 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Micro Overactuated Aerial Robot with an Origami Delta Manipulator
May 03, 2023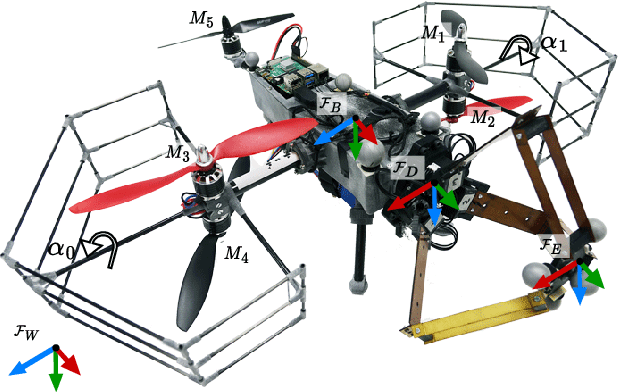
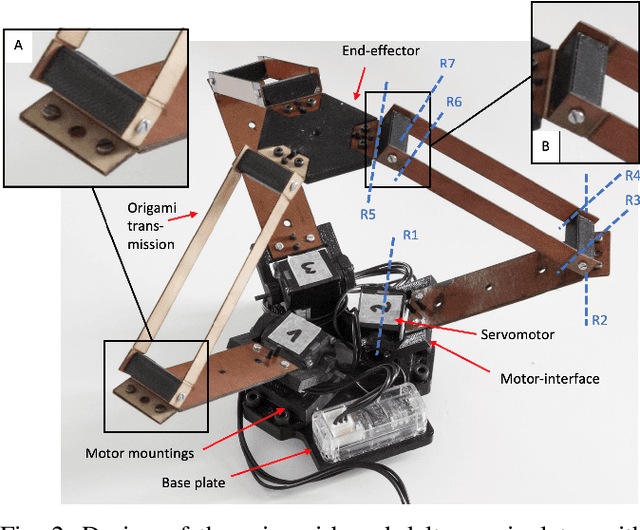
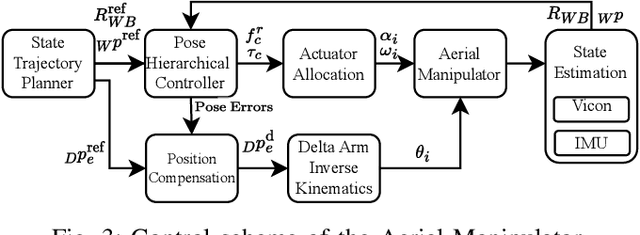
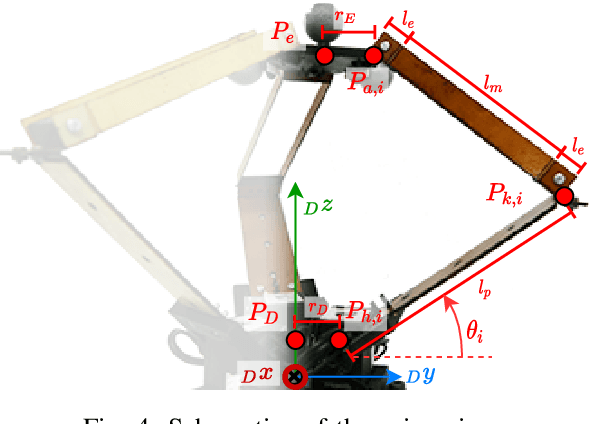
This work presents the mechanical design and control of a novel small-size and lightweight Micro Aerial Vehicle (MAV) for aerial manipulation. To our knowledge, with a total take-off mass of only 2.0 kg, the proposed system is the most lightweight Aerial Manipulator (AM) that has 8-DOF independently controllable: 5 for the aerial platform and 3 for the articulated arm. We designed the robot to be fully-actuated in the body forward direction. This allows independent pitching and instantaneous force generation, improving the platform's performance during physical interaction. The robotic arm is an origami delta manipulator driven by three servomotors, enabling active motion compensation at the end-effector. Its composite multimaterial links help reduce the weight, while their flexibility allow for compliant aerial interaction with the environment. In particular, the arm's stiffness can be changed according to its configuration. We provide an in depth discussion of the system design and characterize the stiffness of the delta arm. A control architecture to deal with the platform's overactuation while exploiting the delta arm is presented. Its capabilities are experimentally illustrated both in free flight and physical interaction, highlighting advantages and disadvantages of the origami's folding mechanism.