 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Civil Infrastructure Visual Defect Detection: ev-CIVIL Dataset and Benchmark
Apr 08, 2025Small Unmanned Aerial Vehicle (UAV) based visual inspections are a more efficient alternative to manual methods for examining civil structural defects, offering safe access to hazardous areas and significant cost savings by reducing labor requirements. However, traditional frame-based cameras, widely used in UAV-based inspections, often struggle to capture defects under low or dynamic lighting conditions. In contrast, Dynamic Vision Sensors (DVS), or event-based cameras, excel in such scenarios by minimizing motion blur, enhancing power efficiency, and maintaining high-quality imaging across diverse lighting conditions without saturation or information loss. Despite these advantages, existing research lacks studies exploring the feasibility of using DVS for detecting civil structural defects.Moreover, there is no dedicated event-based dataset tailored for this purpose. Addressing this gap, this study introduces the first event-based civil infrastructure defect detection dataset, capturing defective surfaces as a spatio-temporal event stream using DVS.In addition to event-based data, the dataset includes grayscale intensity image frames captured simultaneously using an Active Pixel Sensor (APS). Both data types were collected using the DAVIS346 camera, which integrates DVS and APS sensors.The dataset focuses on two types of defects: cracks and spalling, and includes data from both field and laboratory environments. The field dataset comprises 318 recording sequences,documenting 458 distinct cracks and 121 distinct spalling instances.The laboratory dataset includes 362 recording sequences, covering 220 distinct cracks and 308 spalling instances.Four realtime object detection models were evaluated on it to validate the dataset effectiveness.The results demonstrate the dataset robustness in enabling accurate defect detection and classification,even under challenging lighting conditions.
Enhancing Tool Manipulation of An Aerial Vehicle with A Dynamically Displacing Center-of-Mass
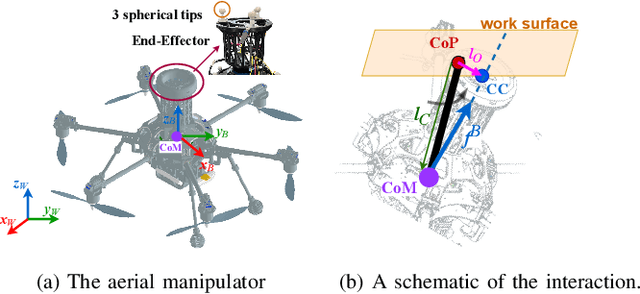
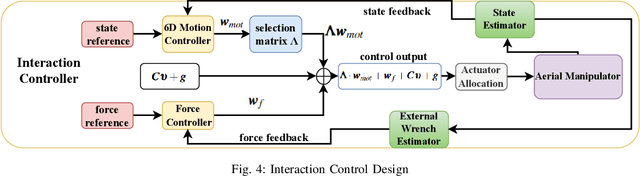
Oct 30, 2024As aerial robots gain traction in industrial applications, there is growing interest in enhancing their physical interaction capabilities. Pushing tasks performed by aerial manipulators have been successfully demonstrated in contact-based inspections. However, more complex industrial applications require these systems to support higher-DoF (Degree of Freedom) manipulators and generate larger forces while pushing (e.g., drilling, grinding). This paper builds on our previous work, where we introduced an aerial vehicle with a dynamically displacing CoM (Center of Mass) to improve force exertion during interactions. We propose a novel approach to further enhance this system's force generation by optimizing its CoM location during interactions. Additionally, we study the case of this aerial vehicle equipped with a 2-DoF manipulation arm to extend the system's functionality in tool-based tasks. The effectiveness of the proposed methods is validated through simulations, demonstrating the potential of this system for advanced aerial manipulation in practical settings.
Assisted Physical Interaction: Autonomous Aerial Robots with Neural Network Detection, Navigation, and Safety Layers
Oct 21, 2024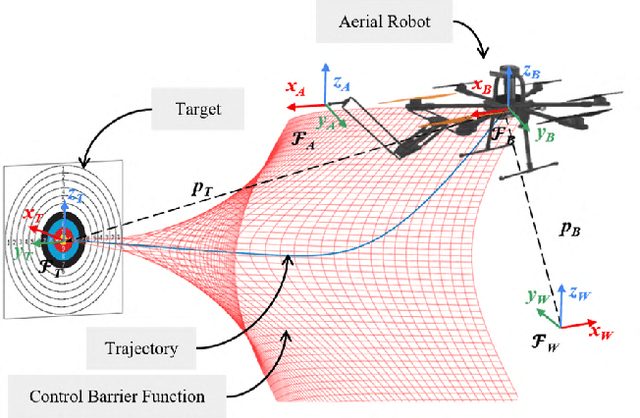

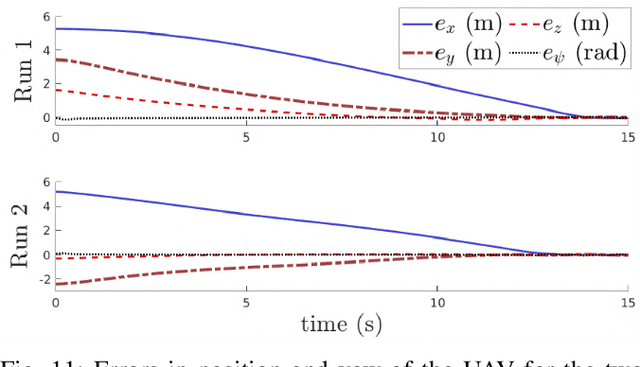

The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.
