 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-State-Aware Controller for a Tethered Aerial Robot Guiding a Human by Physical Interaction
Paper and Code
Mar 07, 2022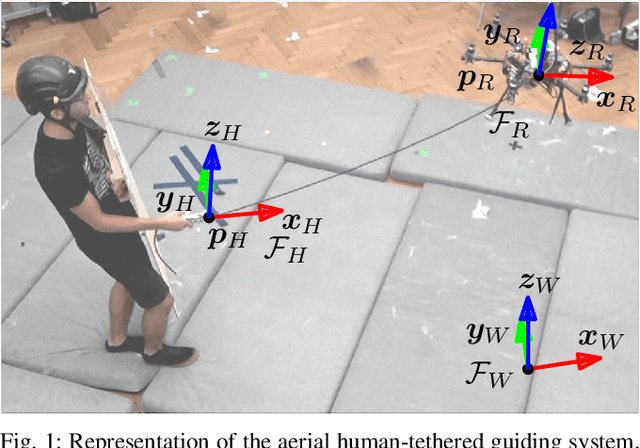


With the rapid development of Aerial Physical Interaction, the possibility to have aerial robots physically interacting with humans is attracting a growing interest. In one of our previous works, we considered one of the first systems in which a human is physically connected to an aerial vehicle by a cable. There, we developed a compliant controller that allows the robot to pull the human toward a desired position using forces only as an indirect communication-channel. However, this controller is based on the robot-state only, which makes the system not adaptable to the human behavior, and in particular to their walking speed. This reduces the effectiveness and comfort of the guidance when the human is still far from the desired point. In this paper, we formally analyze the problem and propose a human-state-aware controller that includes a human`s velocity feedback. We theoretically prove and experimentally show that this method provides a more consistent guiding force which enhances the guiding experience.