 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Borne Digital Radar System for Coherent Multistatic SAR Imaging
Jul 28, 2025Advancements in analog-to-digital converter (ADC) technology have enabled higher sampling rates, making it feasible to adopt digital radar architectures that directly sample the radio-frequency (RF) signal, eliminating the need for analog downconversion. This digital approach supports greater flexibility in waveform design and signal processing, particularly through digital modulation schemes like orthogonal frequency division multiplexing (OFDM). This paper presents a digital radar system mounted on an uncrewed aerial vehicle (UAV), which employs OFDM waveforms for coherent multistatic synthetic aperture radar (SAR) imaging in the L-band. The radar setup features a primary UAV node responsible for signal transmission and monostatic data acquisition, alongside secondary nodes that operate in a receive-only mode. These secondary nodes capture the radar signal reflected from the scene as well as a direct sidelink signal. RF signals from both the radar and sidelink paths are sampled and processed offline. To manage data storage efficiently, a trigger mechanism is employed to record only the relevant portions of the radar signal. The system maintains coherency in both fast-time and slow-time domains, which is essential for multistatic SAR imaging. Because the secondary nodes are passive, the system can be easily scaled to accommodate a larger swarm of UAVs. The paper details the full signal processing workflow for both monostatic and multistatic SAR image formation, including an analysis and correction of synchronization errors that arise from the uncoupled operation of the nodes. The proposed coherent processing method is validated through static radar measurements, demonstrating coherency achieved by the concept. Additionally, a UAV-based bistatic SAR experiment demonstrates the system's performance by producing high-resolution monostatic, bistatic, and combined multistatic SAR images.
Indoor Synthetic Aperture Radar Measurements of Point-Like Targets Using a Wheeled Mobile Robot
Apr 30, 2024



Small, low-cost radar sensors offer a lighting independent sensing capability for indoor mobile robots that is useful for localization and mapping. Synthetic aperture radar (SAR) offers an attractive way to increase the angular resolution of small radar sensors for use on mobile robots to generate high-resolution maps of the indoor environment. This work quantifies the maximum synthesizable aperture length of our mobile robot measurement setup using radar-inertial odometry localization and offers insights into challenges for robotic millimeter-wave SAR imaging.
Gesture Recognition with Keypoint and Radar Stream Fusion for Automated Vehicles
Feb 20, 2023We present a joint camera and radar approach to enable autonomous vehicles to understand and react to human gestures in everyday traffic. Initially, we process the radar data with a PointNet followed by a spatio-temporal multilayer perceptron (stMLP). Independently, the human body pose is extracted from the camera frame and processed with a separate stMLP network. We propose a fusion neural network for both modalities, including an auxiliary loss for each modality. In our experiments with a collected dataset, we show the advantages of gesture recognition with two modalities. Motivated by adverse weather conditions, we also demonstrate promising performance when one of the sensors lacks functionality.
* Accepted for presentation at the 3rd AVVision Workshop at ECCV 2022, October 23, 2022, Tel Aviv, Israel
Under the Sand: Navigation and Localization of a Small Unmanned Aerial Vehicle for Landmine Detection with Ground Penetrating Synthetic Aperture Radar
Jun 18, 2021
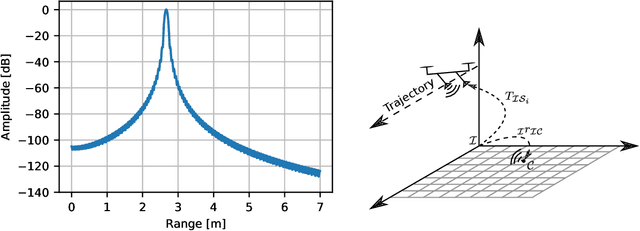

Ground penetrating radar mounted on a small unmanned aerial vehicle (UAV) is a promising tool to assist humanitarian landmine clearance. However, the quality of synthetic aperture radar images depends on accurate and precise motion estimation of the radar antennas as well as generating informative viewpoints with the UAV. This paper presents a complete and automatic airborne ground-penetrating synthetic aperture radar (GPSAR) system. The system consists of a spatially calibrated and temporally synchronized industrial grade sensor suite that enables navigation above ground level, radar imaging, and optical imaging. A custom mission planning framework allows generation and automatic execution of stripmap and circular GPSAR trajectories controlled above ground level as well as aerial imaging survey flights. A factor graph based state estimator fuses measurements from dual receiver real-time kinematic (RTK) global navigation satellite system (GNSS) and an inertial measurement unit (IMU) to obtain precise, high rate platform positions and orientations. Ground truth experiments showed sensor timing as accurate as 0.8 {\mu}s and as precise as 0.1 {\mu}s with localization rates of 1 kHz. The dual position factor formulation improves online localization accuracy up to 40 % and batch localization accuracy up to 59 % compared to a single position factor with uncertain heading initialization. Our field trials validated a localization accuracy and precision that enables coherent radar measurement addition and detection of radar targets buried in sand. This validates the potential as an aerial landmine detection system.