 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA perching and tilting aerial robot for precise and versatile power tool work on vertical walls
Oct 16, 2023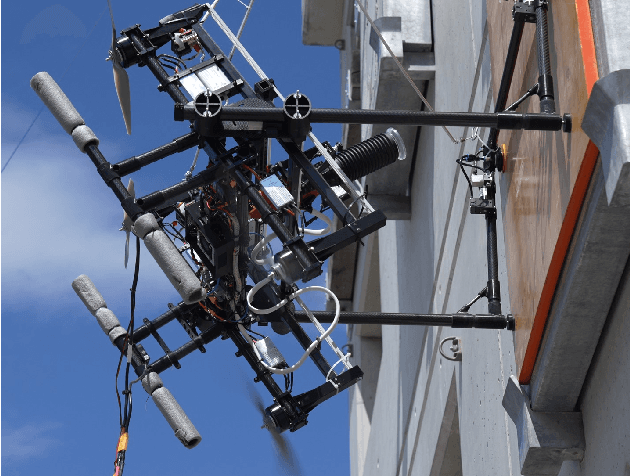
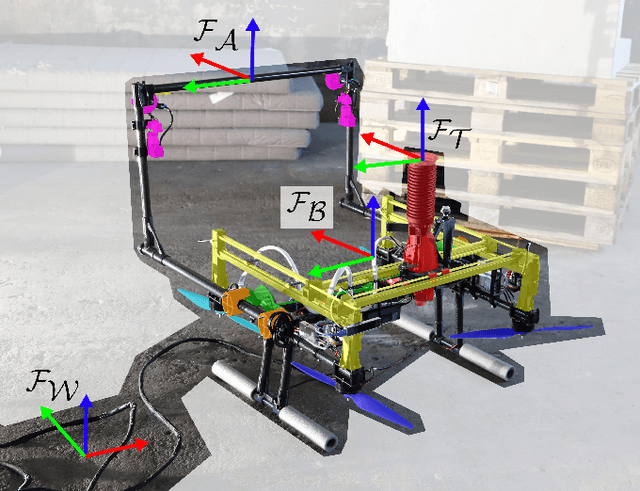
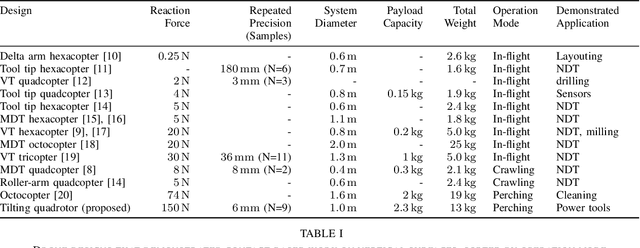
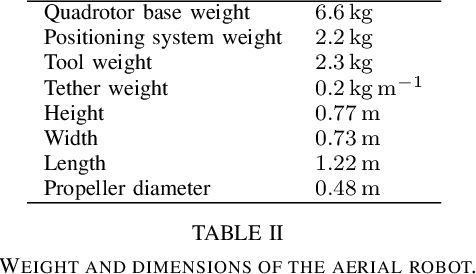
Drilling, grinding, and setting anchors on vertical walls are fundamental processes in everyday construction work. Manually doing these works is error-prone, potentially dangerous, and elaborate at height. Today, heavy mobile ground robots can perform automatic power tool work. However, aerial vehicles could be deployed in untraversable environments and reach inaccessible places. Existing drone designs do not provide the large forces, payload, and high precision required for using power tools. This work presents the first aerial robot design to perform versatile manipulation tasks on vertical concrete walls with continuous forces of up to 150 N. The platform combines a quadrotor with active suction cups for perching on walls and a lightweight, tiltable linear tool table. This combination minimizes weight using the propulsion system for flying, surface alignment, and feed during manipulation and allows precise positioning of the power tool. We evaluate our design in a concrete drilling application - a challenging construction process that requires high forces, accuracy, and precision. In 30 trials, our design can accurately pinpoint a target position despite perching imprecision. Nine visually guided drilling experiments demonstrate a drilling precision of 6 mm without further automation. Aside from drilling, we also demonstrate the versatility of the design by setting an anchor into concrete.
