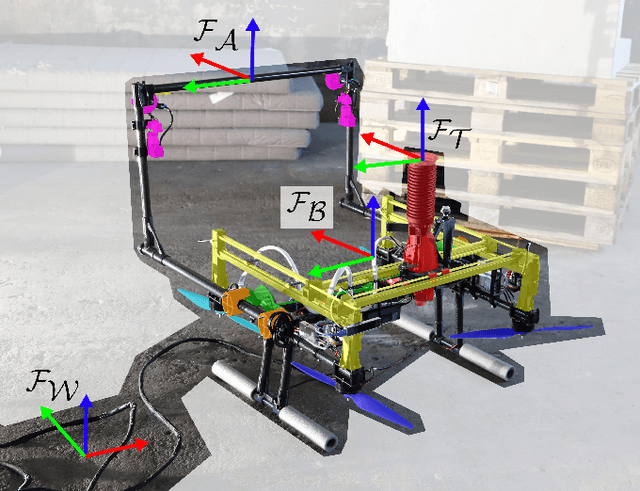
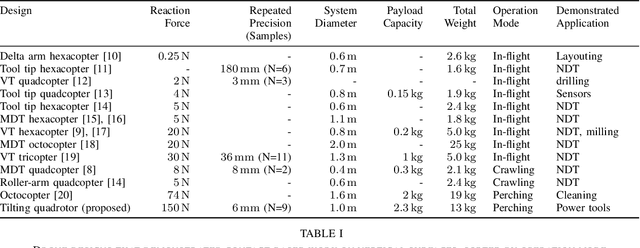
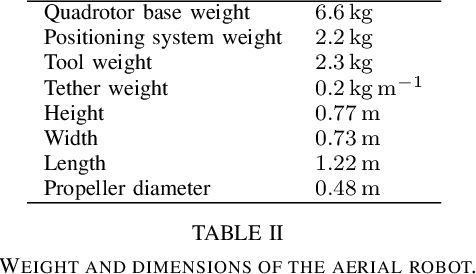
Drilling, grinding, and setting anchors on vertical walls are fundamental processes in everyday construction work. Manually doing these works is error-prone, potentially dangerous, and elaborate at height. Today, heavy mobile ground robots can perform automatic power tool work. However, aerial vehicles could be deployed in untraversable environments and reach inaccessible places. Existing drone designs do not provide the large forces, payload, and high precision required for using power tools. This work presents the first aerial robot design to perform versatile manipulation tasks on vertical concrete walls with continuous forces of up to 150 N. The platform combines a quadrotor with active suction cups for perching on walls and a lightweight, tiltable linear tool table. This combination minimizes weight using the propulsion system for flying, surface alignment, and feed during manipulation and allows precise positioning of the power tool. We evaluate our design in a concrete drilling application - a challenging construction process that requires high forces, accuracy, and precision. In 30 trials, our design can accurately pinpoint a target position despite perching imprecision. Nine visually guided drilling experiments demonstrate a drilling precision of 6 mm without further automation. Aside from drilling, we also demonstrate the versatility of the design by setting an anchor into concrete.
Towards 6DoF Bilateral Teleoperation of an Omnidirectional Aerial Vehicle for Aerial Physical Interaction
Mar 07, 2022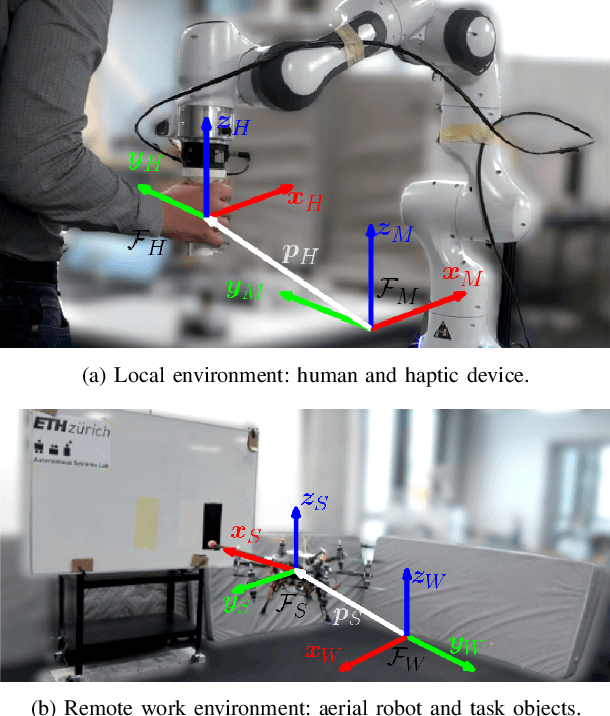
Bilateral teleoperation offers an intriguing solution towards shared autonomy with aerial vehicles in contact-based inspection and manipulation tasks. Omnidirectional aerial robots allow for full pose operations, making them particularly attractive in such tasks. Naturally, the question arises whether standard bilateral teleoperation methodologies are suitable for use with these vehicles. In this work, a fully decoupled 6DoF bilateral teleoperation framework for aerial physical interaction is designed and tested for the first time. The method is based on the well established rate control, recentering and interaction force feedback policy. However, practical experiments evince the difficulty of performing decoupled motions in a single axis only. As such, this work shows that the trivial extension of standard methods is insufficient for omnidirectional teleoperation, due to the operators physical inability to properly decouple all input DoFs. This suggests that further studies on enhanced haptic feedback are necessary.
