 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe ETH-MAV Team in the MBZ International Robotics Challenge
Mar 21, 2018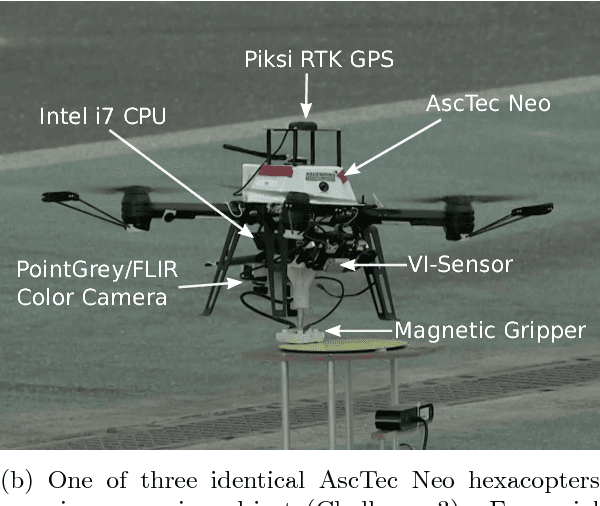
This article describes the hardware and software systems of the Micro Aerial Vehicle (MAV) platforms used by the ETH Zurich team in the 2017 Mohamed Bin Zayed International Robotics Challenge (MBZIRC). The aim was to develop robust outdoor platforms with the autonomous capabilities required for the competition, by applying and integrating knowledge from various fields, including computer vision, sensor fusion, optimal control, and probabilistic robotics. This paper presents the major components and structures of the system architectures, and reports on experimental findings for the MAV-based challenges in the competition. Main highlights include securing second place both in the individual search, pick, and place task of Challenge 3 and the Grand Challenge, with autonomous landing executed in less than one minute and a visual servoing success rate of over 90% for object pickups.
A Decentralized Multi-Agent Unmanned Aerial System to Search, Pick Up, and Relocate Objects
Sep 13, 2017
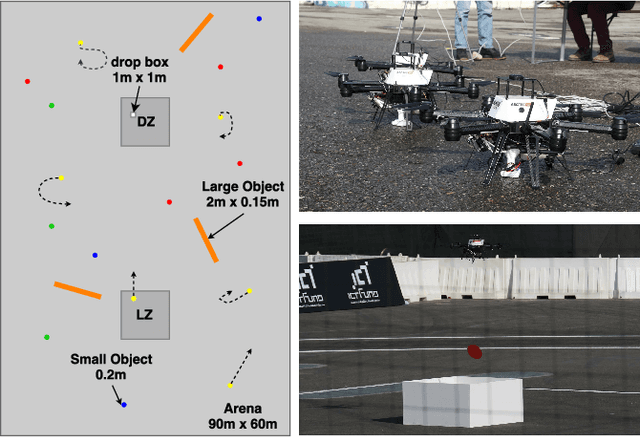

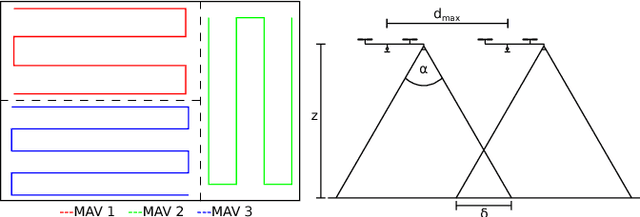
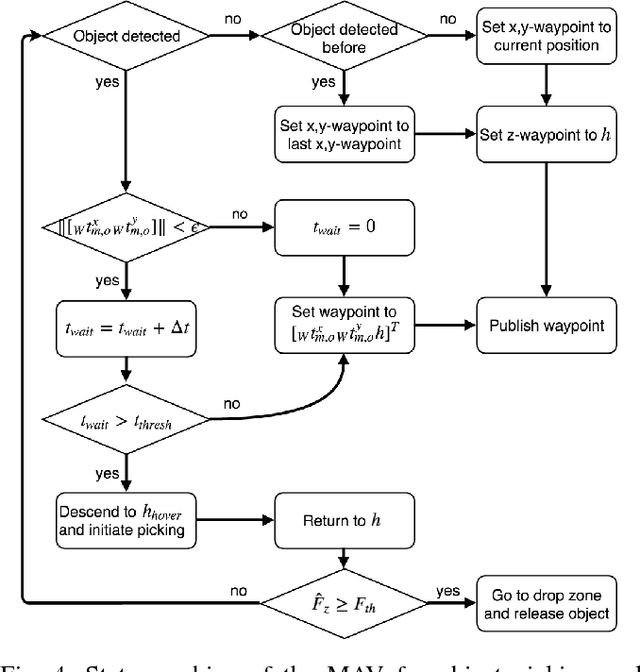
We present a fully integrated autonomous multi- robot aerial system for finding and collecting moving and static objects with unknown locations. This task addresses multiple relevant problems in search and rescue (SAR) robotics such as multi-agent aerial exploration, object detection and tracking, and aerial gripping. Usually, the community tackles these problems individually but the integration into a working system generates extra complexity which is rarely addressed. We show that this task can be solved reliably using only simple components. Our decentralized system uses accurate global state estimation, reactive collision avoidance, and sweep planning for multi-agent exploration. Objects are detected, tracked, and picked up using blob detection, inverse 3D-projection, Kalman filtering, visual-servoing, and a magnetic gripper. We evaluate the individual components of our system on the real platform. The full system has been deployed successfully in various public demonstrations, field tests, and the Mohamed Bin Zayed International Robotics Challenge 2017 (MBZIRC). Among the contestants we showed reliable performances and reached second place out of 17 in the individual challenge.
