 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAscento: A Two-Wheeled Jumping Robot
May 23, 2020
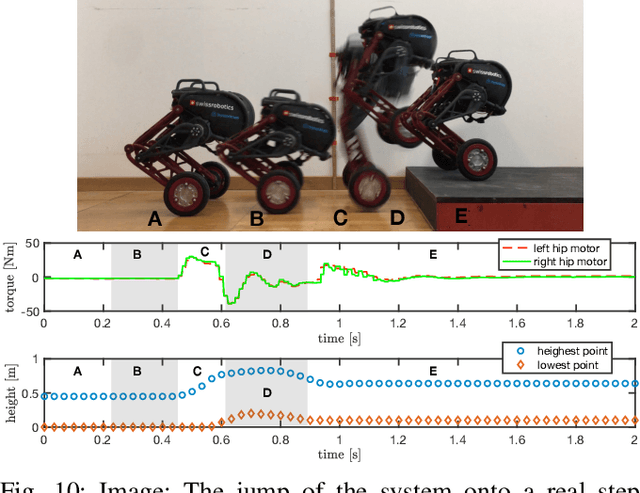
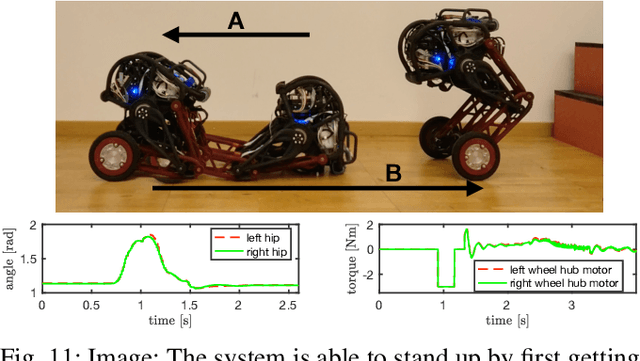
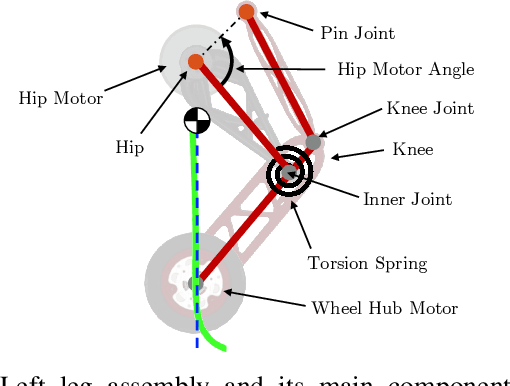
Applications of mobile ground robots demand high speed and agility while navigating in complex indoor environments. These present an ongoing challenge in mobile robotics. A system with these specifications would be of great use for a wide range of indoor inspection tasks. This paper introduces Ascento, a compact wheeled bipedal robot that is able to move quickly on flat terrain, and to overcome obstacles by jumping. The mechanical design and overall architecture of the system is presented, as well as the development of various controllers for different scenarios. A series of experiments with the final prototype system validate these behaviors in realistic scenarios.