Human-State-Aware Controller for a Tethered Aerial Robot Guiding a Human by Physical Interaction
Mar 07, 2022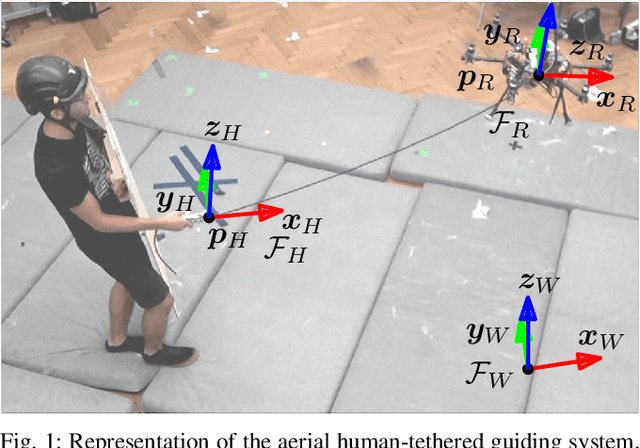


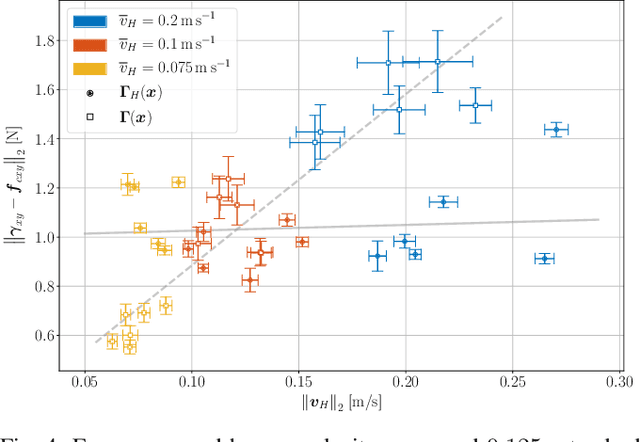
With the rapid development of Aerial Physical Interaction, the possibility to have aerial robots physically interacting with humans is attracting a growing interest. In one of our previous works, we considered one of the first systems in which a human is physically connected to an aerial vehicle by a cable. There, we developed a compliant controller that allows the robot to pull the human toward a desired position using forces only as an indirect communication-channel. However, this controller is based on the robot-state only, which makes the system not adaptable to the human behavior, and in particular to their walking speed. This reduces the effectiveness and comfort of the guidance when the human is still far from the desired point. In this paper, we formally analyze the problem and propose a human-state-aware controller that includes a human`s velocity feedback. We theoretically prove and experimentally show that this method provides a more consistent guiding force which enhances the guiding experience.
Modeling and Control of an Omnidirectional Micro Aerial Vehicle Equipped with a Soft Robotic Arm
Nov 04, 2021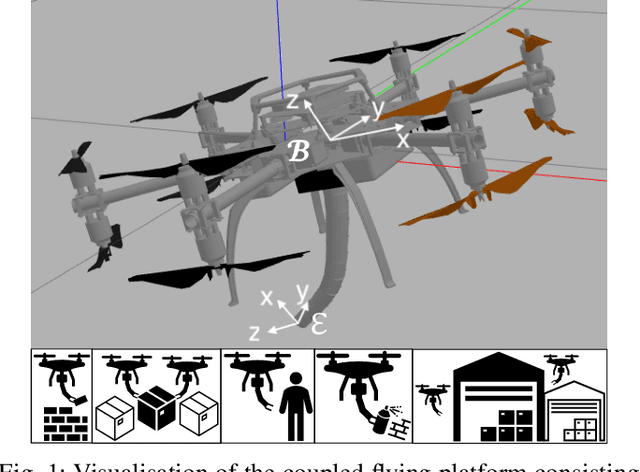



Flying manipulators are aerial drones with attached rigid-bodied robotic arms and belong to the latest and most actively developed research areas in robotics. The rigid nature of these arms often lack compliance, flexibility, and smoothness in movement. This work proposes to use a soft-bodied robotic arm attached to an omnidirectional micro aerial vehicle (OMAV) to leverage the compliant and flexible behavior of the arm, while remaining maneuverable and dynamic thanks to the omnidirectional drone as the floating base. The unification of the arm with the drone poses challenges in the modeling and control of such a combined platform; these challenges are addressed with this work. We propose a unified model for the flying manipulator based on three modeling principles: the Piecewise Constant Curvature (PCC) and Augmented Rigid Body Model (ARBM) hypotheses for modeling soft continuum robots and a floating-base approach borrowed from the traditional rigid-body robotics literature. To demonstrate the validity and usefulness of this parametrisation, a hierarchical model-based feedback controller is implemented. The controller is verified and evaluated in simulation on various dynamical tasks, where the nullspace motions, disturbance recovery, and trajectory tracking capabilities of the platform are examined and validated. The soft flying manipulator platform could open new application fields in aerial construction, goods delivery, human assistance, maintenance, and warehouse automation.