Chasing Millimeters: Design, Navigation and State Estimation for Precise In-flight Marking on Ceilings
Mar 02, 2023Precise markings for drilling and assembly are crucial, laborious construction tasks. Aerial robots with suitable end-effectors are capable of markings at the millimeter scale. However, so far, they have only been demonstrated under laboratory conditions where rigid state estimation and navigation assumptions do not impede robustness and accuracy. This paper presents a complete aerial layouting system capable of precise markings on-site under realistic conditions. We use a compliant actuated end-effector on an omnidirectional flying base. Combining a two-stage factor-graph state estimator with a Riemannian Motion Policy-based navigation stack, we avoid the need for a globally consistent estimate and increase robustness. The policy-based navigation is structured into individual behaviors in different state spaces. Through a comprehensive study, we show that the system creates highly precise markings at a relative precision of 1.5 mm and a global accuracy of 5-6 mm and discuss the results in the context of future construction robotics.
Obstacle avoidance using raycasting and Riemannian Motion Policies at kHz rates for MAVs
Jan 19, 2023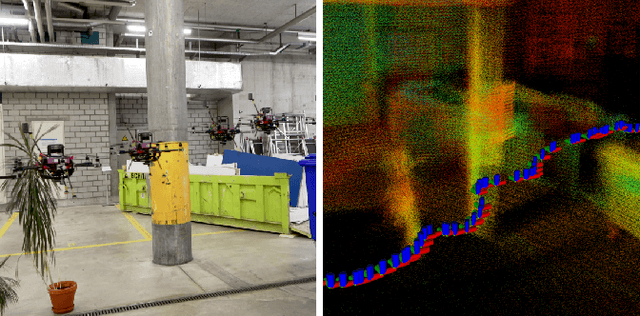
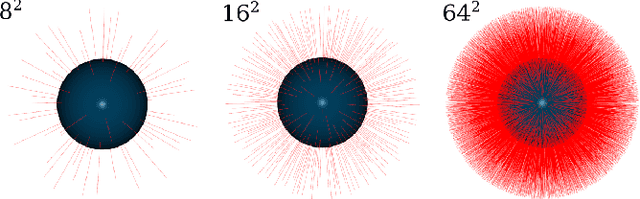
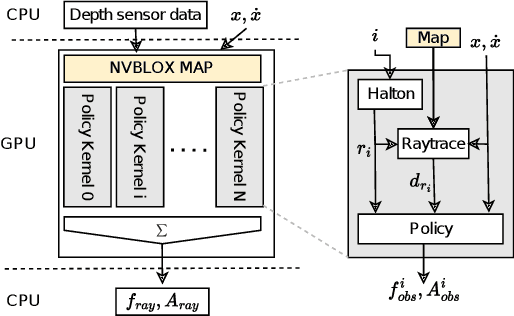
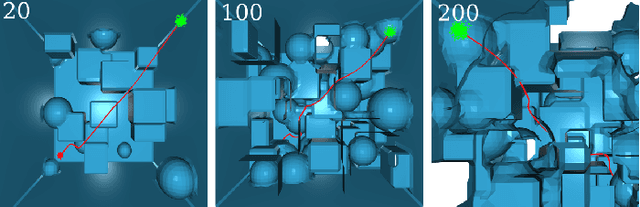
In this paper, we present a novel method for using Riemannian Motion Policies on volumetric maps, shown in the example of obstacle avoidance for Micro Aerial Vehicles (MAVs). While sampling or optimization-based planners are widely used for obstacle avoidance with volumetric maps, they are computationally expensive and often have inflexible monolithic architectures. Riemannian Motion Policies are a modular, parallelizable, and efficient navigation paradigm but are challenging to use with the widely used voxel-based environment representations. We propose using GPU raycasting and a large number of concurrent policies to provide direct obstacle avoidance using Riemannian Motion Policies in voxelized maps without the need for smoothing or pre-processing of the map. Additionally, we present how the same method can directly plan on LiDAR scans without the need for an intermediate map. We show how this reactive approach compares favorably to traditional planning methods and is able to plan using thousands of rays at kilohertz rates. We demonstrate the planner successfully on a real MAV for static and dynamic obstacles. The presented planner is made available as an open-source software package.
