 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
May 29, 2024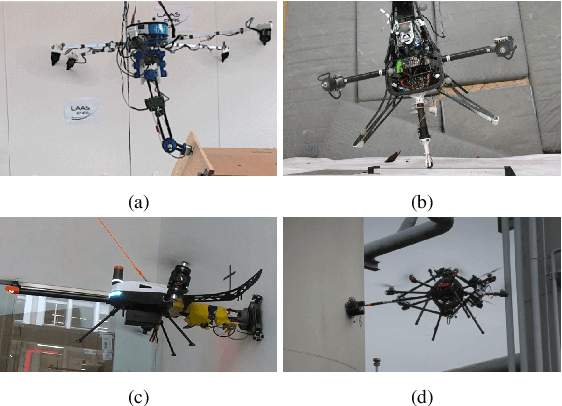
Push-and-slide tasks carried out by fully-actuated aerial robots can be used for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Often, an end-effector based on multiple non-actuated contact wheels is used to contact the surface. This approach entails challenges in ensuring consistent wheel contact with a surface whose exact orientation and location might be uncertain due to sensor aliasing and drift. Using a standard full-pose controller dependent on the inaccurate surface position and orientation may cause wheels to lose contact during sliding, and subsequently lead to robot tip-over. To address the tip-over issue, we present two approaches: (1) tip-over avoidance guidelines for hardware design, and (2) control for tip-over recovery and avoidance. Physical experiments with a fully-actuated aerial vehicle were executed for a push-and-slide task on a flat surface. The resulting data is used in deriving tip-over avoidance guidelines and designing a simulator that closely captures real-world conditions. We then use the simulator to test the effectiveness and robustness of the proposed approaches in risky scenarios against uncertainties.
To Fuse or Not to Fuse: Measuring Consistency in Multi-Sensor Fusion for Aerial Robots
Dec 22, 2023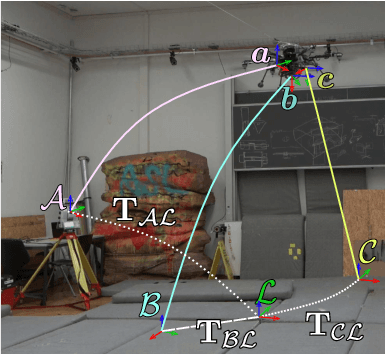
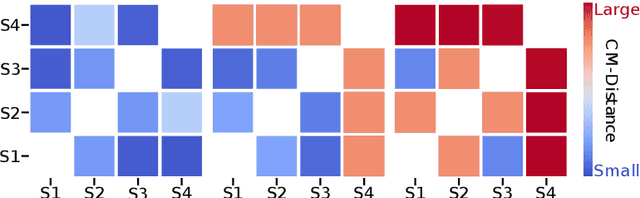
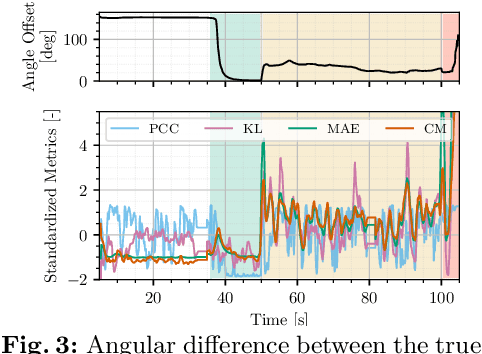
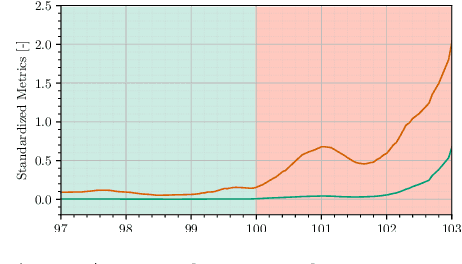
Aerial vehicles are no longer limited to flying in open space: recent work has focused on aerial manipulation and up-close inspection. Such applications place stringent requirements on state estimation: the robot must combine state information from many sources, including onboard odometry and global positioning sensors. However, flying close to or in contact with structures is a degenerate case for many sensing modalities, and the robot's state estimation framework must intelligently choose which sensors are currently trustworthy. We evaluate a number of metrics to judge the reliability of sensing modalities in a multi-sensor fusion framework, then introduce a consensus-finding scheme that uses this metric to choose which sensors to fuse or not to fuse. Finally, we show that such a fusion framework is more robust and accurate than fusing all sensors all the time and demonstrate how such metrics can be informative in real-world experiments in indoor-outdoor flight and bridge inspection.
