 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Micro Overactuated Aerial Robot with an Origami Delta Manipulator
May 03, 2023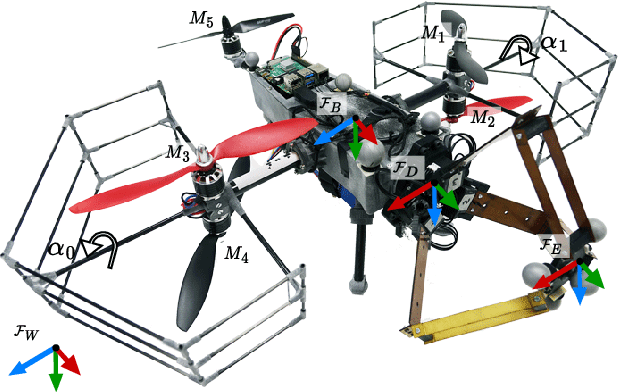
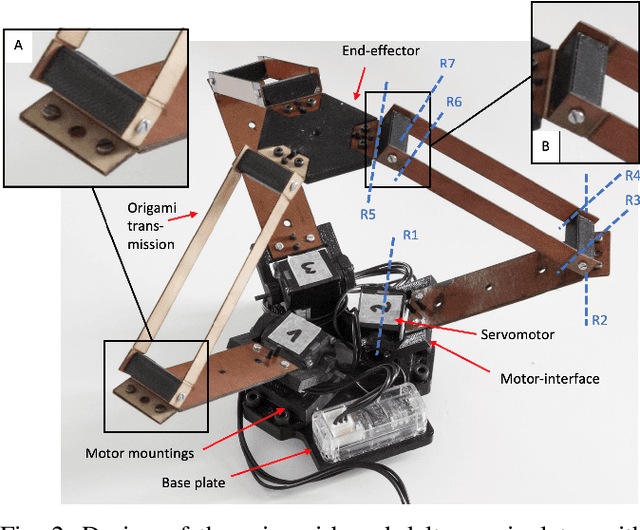
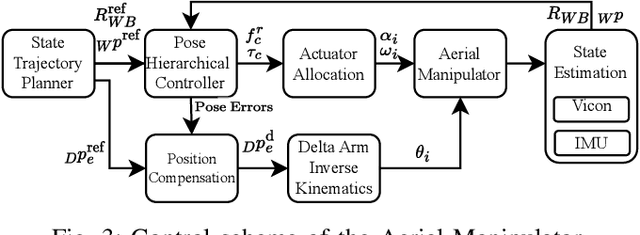
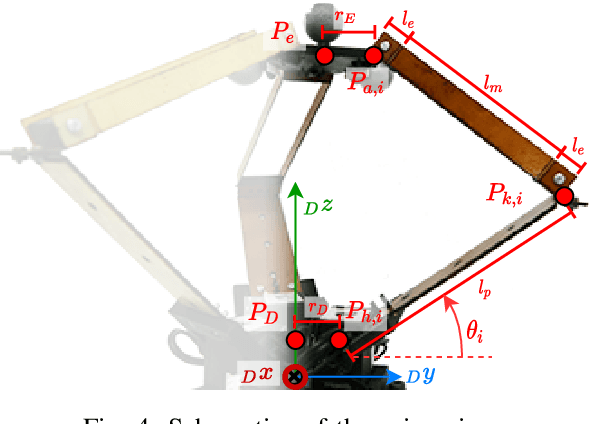
This work presents the mechanical design and control of a novel small-size and lightweight Micro Aerial Vehicle (MAV) for aerial manipulation. To our knowledge, with a total take-off mass of only 2.0 kg, the proposed system is the most lightweight Aerial Manipulator (AM) that has 8-DOF independently controllable: 5 for the aerial platform and 3 for the articulated arm. We designed the robot to be fully-actuated in the body forward direction. This allows independent pitching and instantaneous force generation, improving the platform's performance during physical interaction. The robotic arm is an origami delta manipulator driven by three servomotors, enabling active motion compensation at the end-effector. Its composite multimaterial links help reduce the weight, while their flexibility allow for compliant aerial interaction with the environment. In particular, the arm's stiffness can be changed according to its configuration. We provide an in depth discussion of the system design and characterize the stiffness of the delta arm. A control architecture to deal with the platform's overactuation while exploiting the delta arm is presented. Its capabilities are experimentally illustrated both in free flight and physical interaction, highlighting advantages and disadvantages of the origami's folding mechanism.