* 7 pages, 11 Figures, ICRA 2019
Active Interaction Force Control for Omnidirectional Aerial Contact-Based Inspection
Apr 01, 2020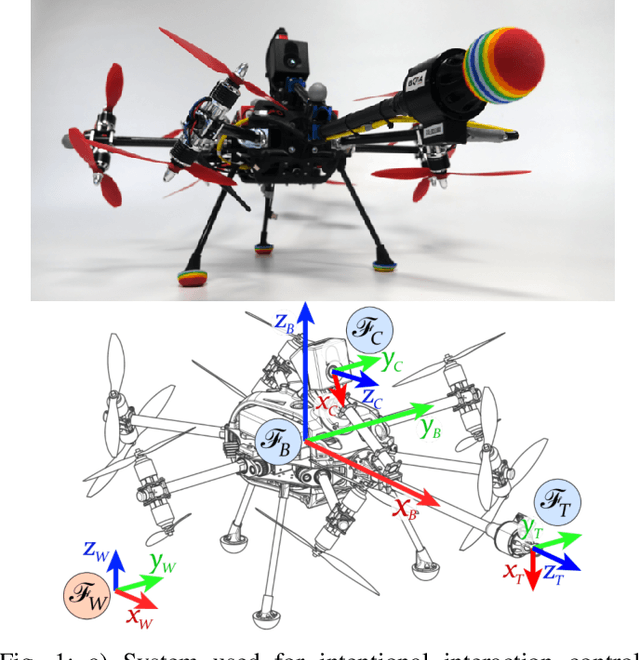
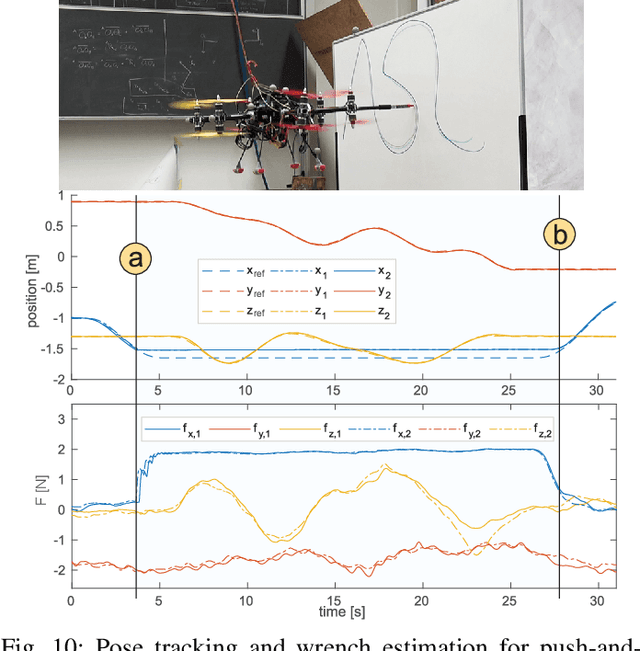
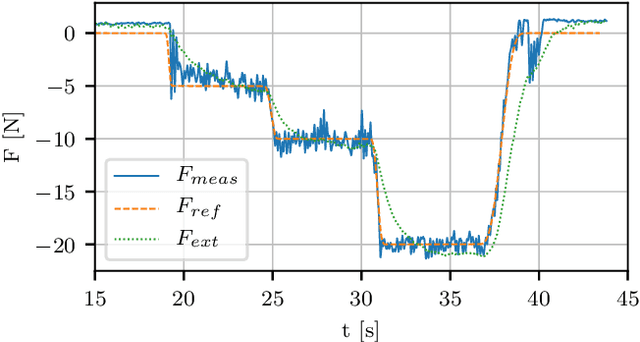
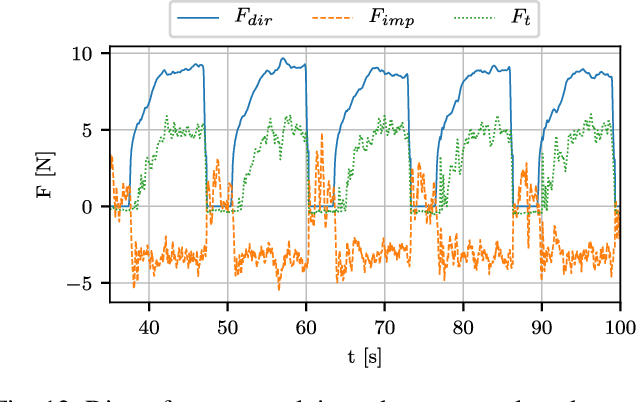
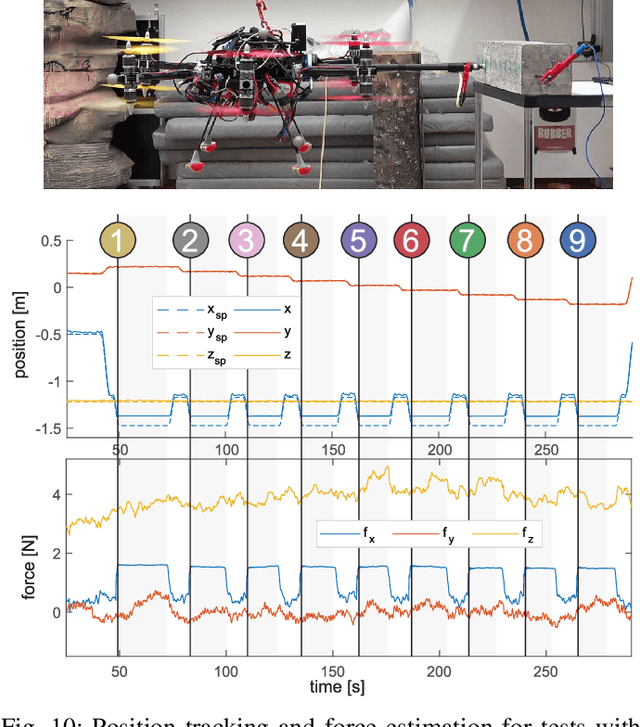
This paper presents and validates two approaches for active interaction force control and planning for omnidirectional aerial manipulation platforms, with the goal of aerial contact inspection in unstructured environments. We extend upon an axis-selective impedance controller to present a variable axis-selective impedance control which integrates direct force control for intentional