Resilient Terrain Navigation with a 5 DOF Metal Detector Drone
Dec 15, 2022



Micro aerial vehicles (MAVs) hold the potential for performing autonomous and contactless land surveys for the detection of landmines and explosive remnants of war (ERW). Metal detectors are the standard tool, but have to be operated close to and parallel to the terrain. As this requires advanced flight capabilities, they have not been successfully combined with MAVs before. To this end, we present a full system to autonomously survey challenging undulated terrain using a metal detector mounted on a 5 degrees of freedom (DOF) MAV. Based on an online estimate of the terrain, our receding-horizon planner efficiently covers the area, aligning the detector to the surface while considering the kinematic and visibility constraints of the platform. For resilient localization, we propose a factor-graph approach for online fusion of GNSS, IMU and LiDAR measurements. A simulated ablation study shows that the proposed planner reduces coverage duration and improves trajectory smoothness. Real-world flight experiments showcase autonomous mapping of buried metallic objects in undulated and obstructed terrain. The proposed localization approach is resilient to individual sensor degeneracy.
Under the Sand: Navigation and Localization of a Small Unmanned Aerial Vehicle for Landmine Detection with Ground Penetrating Synthetic Aperture Radar
Jun 18, 2021
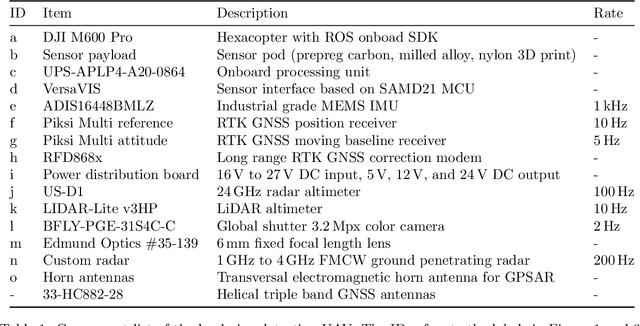
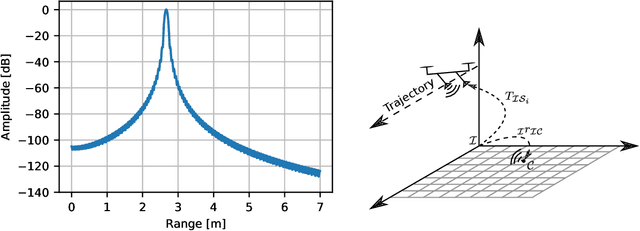

Ground penetrating radar mounted on a small unmanned aerial vehicle (UAV) is a promising tool to assist humanitarian landmine clearance. However, the quality of synthetic aperture radar images depends on accurate and precise motion estimation of the radar antennas as well as generating informative viewpoints with the UAV. This paper presents a complete and automatic airborne ground-penetrating synthetic aperture radar (GPSAR) system. The system consists of a spatially calibrated and temporally synchronized industrial grade sensor suite that enables navigation above ground level, radar imaging, and optical imaging. A custom mission planning framework allows generation and automatic execution of stripmap and circular GPSAR trajectories controlled above ground level as well as aerial imaging survey flights. A factor graph based state estimator fuses measurements from dual receiver real-time kinematic (RTK) global navigation satellite system (GNSS) and an inertial measurement unit (IMU) to obtain precise, high rate platform positions and orientations. Ground truth experiments showed sensor timing as accurate as 0.8 {\mu}s and as precise as 0.1 {\mu}s with localization rates of 1 kHz. The dual position factor formulation improves online localization accuracy up to 40 % and batch localization accuracy up to 59 % compared to a single position factor with uncertain heading initialization. Our field trials validated a localization accuracy and precision that enables coherent radar measurement addition and detection of radar targets buried in sand. This validates the potential as an aerial landmine detection system.
