 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Point Cloud Data Transmission via L4S for 5G-Edge-Assisted Robotics
Nov 11, 2025This article presents a novel framework for real-time Light Detection and Ranging (LiDAR) data transmission that leverages rate-adaptive technologies and point cloud encoding methods to ensure low-latency, and low-loss data streaming. The proposed framework is intended for, but not limited to, robotic applications that require real-time data transmission over the internet for offloaded processing. Specifically, the Low Latency, Low Loss, Scalable Throughput L4S-enabled SCReAM v2 transmission framework is extended to incorporate the Draco geometry compression algorithm, enabling dynamic compression of high-bitrate 3D LiDAR data according to the sensed channel capacity and network load. The low-latency 3D LiDAR streaming system is designed to maintain minimal end-to-end delay while constraining encoding errors to meet the accuracy requirements of robotic applications. We demonstrate the effectiveness of the proposed method through real-world experiments conducted over a public 5G network across multi-kilometer urban environments. The low-latency and low-loss requirements are preserved, while real-time offloading and evaluation of 3D SLAM algorithms are used to validate the framework's performance in practical use cases.
Cloud-Assisted Remote Control for Aerial Robots: From Theory to Proof-of-Concept Implementation
Sep 04, 2025Cloud robotics has emerged as a promising technology for robotics applications due to its advantages of offloading computationally intensive tasks, facilitating data sharing, and enhancing robot coordination. However, integrating cloud computing with robotics remains a complex challenge due to network latency, security concerns, and the need for efficient resource management. In this work, we present a scalable and intuitive framework for testing cloud and edge robotic systems. The framework consists of two main components enabled by containerized technology: (a) a containerized cloud cluster and (b) the containerized robot simulation environment. The system incorporates two endpoints of a User Datagram Protocol (UDP) tunnel, enabling bidirectional communication between the cloud cluster container and the robot simulation environment, while simulating realistic network conditions. To achieve this, we consider the use case of cloud-assisted remote control for aerial robots, while utilizing Linux-based traffic control to introduce artificial delay and jitter, replicating variable network conditions encountered in practical cloud-robot deployments.
* 6 pages, 7 figures, CCGridW 2025
Combined Aerial Cooperative Tethered Carrying and Path Planning for Quadrotors in Confined Environments
Apr 01, 2025In this article, a novel combined aerial cooperative tethered carrying and path planning framework is introduced with a special focus on applications in confined environments. The proposed work is aiming towards solving the path planning problem for the formation of two quadrotors, while having a rope hanging below them and passing through or around obstacles. A novel composition mechanism is proposed, which simplifies the degrees of freedom of the combined aerial system and expresses the corresponding states in a compact form. Given the state of the composition, a dynamic body is generated that encapsulates the quadrotors-rope system and makes the procedure of collision checking between the system and the environment more efficient. By utilizing the above two abstractions, an RRT path planning scheme is implemented and a collision-free path for the formation is generated. This path is decomposed back to the quadrotors' desired positions that are fed to the Model Predictive Controller (MPC) for each one. The efficiency of the proposed framework is experimentally evaluated.
Barriers on the EDGE: A scalable CBF architecture over EDGE for safe aerial-ground multi-agent coordination
Nov 25, 2024In this article, we address the problem of designing a scalable control architecture for a safe coordinated operation of a multi-agent system with aerial (UAVs) and ground robots (UGVs) in a confined task space. The proposed method uses Control Barrier Functions (CBFs) to impose constraints associated with (i) collision avoidance between agents, (ii) landing of UAVs on mobile UGVs, and (iii) task space restriction. Further, to account for the rapid increase in the number of constraints for a single agent with the increasing number of agents, the proposed architecture uses a centralized-decentralized Edge cluster, where a centralized node (Watcher) activates the relevant constraints, reducing the need for high onboard processing and network complexity. The distributed nodes run the controller locally to overcome latency and network issues. The proposed Edge architecture is experimentally validated using multiple aerial and ground robots in a confined environment performing a coordinated operation.
Assisted Physical Interaction: Autonomous Aerial Robots with Neural Network Detection, Navigation, and Safety Layers
Oct 21, 2024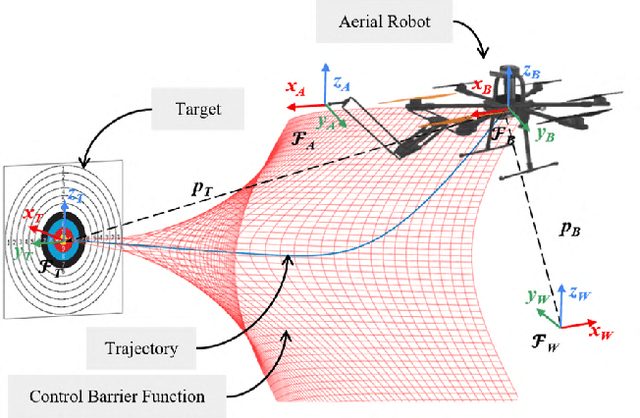

