 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Interaction Force Control for Omnidirectional Aerial Contact-Based Inspection
Paper and Code
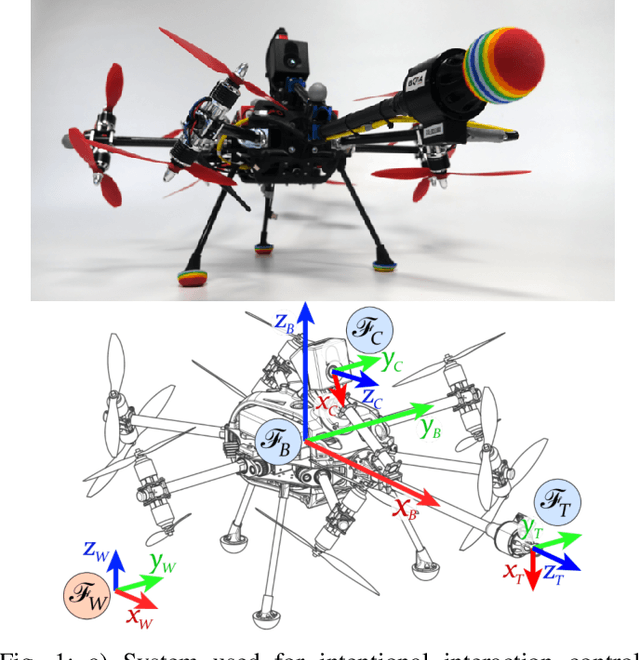
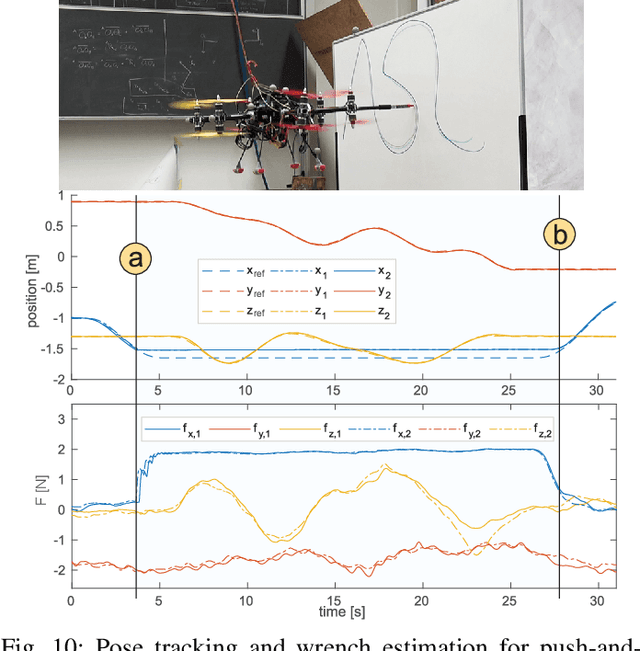
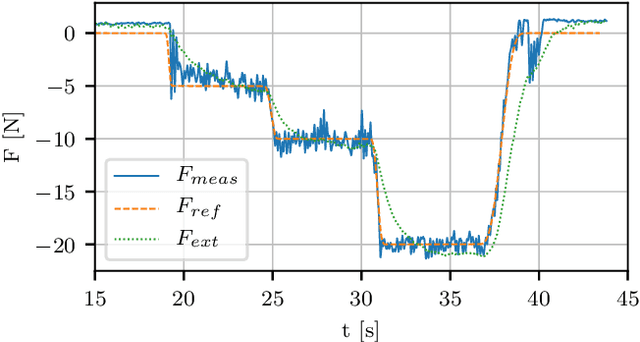
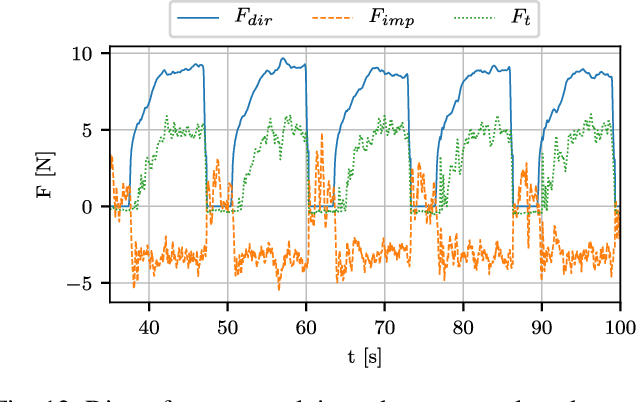
This paper presents and validates two approaches for active interaction force control and planning for omnidirectional aerial manipulation platforms, with the goal of aerial contact inspection in unstructured environments. We extend upon an axis-selective impedance controller to present a variable axis-selective impedance control which integrates direct force control for intentional interaction, using feedback from an on-board force sensor. The control approaches aim to reject disturbances in free flight, while handling unintentional interaction, and actively controlling desired interaction forces. A fully actuated and omnidirectional tilt-rotor aerial system is used to show capabilities of the control and planning methods. Experiments demonstrate disturbance rejection, push-and-slide interaction, and force controlled interaction in different flight orientations. The system is validated as a tool for non-destructive testing of concrete infrastructure, and statistical results of interaction control performance are presented and discussed.