A perching and tilting aerial robot for precise and versatile power tool work on vertical walls
Oct 16, 2023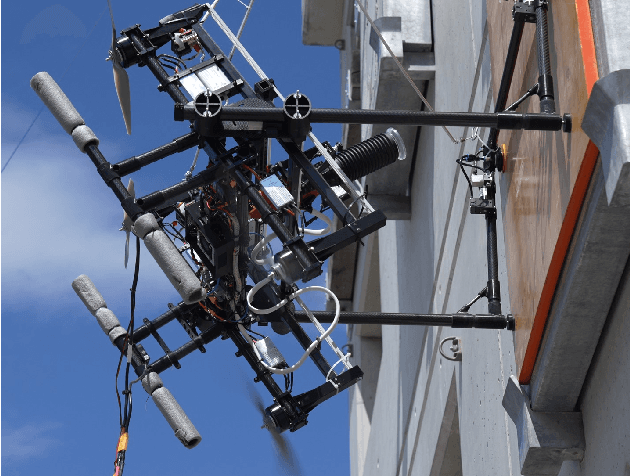
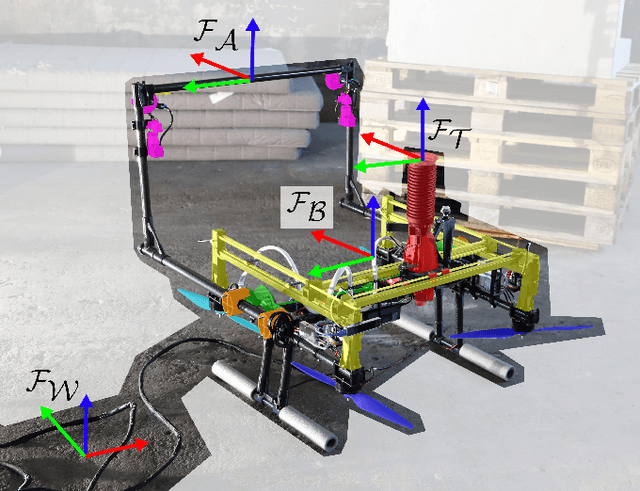
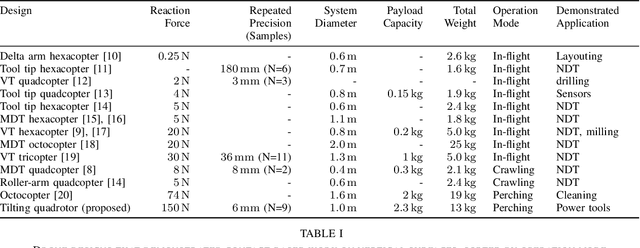
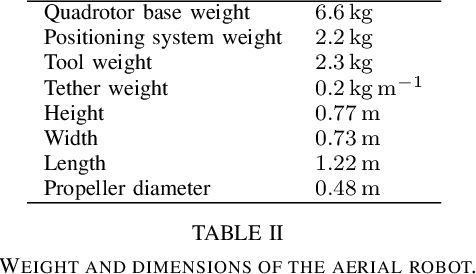
Drilling, grinding, and setting anchors on vertical walls are fundamental processes in everyday construction work. Manually doing these works is error-prone, potentially dangerous, and elaborate at height. Today, heavy mobile ground robots can perform automatic power tool work. However, aerial vehicles could be deployed in untraversable environments and reach inaccessible places. Existing drone designs do not provide the large forces, payload, and high precision required for using power tools. This work presents the first aerial robot design to perform versatile manipulation tasks on vertical concrete walls with continuous forces of up to 150 N. The platform combines a quadrotor with active suction cups for perching on walls and a lightweight, tiltable linear tool table. This combination minimizes weight using the propulsion system for flying, surface alignment, and feed during manipulation and allows precise positioning of the power tool. We evaluate our design in a concrete drilling application - a challenging construction process that requires high forces, accuracy, and precision. In 30 trials, our design can accurately pinpoint a target position despite perching imprecision. Nine visually guided drilling experiments demonstrate a drilling precision of 6 mm without further automation. Aside from drilling, we also demonstrate the versatility of the design by setting an anchor into concrete.