MPC with Learned Residual Dynamics with Application on Omnidirectional MAVs
Jul 04, 2022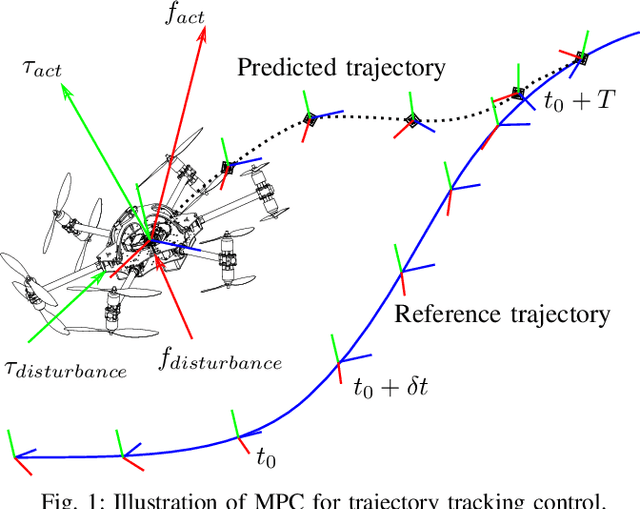
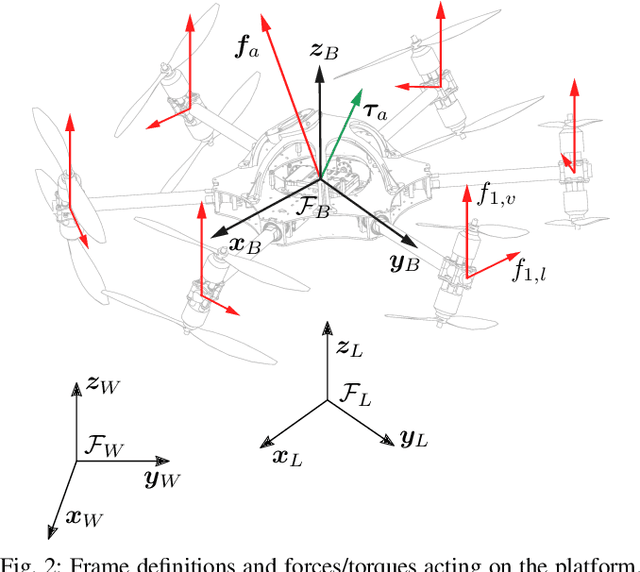
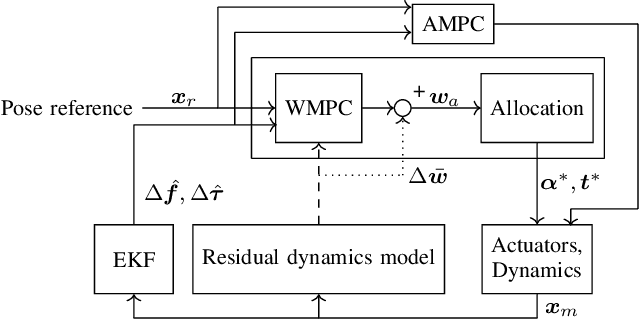
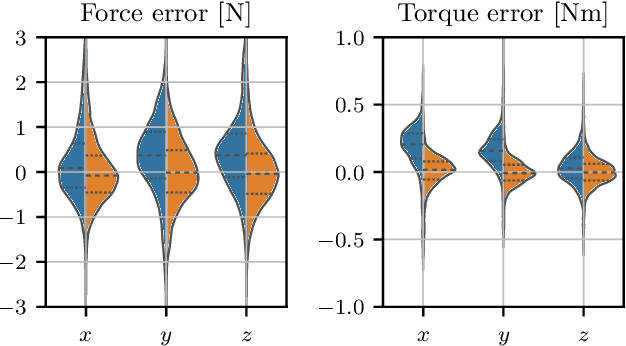
The growing field of aerial manipulation often relies on fully actuated or omnidirectional micro aerial vehicles (OMAVs) which can apply arbitrary forces and torques while in contact with the environment. Control methods are usually based on model-free approaches, separating a high-level wrench controller from an actuator allocation. If necessary, disturbances are rejected by online disturbance observers. However, while being general, this approach often produces sub-optimal control commands and cannot incorporate constraints given by the platform design. We present two model-based approaches to control OMAVs for the task of trajectory tracking while rejecting disturbances. The first one optimizes wrench commands and compensates model errors by a model learned from experimental data. The second one optimizes low-level actuator commands, allowing to exploit an allocation nullspace and to consider constraints given by the actuator hardware. The efficacy and real-time feasibility of both approaches is shown and evaluated in real-world experiments.