* 8 pages,14 figures, ICUAS 2024
AEROBULL: A Center-of-Mass Displacing Aerial Vehicle Enabling Efficient High-Force Interaction
Aug 27, 2024



In various industrial sectors, inspection and maintenance tasks using UAV (Unmanned Aerial Vehicle) require substantial force application to ensure effective adherence and stable contact, posing significant challenges to existing solutions. This paper addresses these industrial needs by introducing a novel lightweight aerial platform (3.12kg) designed to exert high pushing forces on non-horizontal surfaces. To increase maneuverability, the proposed platform incorporates tiltable rotors with 5-DoF (Degree of Freedom) actuation. Moreover, it has an innovative shifting-mass mechanism that dynamically adjusts the system's CoM (Center of Mass) during contact-based task execution. A compliant EE (End-Effector) is applied to ensure a smooth interaction with the work surface. We provide a detailed study of the UAV's overall system design, hardware integration of the developed physical prototype, and software architecture of the proposed control algorithm. Physical experiments were conducted to validate the control design and explore the force generation capability of the designed platform via a pushing task. With a total mass of 3.12kg, the UAV exerted a maximum pushing force of above 28N being almost equal to its gravity force. Furthermore, the experiments illustrated the benefits of having displaced CoM by benchmarking with a fixed CoM configuration.
Optimal Distributed Multi-Robot Communication-Aware Trajectory Planning using Alternating Direction Method of Multipliers
Aug 09, 2024This paper presents a distributed, optimal, communication-aware trajectory planning algorithm for multi-robot systems. Building on prior work, it addresses the multi-robot communication-aware trajectory planning problem using a general optimisation framework that imposes linear constraints on changes in robot positions to ensure communication performance and collision avoidance. In this paper, the optimisation problem is solved distributively by separating the communication performance constraint through an economic approach. Here, the current communication budget is distributed equally among the robots, and the robots are allowed to trade parts of their budgets with each other. The separated optimisation problem is then solved using the consensus alternating direction method of multipliers. The method was verified through simulation in an inspection task problem.
Optimal Multi-Robot Communication-Aware Trajectory Planning by Constraining the Fiedler Value
Jun 26, 2024The paper present a novel approach for the solution of the Multi-Robot Communication-Aware Trajectory Planning, which builds on a general optimisation framework where the changes in robots positions are used as decision variable, and linear constraints on the trajectories of the robots are introduced to ensure communication performance and collision avoidance. The Fiedler value is adopted as communication performance metric. The validity of the method in computing both feasible and optimal trajectories for the robots is demonstrated both in simulation and experimentally. Results show that the constraint on the Fiedler value ensures that the robot network fulfils its objective while maintaining communication connectivity at all times. Further, the paper shows that the introduction of approximations for the constraints enables a significant improvement in the computational time of the solution, which remain very close to the optimal solution.
Multi-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
May 29, 2024
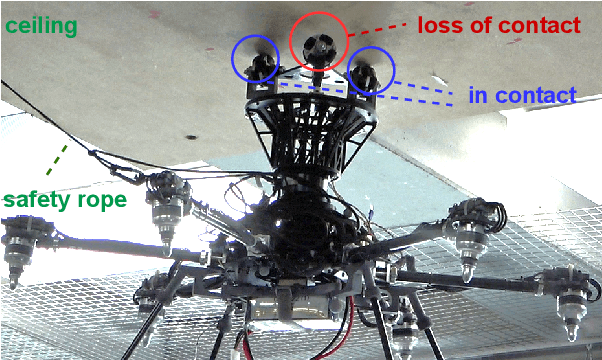
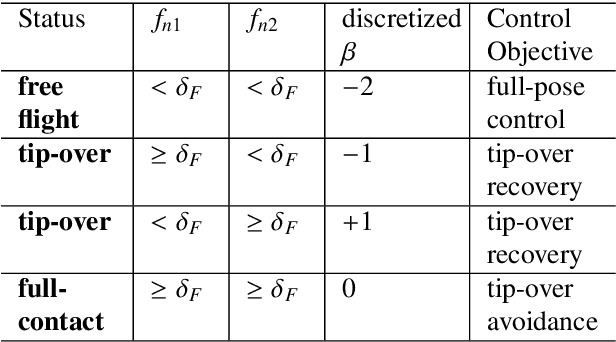
Push-and-slide tasks carried out by fully-actuated aerial robots can be used for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Often, an end-effector based on multiple non-actuated contact wheels is used to contact the surface. This approach entails challenges in ensuring consistent wheel contact with a surface whose exact orientation and location might be uncertain due to sensor aliasing and drift. Using a standard full-pose controller dependent on the inaccurate surface position and orientation may cause wheels to lose contact during sliding, and subsequently lead to robot tip-over. To address the tip-over issue, we present two approaches: (1) tip-over avoidance guidelines for hardware design, and (2) control for tip-over recovery and avoidance. Physical experiments with a fully-actuated aerial vehicle were executed for a push-and-slide task on a flat surface. The resulting data is used in deriving tip-over avoidance guidelines and designing a simulator that closely captures real-world conditions. We then use the simulator to test the effectiveness and robustness of the proposed approaches in risky scenarios against uncertainties.