Revisiting Boustrophedon Coverage Path Planning as a Generalized Traveling Salesman Problem
Jul 22, 2019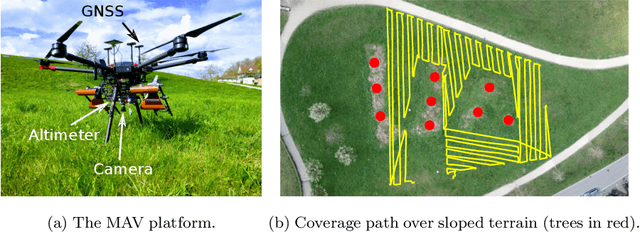
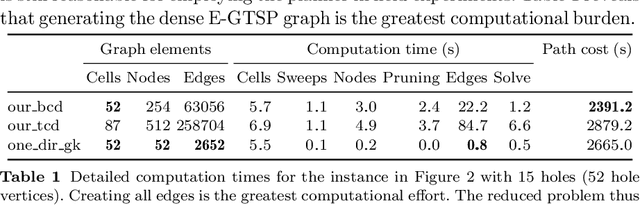
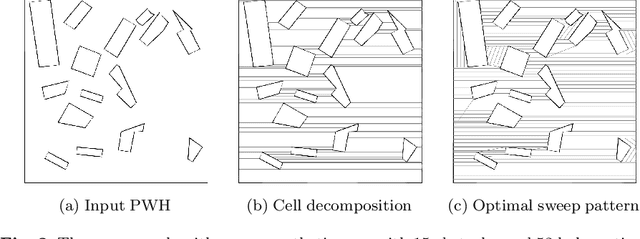

In this paper, we present a path planner for low-altitude terrain coverage in known environments with unmanned rotary-wing micro aerial vehicles (MAVs). Airborne systems can assist humanitarian demining by surveying suspected hazardous areas (SHAs) with cameras, ground-penetrating synthetic aperture radar (GPSAR), and metal detectors. Most available coverage planner implementations for MAVs do not consider obstacles and thus cannot be deployed in obstructed environments. We describe an open source framework to perform coverage planning in polygon flight corridors with obstacles. Our planner extends boustrophedon coverage planning by optimizing over different sweep combinations to find the optimal sweep path, and considers obstacles during transition flights between cells. We evaluate the path planner on 320 synthetic maps and show that it is able to solve realistic planning instances fast enough to run in the field. The planner achieves 14% lower path costs than a conventional coverage planner. We validate the planner on a real platform where we show low-altitude coverage over a sloped terrain with trees.
History-aware Autonomous Exploration in Confined Environments using MAVs
Mar 28, 2018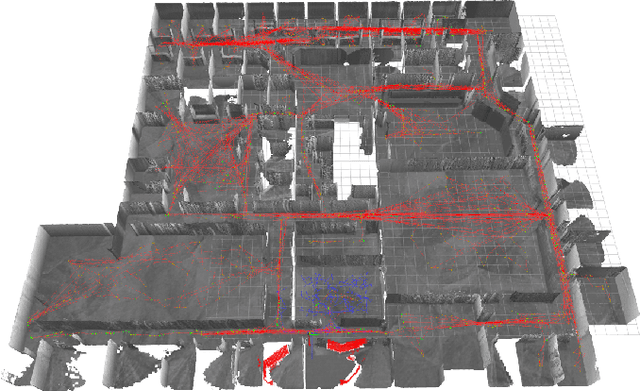
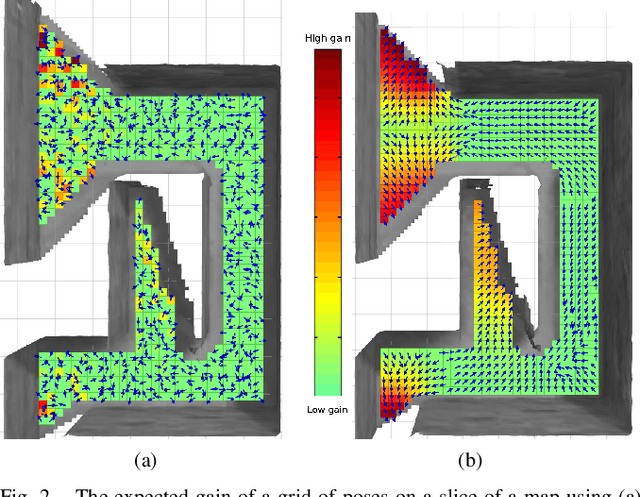

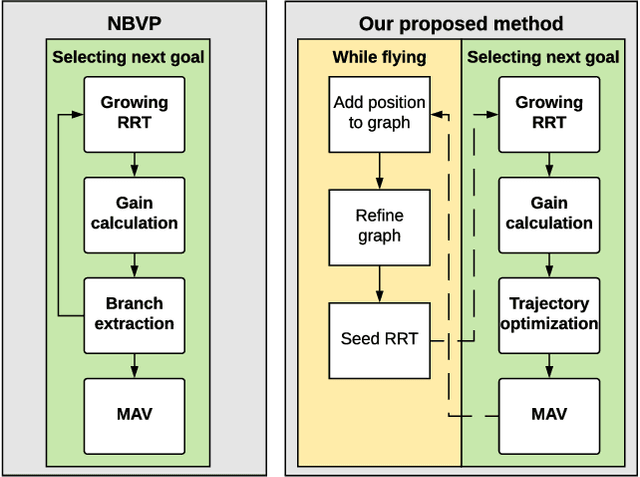
