Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAscento: A Two-Wheeled Jumping Robot
Paper and Code
May 23, 2020
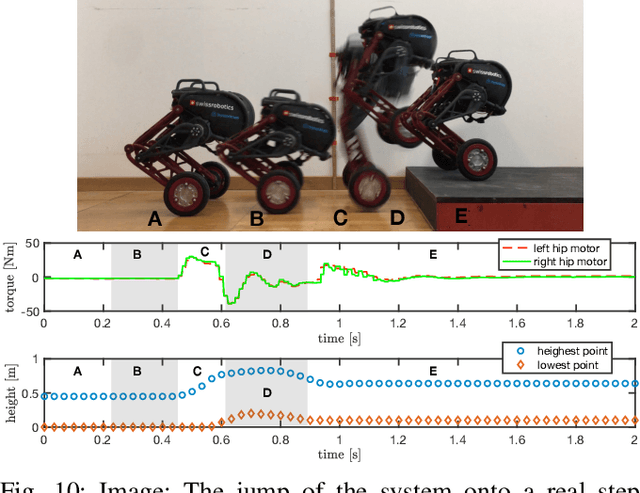
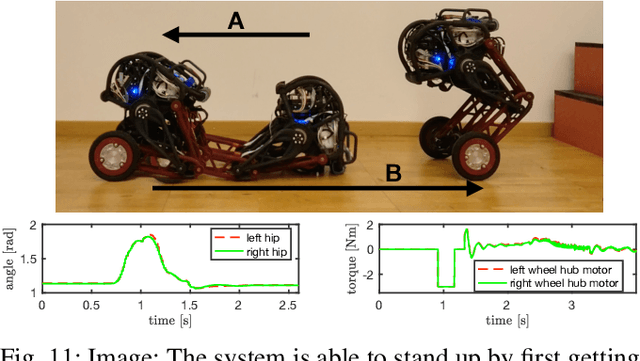
Applications of mobile ground robots demand high speed and agility while navigating in complex indoor environments. These present an ongoing challenge in mobile robotics. A system with these specifications would be of great use for a wide range of indoor inspection tasks. This paper introduces Ascento, a compact wheeled bipedal robot that is able to move quickly on flat terrain, and to overcome obstacles by jumping. The mechanical design and overall architecture of the system is presented, as well as the development of various controllers for different scenarios. A series of experiments with the final prototype system validate these behaviors in realistic scenarios.
* 2019 International Conference on Robotics and Automation (ICRA),
Montreal, QC, Canada, 2019, pp. 7515-7521 * 7 pages, 11 Figures, ICRA 2019
View paper on