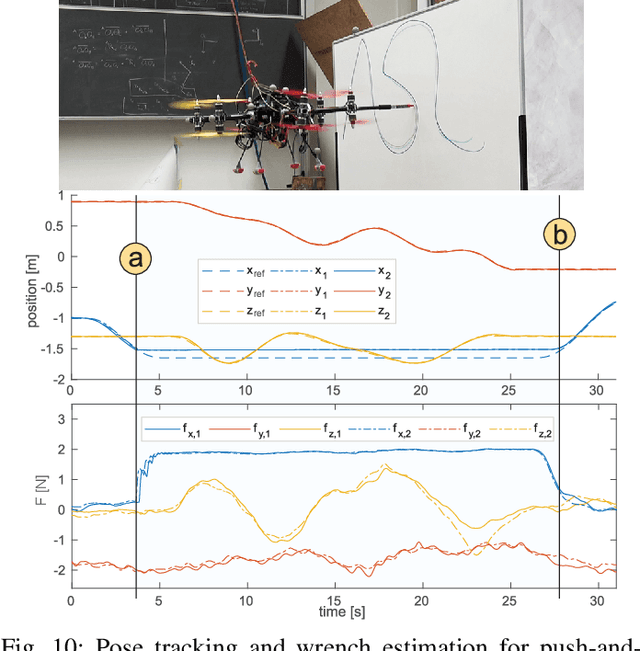
Energy Tank-Based Policies for Robust Aerial Physical Interaction with Moving Objects
Mar 07, 2022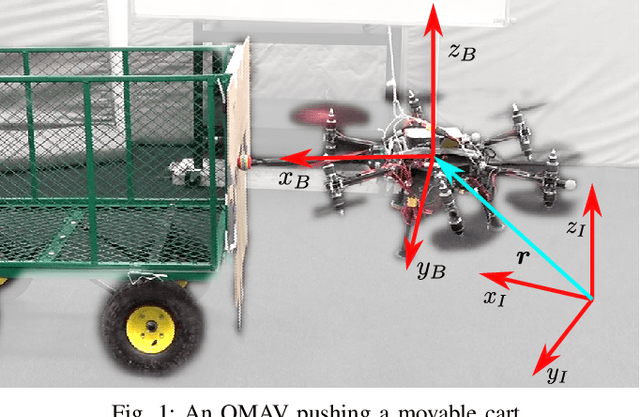
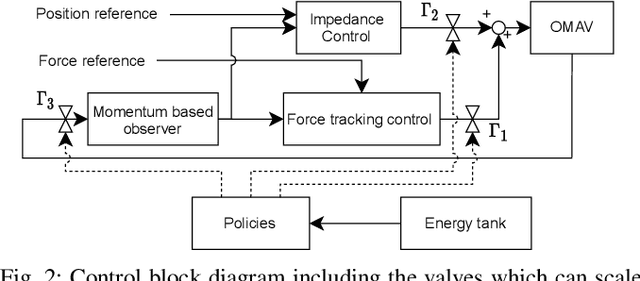
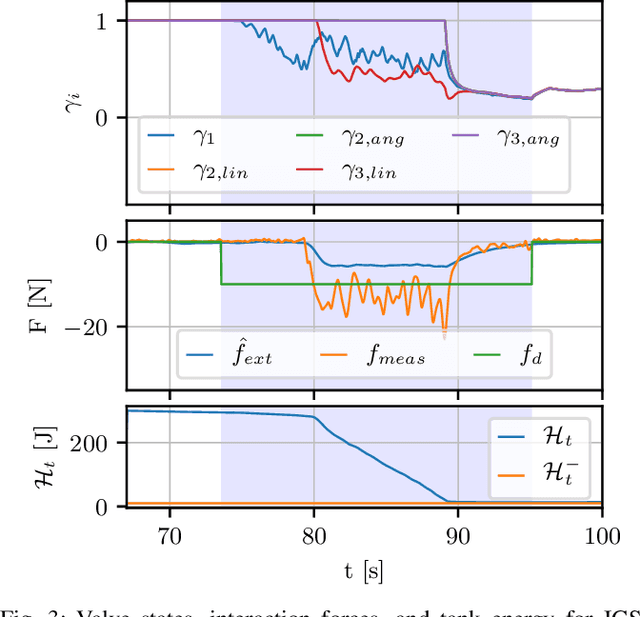
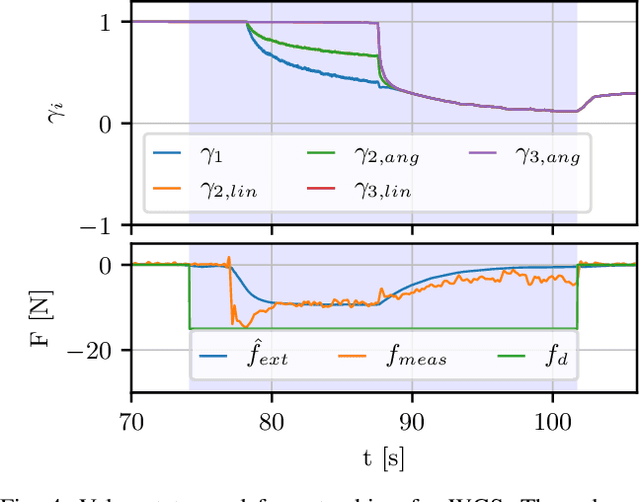
Although manipulation capabilities of aerial robots greatly improved in the last decade, only few works addressed the problem of aerial physical interaction with dynamic environments, proposing strongly model-based approaches. However, in real scenarios, modeling the environment with high accuracy is often impossible. In this work we aim at developing a control framework for OMAVs for reliable physical interaction tasks with articulated and movable objects in the presence of possibly unforeseen disturbances, and without relying on an accurate model of the environment. Inspired by previous applications of energy-based controllers for physical interaction, we propose a passivity-based impedance and wrench tracking controller in combination with a momentum-based wrench estimator. This is combined with an energy-tank framework to guarantee the stability of the system, while energy and power flow-based adaptation policies are deployed to enable safe interaction with any type of passive environment. The control framework provides formal guarantees of stability, which is validated in practice considering the challenging task of pushing a cart of unknown mass, moving on a surface of unknown friction, as well as subjected to unknown disturbances. For this scenario, we present, evaluate and discuss three different policies.