Many scenarios require a robot to be able to explore its 3D environment online without human supervision. This is especially relevant for inspection tasks and search and rescue missions. To solve this high-dimensional path planning problem, sampling-based exploration algorithms have proven successful. However, these do not necessarily scale well to larger environments or spaces with narrow openings. This paper presents a 3D exploration planner based on the principles of Next-Best Views (NBVs). In this approach, a Micro-Aerial Vehicle (MAV) equipped with a limited field-of-view depth sensor randomly samples its configuration space to find promising future viewpoints. In order to obtain high sampling efficiency, our planner maintains and uses a history of visited places, and locally optimizes the robot's orientation with respect to unobserved space. We evaluate our method in several simulated scenarios, and compare it against a state-of-the-art exploration algorithm. The experiments show substantial improvements in exploration time ($2\times$ faster), computation time, and path length, and advantages in handling difficult situations such as escaping dead-ends (up to $20\times$ faster). Finally, we validate the on-line capability of our algorithm on a computational constrained real world MAV.
The ETH-MAV Team in the MBZ International Robotics Challenge
Mar 21, 2018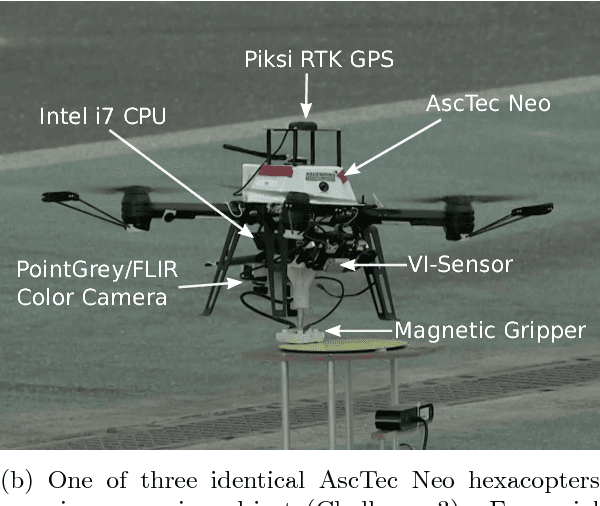
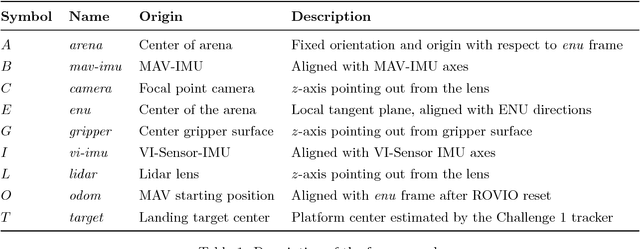
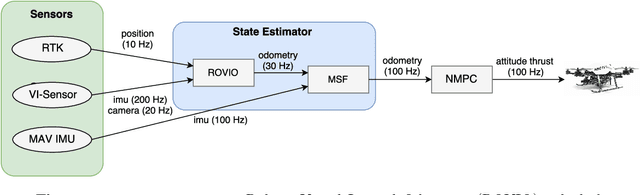
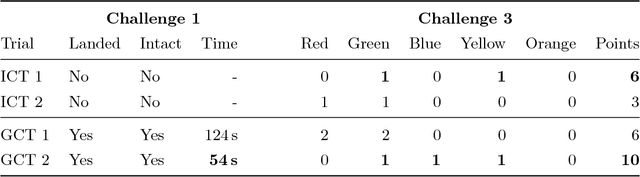
This article describes the hardware and software systems of the Micro Aerial Vehicle (MAV) platforms used by the ETH Zurich team in the 2017 Mohamed Bin Zayed International Robotics Challenge (MBZIRC). The aim was to develop robust outdoor platforms with the autonomous capabilities required for the competition, by applying and integrating knowledge from various fields, including computer vision, sensor fusion, optimal control, and probabilistic robotics. This paper presents the major components and structures