Modelling and Estimation of Human Walking Gait for Physical Human-Robot Interaction
Aug 27, 2021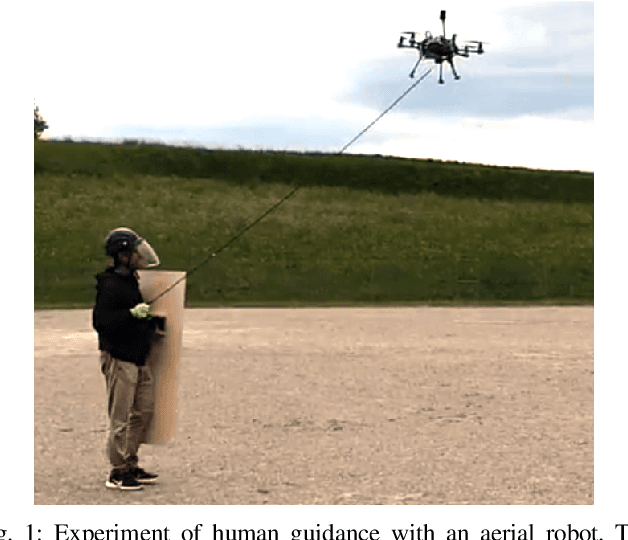
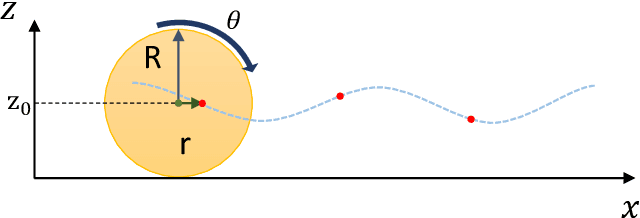
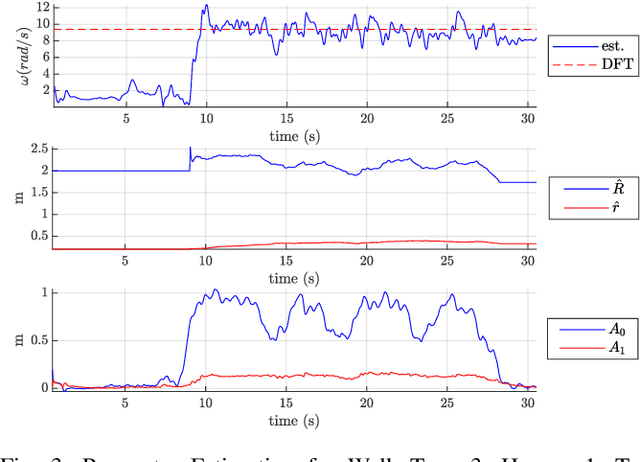
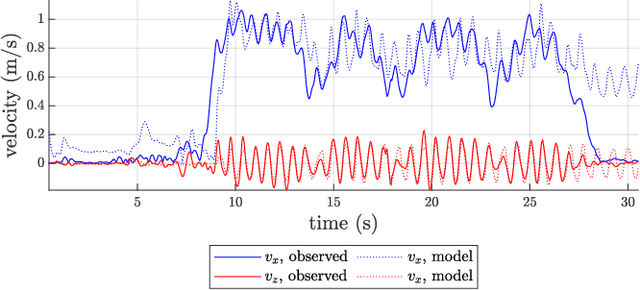
An approach to model and estimate human walking kinematics in real-time for Physical Human-Robot Interaction is presented. The human gait velocity along the forward and vertical direction of motion is modelled according to the Yoyo-model. We designed an Extended Kalman Filter (EKF) algorithm to estimate the frequency, bias and trigonometric state of a biased sinusoidal signal, from which the kinematic parameters of the Yoyo-model can be extracted. Quality and robustness of the estimation are improved by opportune filtering based on heuristics. The approach is successfully evaluated on a real dataset of walking humans, including complex trajectories and changing step frequency over time.
Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.