Chasing Millimeters: Design, Navigation and State Estimation for Precise In-flight Marking on Ceilings
Mar 02, 2023Precise markings for drilling and assembly are crucial, laborious construction tasks. Aerial robots with suitable end-effectors are capable of markings at the millimeter scale. However, so far, they have only been demonstrated under laboratory conditions where rigid state estimation and navigation assumptions do not impede robustness and accuracy. This paper presents a complete aerial layouting system capable of precise markings on-site under realistic conditions. We use a compliant actuated end-effector on an omnidirectional flying base. Combining a two-stage factor-graph state estimator with a Riemannian Motion Policy-based navigation stack, we avoid the need for a globally consistent estimate and increase robustness. The policy-based navigation is structured into individual behaviors in different state spaces. Through a comprehensive study, we show that the system creates highly precise markings at a relative precision of 1.5 mm and a global accuracy of 5-6 mm and discuss the results in the context of future construction robotics.
Modelling and Estimation of Human Walking Gait for Physical Human-Robot Interaction
Aug 27, 2021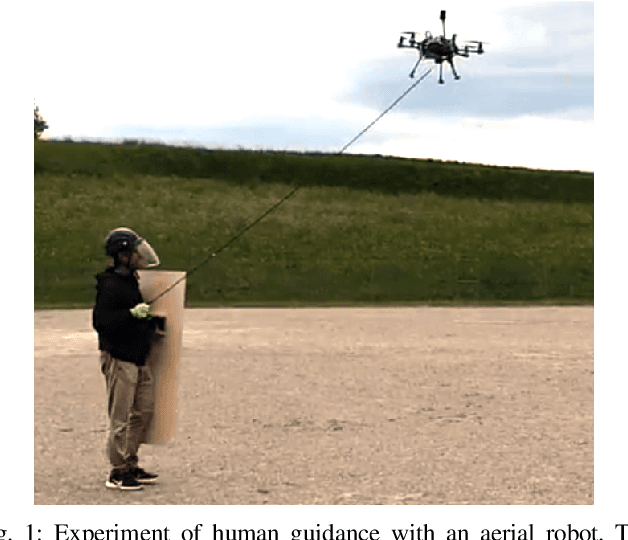
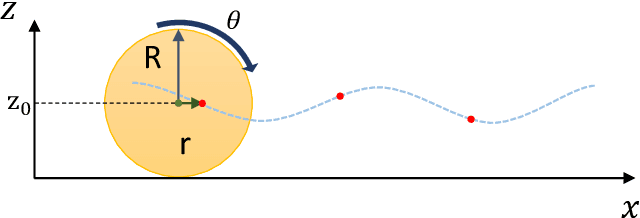
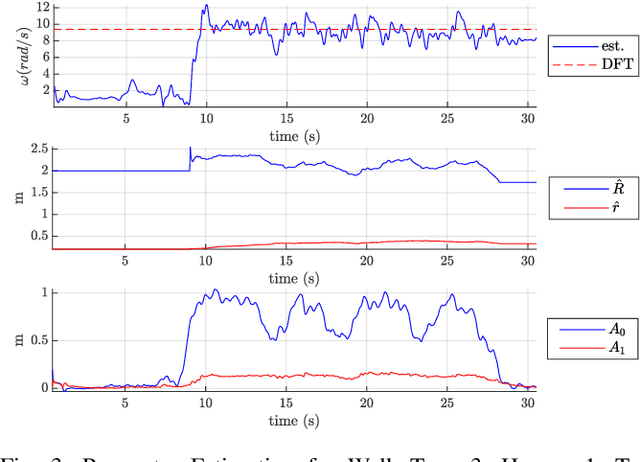
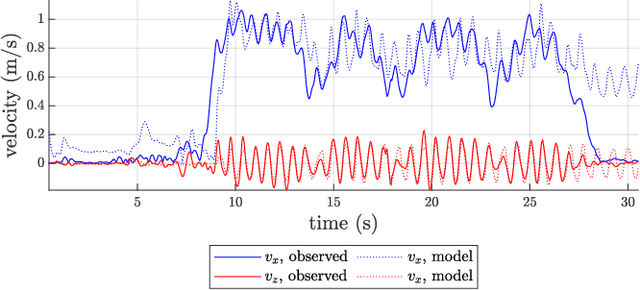
An approach to model and estimate human walking kinematics in real-time for Physical Human-Robot Interaction is presented. The human gait velocity along the forward and vertical direction of motion is modelled according to the Yoyo-model. We designed an Extended Kalman Filter (EKF) algorithm to estimate the frequency, bias and trigonometric state of a biased sinusoidal signal, from which the kinematic parameters of the Yoyo-model can be extracted. Quality and robustness of the estimation are improved by opportune filtering based on heuristics. The approach is successfully evaluated on a real dataset of walking humans, including complex trajectories and changing step frequency over time.
