 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA perching and tilting aerial robot for precise and versatile power tool work on vertical walls
Oct 16, 2023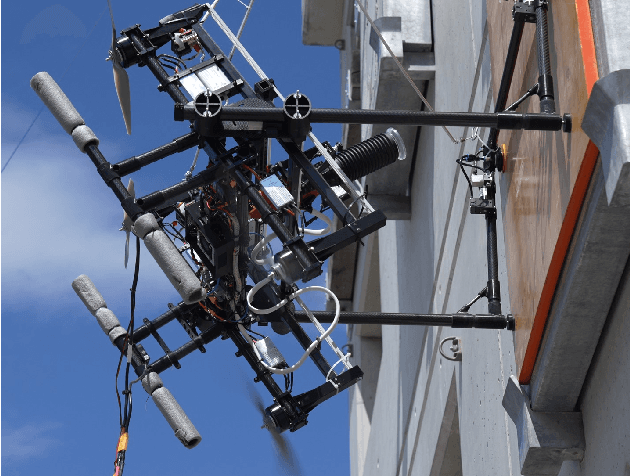
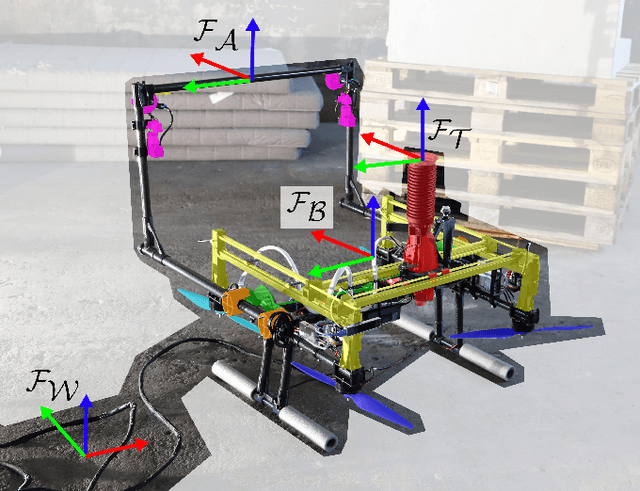
Drilling, grinding, and setting anchors on vertical walls are fundamental processes in everyday construction work. Manually doing these works is error-prone, potentially dangerous, and elaborate at height. Today, heavy mobile ground robots can perform automatic power tool work. However, aerial vehicles could be deployed in untraversable environments and reach inaccessible places. Existing drone designs do not provide the large forces, payload, and high precision required for using power tools. This work presents the first aerial robot design to perform versatile manipulation tasks on vertical concrete walls with continuous forces of up to 150 N. The platform combines a quadrotor with active suction cups for perching on walls and a lightweight, tiltable linear tool table. This combination minimizes weight using the propulsion system for flying, surface alignment, and feed during manipulation and allows precise positioning of the power tool. We evaluate our design in a concrete drilling application - a challenging construction process that requires high forces, accuracy, and precision. In 30 trials, our design can accurately pinpoint a target position despite perching imprecision. Nine visually guided drilling experiments demonstrate a drilling precision of 6 mm without further automation. Aside from drilling, we also demonstrate the versatility of the design by setting an anchor into concrete.