Aerial Picking and Delivery of Magnetic Objects with MAVs
Dec 08, 2016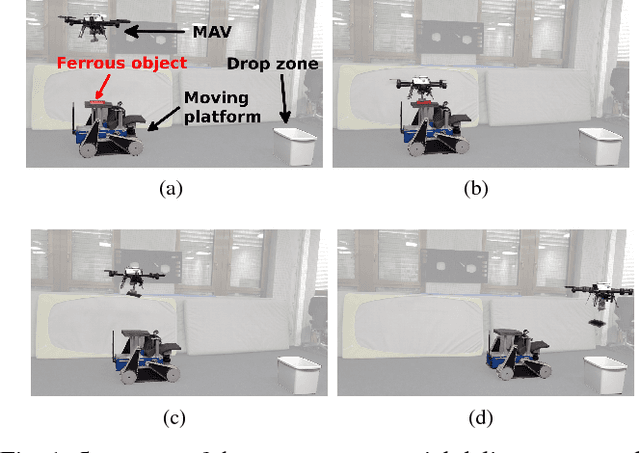
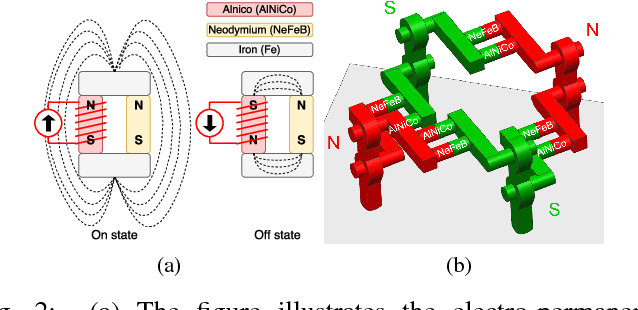
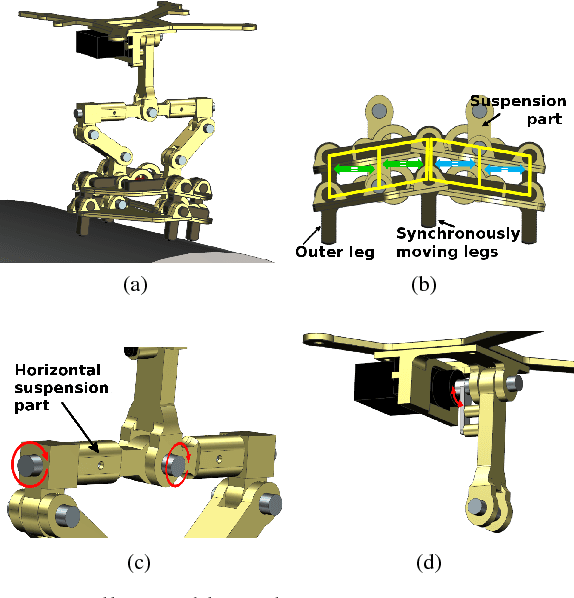
Autonomous delivery of goods using a MAV is a difficult problem, as it poses high demand on the MAV's control, perception and manipulation capabilities. This problem is especially challenging if the exact shape, location and configuration of the objects are unknown. In this paper, we report our findings during the development and evaluation of a fully integrated system that is energy efficient and enables MAVs to pick up and deliver objects with partly ferrous surface of varying shapes and weights. This is achieved by using a novel combination of an electro-permanent magnetic gripper with a passively compliant structure and integration with detection, control and servo positioning algorithms. The system's ability to grasp stationary and moving objects was tested, as well as its ability to cope with different shapes of the object and external disturbances. We show that such a system can be successfully deployed in scenarios where an object with partly ferrous parts needs to be gripped and placed in a predetermined location.