Freetures: Localization in Signed Distance Function Maps
Oct 21, 2020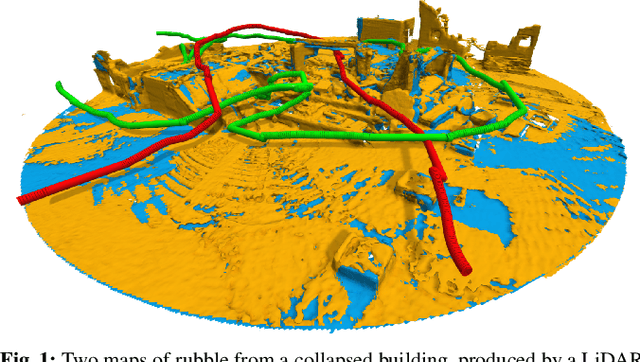
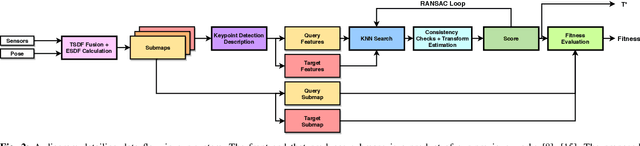
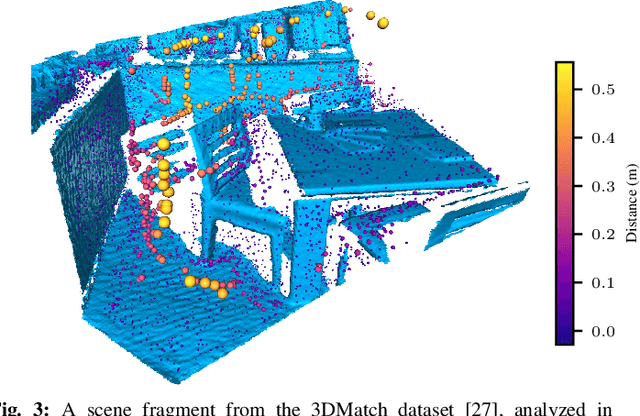
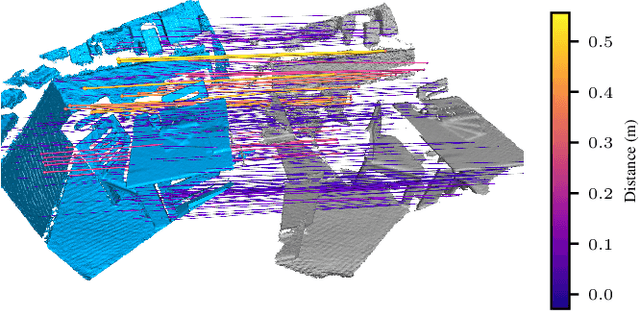
Localization of a robotic system within a previously mapped environment is important for reducing estimation drift and for reusing previously built maps. Existing techniques for geometry-based localization have focused on the description of local surface geometry, usually using pointclouds as the underlying representation. We propose a system for geometry-based localization that extracts features directly from an implicit surface representation: the Signed Distance Function (SDF). The SDF varies continuously through space, which allows the proposed system to extract and utilize features describing both surfaces and free-space. Through evaluations on public datasets, we demonstrate the flexibility of this approach, and show an increase in localization performance over state-of-the-art handcrafted surfaces-only descriptors. We achieve an average improvement of ~12% on an RGB-D dataset and ~18% on a LiDAR-based dataset. Finally, we demonstrate our system for localizing a LiDAR-equipped MAV within a previously built map of a search and rescue training ground.