interaction, using feedback from an on-board force sensor. The control approaches aim to reject disturbances in free flight, while handling unintentional interaction, and actively controlling desired interaction forces. A fully actuated and omnidirectional tilt-rotor aerial system is used to show capabilities of the control and planning methods. Experiments demonstrate disturbance rejection, push-and-slide interaction, and force controlled interaction in different flight orientations. The system is validated as a tool for non-destructive testing of concrete infrastructure, and statistical results of interaction control performance are presented and discussed.
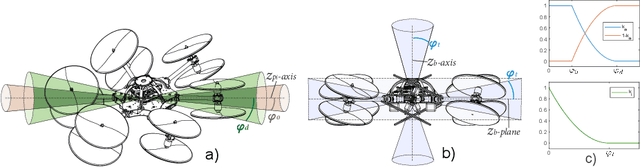
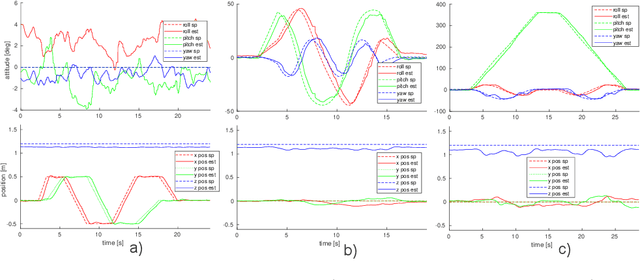
Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight
Mar 20, 2020
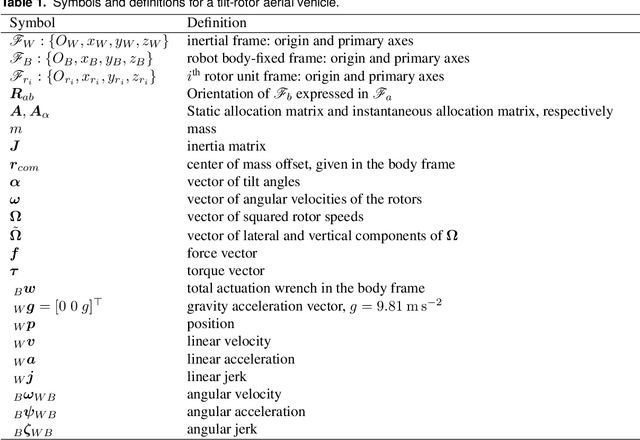
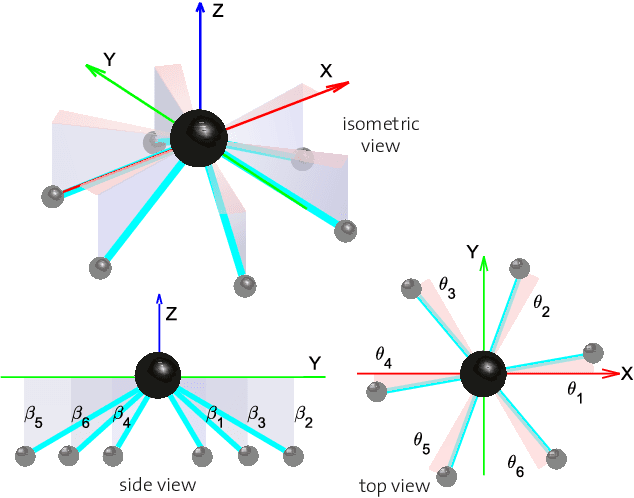
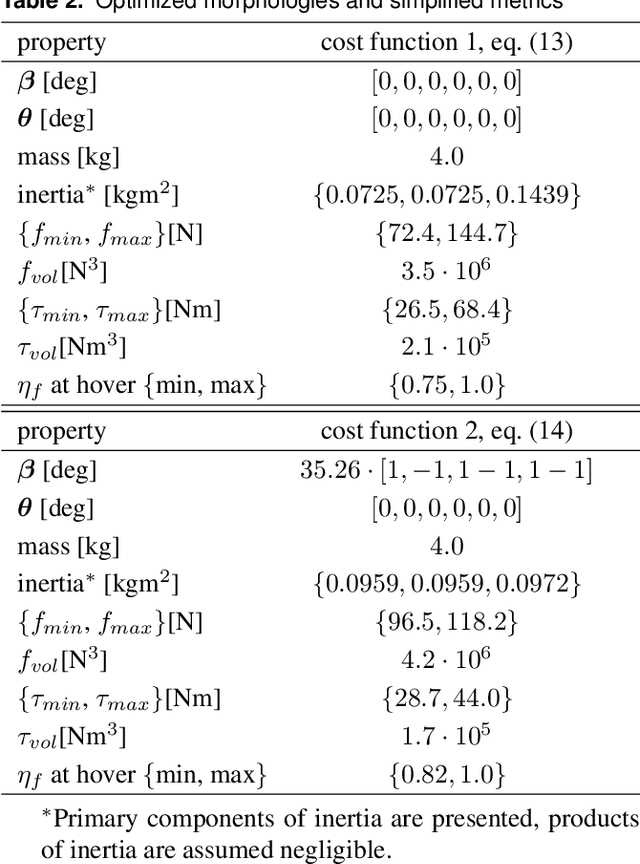
Omnidirectional micro aerial vehicles are a growing field of research, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents the design and optimal control of a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is motivated by the result of a morphology design optimization. A six degrees of freedom optimal controller is derived, with an actuator allocation approach that implements task prioritization, and is robust to singularities. Flight experiments demonstrate and verify the system's capabilities.