Learning dynamics for improving control of overactuated flying systems
Jun 23, 2020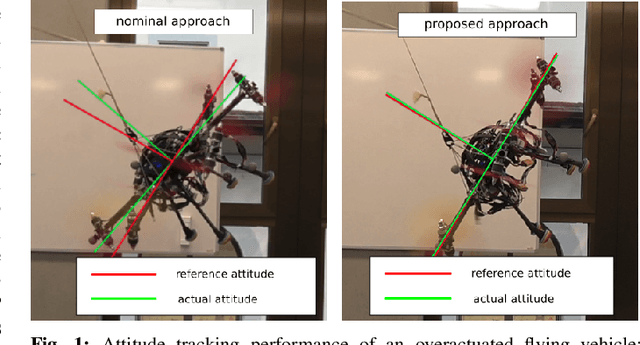
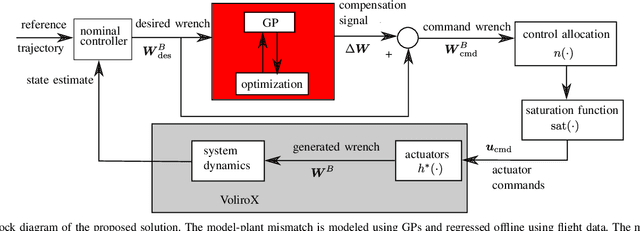
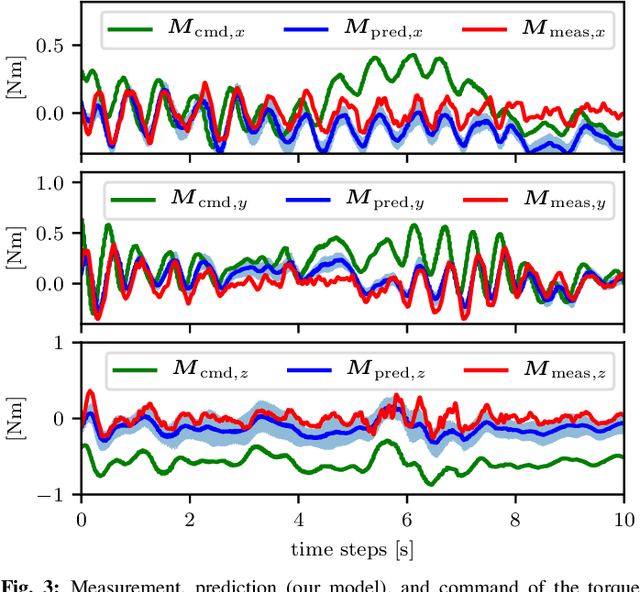
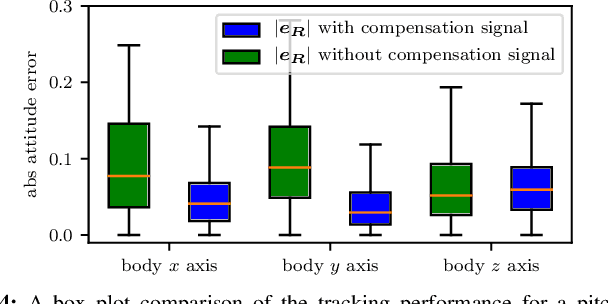
Overactuated omnidirectional flying vehicles are capable of generating force and torque in any direction, which is important for applications such as contact-based industrial inspection. This comes at the price of an increase in model complexity. These vehicles usually have non-negligible, repetitive dynamics that are hard to model, such as the aerodynamic interference between the propellers. This makes it difficult for high-performance trajectory tracking using a model-based controller. This paper presents an approach that combines a data-driven and a first-principle model for the system actuation and uses it to improve the controller. In a first step, the first-principle model errors are learned offline using a Gaussian Process (GP) regressor. At runtime, the first-principle model and the GP regressor are used jointly to obtain control commands. This is formulated as an optimization problem, which avoids ambiguous solutions present in a standard inverse model in overactuated systems, by only using forward models. The approach is validated using a tilt-arm overactuated omnidirectional flying vehicle performing attitude trajectory tracking. The results show that with our proposed method, the attitude trajectory error is reduced by 32% on average as compared to a nominal PID controller.