A Center-of-Mass Shifting Aerial Manipulation Platform for Heavy-Tool Handling on Non-Horizontal Surfaces
Apr 01, 2024Aerial vehicles equipped with manipulators can serve contact-based industrial applications, where fundamental tasks like drilling and grinding often necessitate aerial platforms to handle heavy tools. Industrial environments often involve non-horizontal surfaces. Existing aerial manipulation platforms based on multirotors typically feature a fixed CoM (Center of Mass) within the rotor-defined area, leading to a considerable moment arm between the EE (End-Effector) tip and the CoM for operations on such surfaces. Carrying heavy tools at the EE tip of the manipulator with an extended moment arm can lead to system instability and potential damage to the servo actuators used in the manipulator. To tackle this issue, we present a novel aerial vehicle tailored for handling heavy tools on non-horizontal surfaces. In this work, we provide the platform's system design, modeling, and control strategies. This platform can carry heavy manipulators within the rotor-defined area during free flight. During interactions, the manipulator can shift towards the work surface outside the rotor-defined area, resulting in a displaced CoM location with a significantly shorter moment arm. Furthermore, we propose a method for automatically determining the manipulator's position to reach the maximum CoM displacement towards the work surface. Our proposed concepts are validated through simulations that closely capture the developed physical prototype of the platform.
Passive Aligning Physical Interaction of Fully-Actuated Aerial Vehicles for Pushing Tasks
Feb 27, 2024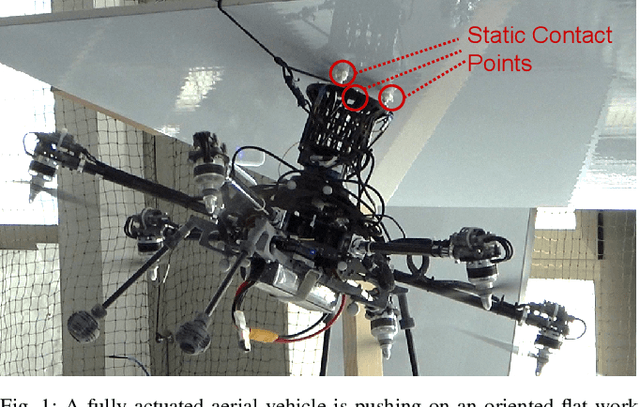
Recently, the utilization of aerial manipulators for performing pushing tasks in non-destructive testing (NDT) applications has seen significant growth. Such operations entail physical interactions between the aerial robotic system and the environment. End-effectors with multiple contact points are often used for placing NDT sensors in contact with a surface to be inspected. Aligning the NDT sensor and the work surface while preserving contact, requires that all available contact points at the end-effector tip are in contact with the work surface. With a standard full-pose controller, attitude errors often occur due to perturbations caused by modeling uncertainties, sensor noise, and environmental uncertainties. Even small attitude errors can cause a loss of contact points between the end-effector tip and the work surface. To preserve full alignment amidst these uncertainties, we propose a control strategy which selectively deactivates angular motion control and enables direct force control in specific directions. In particular, we derive two essential conditions to be met, such that the robot can passively align with flat work surfaces achieving full alignment through the rotation along non-actively controlled axes. Additionally, these conditions serve as hardware design and control guidelines for effectively integrating the proposed control method for practical usage. Real world experiments are conducted to validate both the control design and the guidelines.
Safety-Conscious Pushing on Diverse Oriented Surfaces with Underactuated Aerial Vehicles
Feb 23, 2024Pushing tasks performed by aerial manipulators can be used for contact-based industrial inspections. Underactuated aerial vehicles are widely employed in aerial manipulation due to their widespread availability and relatively low cost. Industrial infrastructures often consist of diverse oriented work surfaces. When interacting with such surfaces, the coupled gravity compensation and interaction force generation of underactuated aerial vehicles can present the potential challenge of near-saturation operations. The blind utilization of these platforms for such tasks can lead to instability and accidents, creating unsafe operating conditions and potentially damaging the platform. In order to ensure safe pushing on these surfaces while managing platform saturation, this work establishes a safety assessment process. This process involves the prediction of the saturation level of each actuator during pushing across variable surface orientations. Furthermore, the assessment results are used to plan and execute physical experiments, ensuring safe operations and preventing platform damage.