of the system architectures, and reports on experimental findings for the MAV-based challenges in the competition. Main highlights include securing second place both in the individual search, pick, and place task of Challenge 3 and the Grand Challenge, with autonomous landing executed in less than one minute and a visual servoing success rate of over 90% for object pickups.
A Decentralized Multi-Agent Unmanned Aerial System to Search, Pick Up, and Relocate Objects
Sep 13, 2017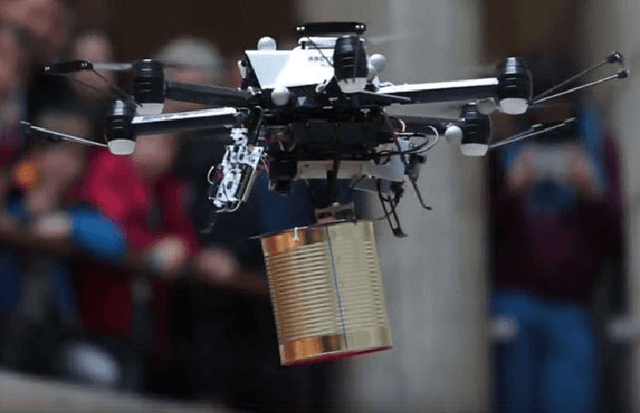
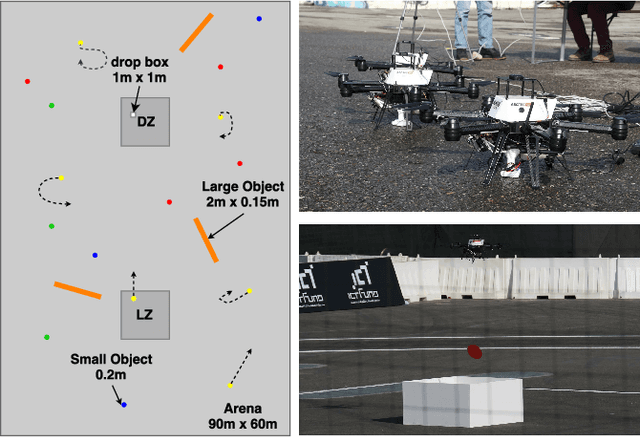

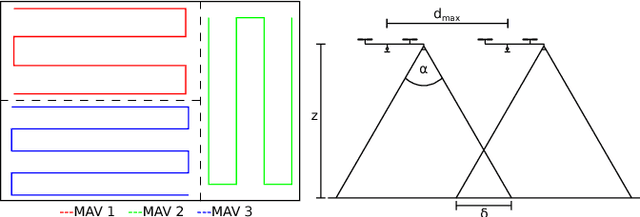
We present a fully integrated autonomous multi- robot aerial system for finding and collecting moving and static objects with unknown locations. This task addresses multiple relevant problems in search and rescue (SAR) robotics such as multi-agent aerial exploration, object detection and tracking, and aerial gripping. Usually, the community tackles these problems individually but the integration into a working system generates extra complexity which is rarely addressed. We show that this task can be solved reliably using only simple components. Our decentralized system uses accurate global state estimation, reactive collision avoidance, and sweep planning for multi-agent exploration. Objects are detected, tracked, and picked up using blob detection, inverse 3D-projection, Kalman filtering, visual-servoing, and a magnetic gripper. We evaluate the individual components of our system on the real platform. The full system has been deployed successfully in various public demonstrations, field tests, and the Mohamed Bin Zayed International Robotics Challenge 2017 (MBZIRC). Among the contestants we showed reliable performances and reached second place out of 17 in the individual challenge.