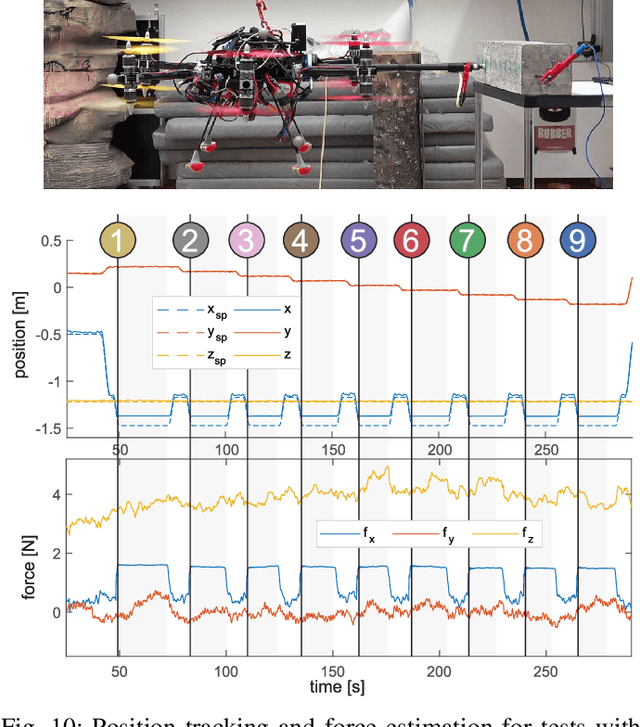
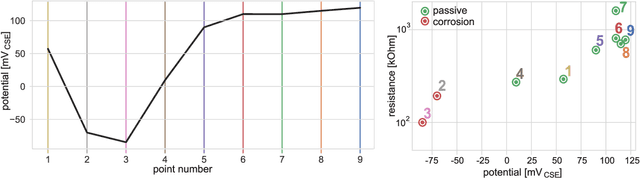
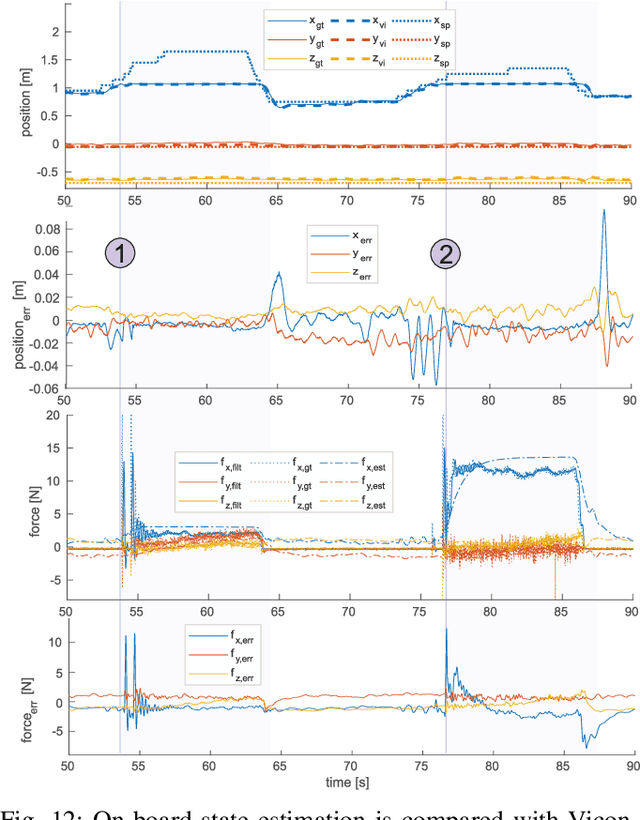
Active Interaction Force Control for Omnidirectional Aerial Contact-Based Inspection
Apr 01, 2020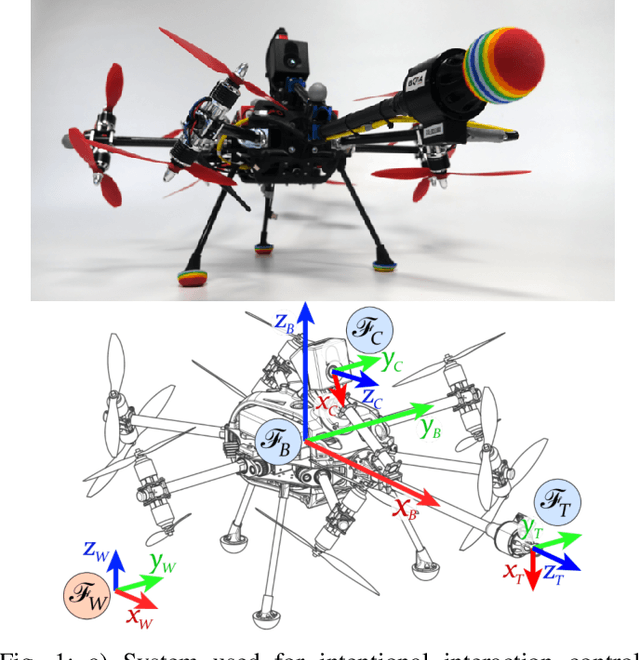
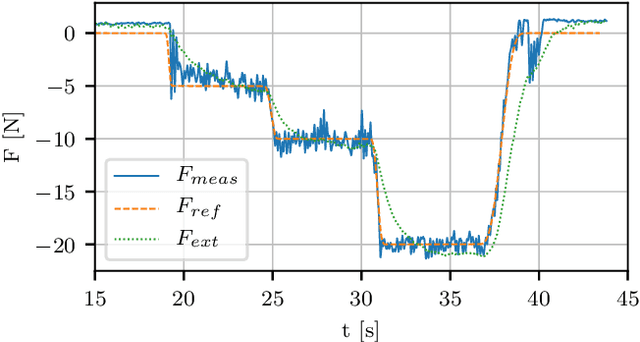
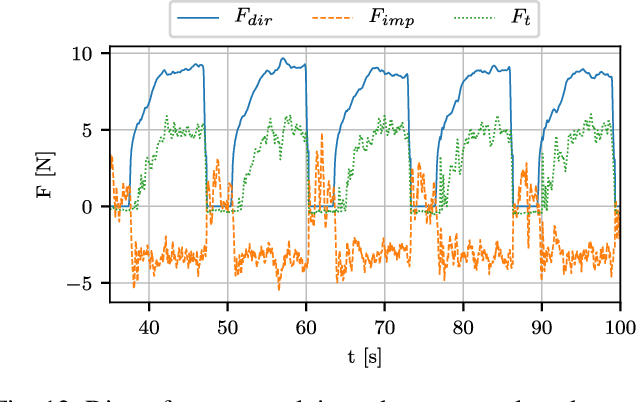
This paper presents and validates two approaches for active interaction force control and planning for omnidirectional aerial manipulation platforms, with the goal of aerial contact inspection in unstructured environments. We extend upon an axis-selective impedance controller to present a variable axis-selective impedance control which integrates direct force control for intentional interaction, using feedback from an on-board force sensor. The control approaches aim to reject disturbances in free flight, while handling unintentional interaction, and actively controlling desired interaction forces. A fully actuated and omnidirectional tilt-rotor aerial system is used to show capabilities of the control and planning methods. Experiments demonstrate disturbance rejection, push-and-slide interaction, and force controlled interaction in different flight orientations. The system is validated as a tool for non-destructive testing of concrete infrastructure, and statistical results of interaction control performance are presented and discussed.
Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.
An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection
May 09, 2019
This paper presents an omnidirectional aerial manipulation platform for robust and responsive interaction with unstructured environments, toward the goal of contact-based inspection. The fully actuated tilt-rotor aerial system is equipped with a rigidly mounted end-effector, and is able to exert a 6 degree of freedom force and torque, decoupling the system's translational and rotational dynamics, and enabling precise interaction with the environment while maintaining stability. An impedance controller with selective apparent inertia is formulated to permit compliance in certain degrees of freedom while achieving precise trajectory tracking and disturbance rejection in others. Experiments demonstrate disturbance rejection, push-and-slide interaction, and on-board state estimation with depth servoing to interact with local surfaces. The system is also validated as a tool for contact-based non-destructive testing of concrete infrastructure.