An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection
May 09, 2019
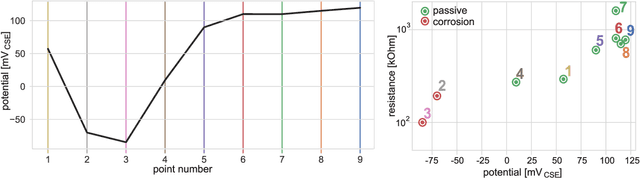
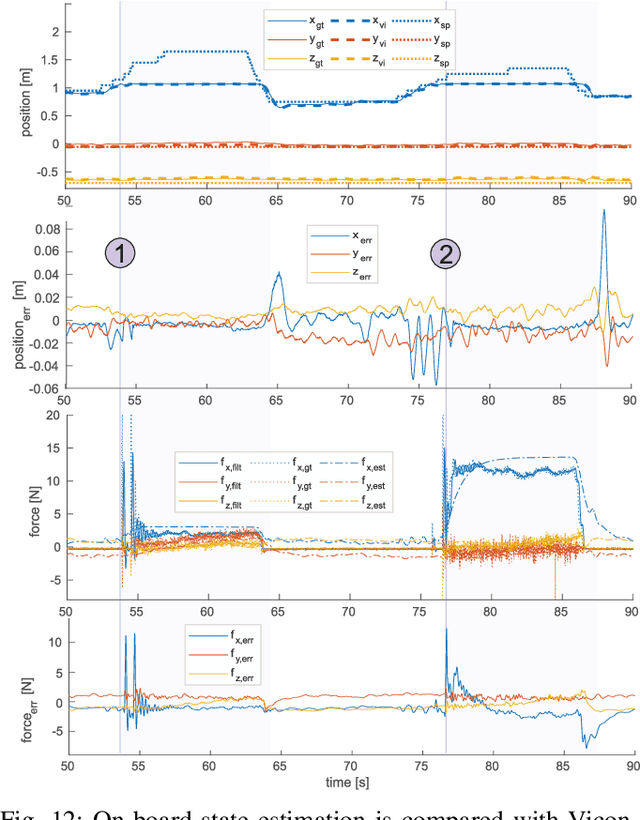
This paper presents an omnidirectional aerial manipulation platform for robust and responsive interaction with unstructured environments, toward the goal of contact-based inspection. The fully actuated tilt-rotor aerial system is equipped with a rigidly mounted end-effector, and is able to exert a 6 degree of freedom force and torque, decoupling the system's translational and rotational dynamics, and enabling precise interaction with the environment while maintaining stability. An impedance controller with selective apparent inertia is formulated to permit compliance in certain degrees of freedom while achieving precise trajectory tracking and disturbance rejection in others. Experiments demonstrate disturbance rejection, push-and-slide interaction, and on-board state estimation with depth servoing to interact with local surfaces. The system is also validated as a tool for contact-based non-destructive testing of concrete infrastructure.
Towards Efficient Full Pose Omnidirectionality with Overactuated MAVs
Oct 15, 2018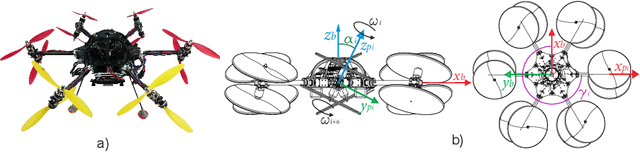
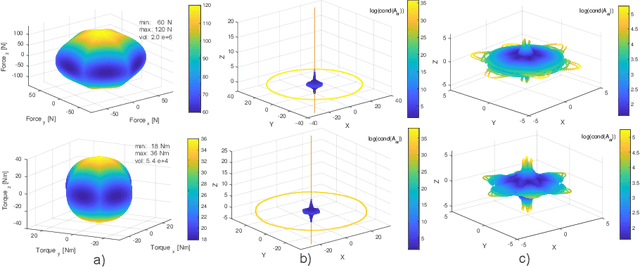
Omnidirectional MAVs are a growing field, with demonstrated advantages for aerial interaction and uninhibited observation. While systems with complete pose omnidirectionality and high hover efficiency have been developed independently, a robust system that combines the two has not been demonstrated to date. This paper presents VoliroX: a novel omnidirectional vehicle that can exert a wrench in any orientation while maintaining efficient flight configurations. The system design is presented, and a 6 DOF geometric control that is robust to singularities. Flight experiments further demonstrate and verify its capabilities.