Sampling-based Motion Planning for Active Multirotor System Identification
Feb 05, 2017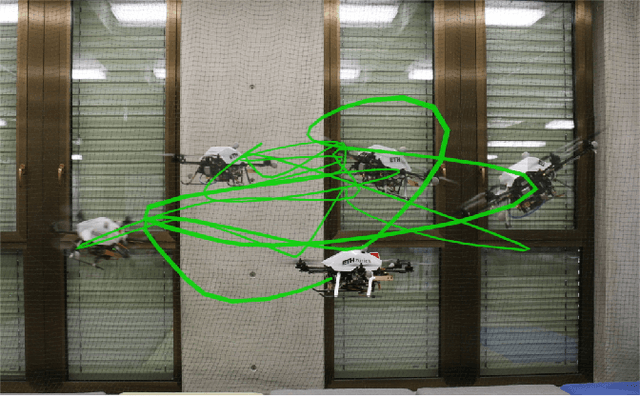
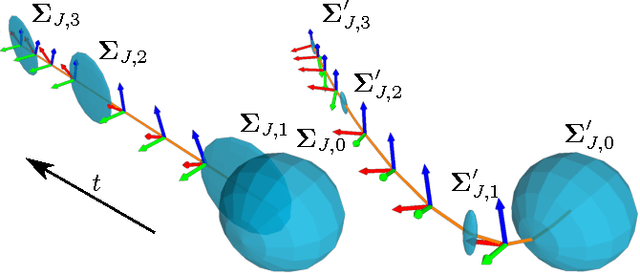
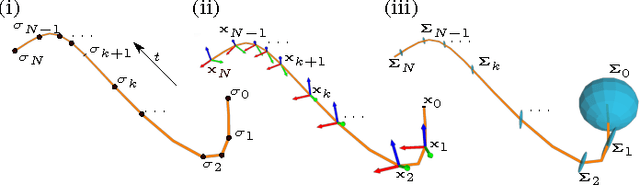
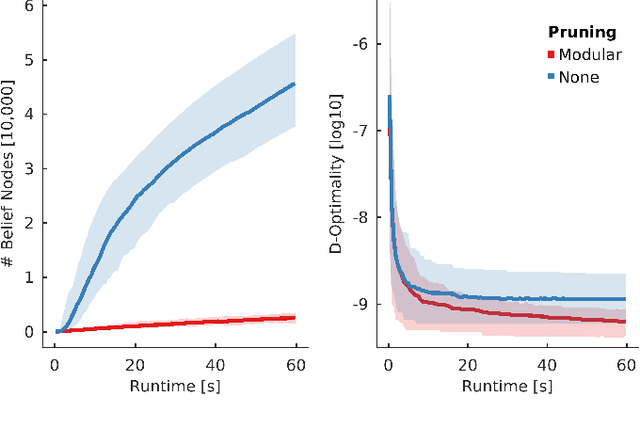
This paper reports on an algorithm for planning trajectories that allow a multirotor micro aerial vehicle (MAV) to quickly identify a set of unknown parameters. In many problems like self calibration or model parameter identification some states are only observable under a specific motion. These motions are often hard to find, especially for inexperienced users. Therefore, we consider system model identification in an active setting, where the vehicle autonomously decides what actions to take in order to quickly identify the model. Our algorithm approximates the belief dynamics of the system around a candidate trajectory using an extended Kalman filter (EKF). It uses sampling-based motion planning to explore the space of possible beliefs and find a maximally informative trajectory within a user-defined budget. We validate our method in simulation and on a real system showing the feasibility and repeatability of the proposed approach. Our planner creates trajectories which reduce model parameter convergence time and uncertainty by a factor of four.