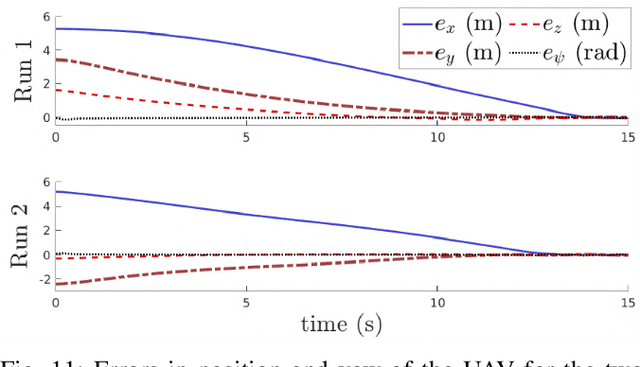

The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.
* 8 pages,14 figures, ICUAS 2024
Design of a Flexible Robot Arm for Safe Aerial Physical Interaction
Oct 21, 2024



This paper introduces a novel compliant mechanism combining lightweight and energy dissipation for aerial physical interaction. Weighting 400~g at take-off, the mechanism is actuated in the forward body direction, enabling precise position control for force interaction and various other aerial manipulation tasks. The robotic arm, structured as a closed-loop kinematic chain, employs two deported servomotors. Each joint is actuated with a single tendon for active motion control in compression of the arm at the end-effector. Its elasto-mechanical design reduces weight and provides flexibility, allowing passive-compliant interactions without impacting the motors' integrity. Notably, the arm's damping can be adjusted based on the proposed inner frictional bulges. Experimental applications showcase the aerial system performance in both free-flight and physical interaction. The presented work may open safer applications for \ac{MAV} in real environments subject to perturbations during interaction.
* 6 pages, 7 figures, ROBOSOFT 2024
Cloud-Based Scheduling Mechanism for Scalable and Resource-Efficient Centralized Controllers
Oct 07, 2024This paper proposes a novel approach to address the challenges of deploying complex robotic software in large-scale systems, i.e., Centralized Nonlinear Model Predictive Controllers (CNMPCs) for multi-agent systems. The proposed approach is based on a Kubernetes-based scheduling mechanism designed to monitor and optimize the operation of CNMPCs, while addressing the scalability limitation of centralized control schemes. By leveraging a cluster in a real-time cloud environment, the proposed mechanism effectively offloads the computational burden of CNMPCs. Through experiments, we have demonstrated the effectiveness and performance of our system, especially in scenarios where the number of robots is subject to change. Our work contributes to the advancement of cloud-based control strategies and lays the foundation for enhanced performance in cloud-controlled robotic systems.
A Resilient Framework for 5G-Edge-Connected UAVs based on Switching Edge-MPC and Onboard-PID Control
Oct 24, 2023In recent years, the need for resources for handling processes with high computational complexity for mobile robots is becoming increasingly urgent. More specifically, robots need to autonomously operate in a robust and continuous manner, while keeping high performance, a need that led to the utilization of edge computing to offload many computationally demanding and time-critical robotic procedures. However, safe mechanisms should be implemented to handle situations when it is not possible to use the offloaded procedures, such as if the communication is challenged or the edge cluster is not available. To this end, this article presents a switching strategy for safety, redundancy, and optimized behavior through an edge computing-based Model Predictive Controller (MPC) and a low-level onboard-PID controller for edge-connected Unmanned Aerial Vehicles (UAVs). The switching strategy is based on the communication Key Performance Indicators (KPIs) over 5G to decide whether the UAV should be controlled by the edge-based or have a safe fallback based on the onboard controller.
* 8 pages, 9 figures, isie2023
A Kubernetes-Based Edge Architecture for Controlling the Trajectory of a Resource-Constrained Aerial Robot by Enabling Model Predictive Control
Jan 31, 2023In recent years, cloud and edge architectures have gained tremendous focus for offloading computationally heavy applications. From machine learning and Internet of Thing (IOT) to industrial procedures and robotics, cloud computing have been used extensively for data processing and storage purposes, thanks to its "infinite" resources. On the other hand, cloud computing is characterized by long time delays due to the long distance between the cloud servers and the machine requesting the resources. In contrast, edge computing provides almost real-time services since edge servers are located significantly closer to the source of data. This capability sets edge computing as an ideal option for real-time applications, like high level control, for resource-constrained platforms. In order to utilize the edge resources, several technologies, with basic ones as containers and orchestrators like Kubernetes, have been developed to provide an environment with many features, based on each application's requirements. In this context, this works presents the implementation and evaluation of a novel edge architecture based on Kubernetes orchestration for controlling the trajectory of a resource-constrained Unmanned Aerial Vehicle (UAV) by enabling Model Predictive Control (MPC).
* 6 pages, 6 figures, conference article, CSCC 2022
PACED-5G: Predictive Autonomous Control using Edge for Drones over 5G
Jan 30, 2023



With the advent of technologies such as Edge computing, the horizons of remote computational applications have broadened multidimensionally. Autonomous Unmanned Aerial Vehicle (UAV) mission is a vital application to utilize remote computation to catalyze its performance. However, offloading computational complexity to a remote system increases the latency in the system. Though technologies such as 5G networking minimize communication latency, the effects of latency on the control of UAVs are inevitable and may destabilize the system. Hence, it is essential to consider the delays in the system and compensate for them in the control design. Therefore, we propose a novel Edge-based predictive control architecture enabled by 5G networking, PACED-5G (Predictive Autonomous Control using Edge for Drones over 5G). In the proposed control architecture, we have designed a state estimator for estimating the current states based on the available knowledge of the time-varying delays, devised a Model Predictive controller (MPC) for the UAV to track the reference trajectory while avoiding obstacles, and provided an interface to offload the high-level tasks over Edge systems. The proposed architecture is validated in two experimental test cases using a quadrotor UAV.