 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPADE: Towards Scalable Path Planning Architecture on Actionable Multi-Domain 3D Scene Graphs
May 25, 2025In this work, we introduce SPADE, a path planning framework designed for autonomous navigation in dynamic environments using 3D scene graphs. SPADE combines hierarchical path planning with local geometric awareness to enable collision-free movement in dynamic scenes. The framework bifurcates the planning problem into two: (a) solving the sparse abstract global layer plan and (b) iterative path refinement across denser lower local layers in step with local geometric scene navigation. To ensure efficient extraction of a feasible route in a dense multi-task domain scene graphs, the framework enforces informed sampling of traversable edges prior to path-planning. This removes extraneous information not relevant to path-planning and reduces the overall planning complexity over a graph. Existing approaches address the problem of path planning over scene graphs by decoupling hierarchical and geometric path evaluation processes. Specifically, this results in an inefficient replanning over the entire scene graph when encountering path obstructions blocking the original route. In contrast, SPADE prioritizes local layer planning coupled with local geometric scene navigation, enabling navigation through dynamic scenes while maintaining efficiency in computing a traversable route. We validate SPADE through extensive simulation experiments and real-world deployment on a quadrupedal robot, demonstrating its efficacy in handling complex and dynamic scenarios.
Collision-free landing of multiple UAVs on moving ground vehicles using time-varying control barrier functions
Apr 08, 2025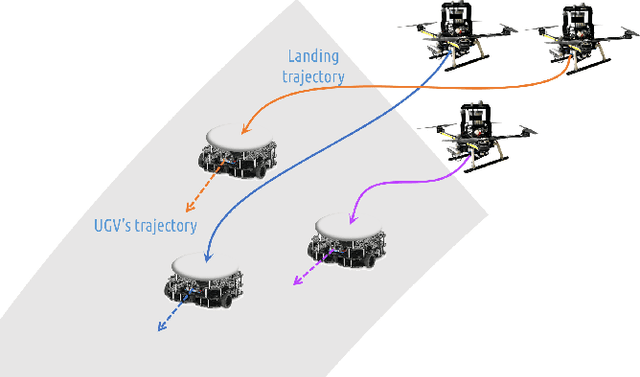
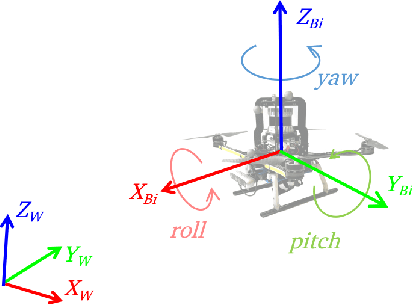
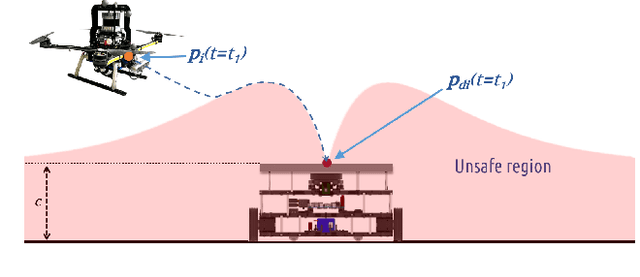
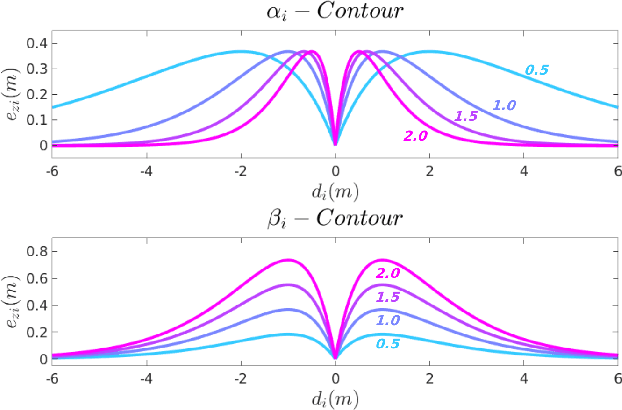
In this article, we present a centralized approach for the control of multiple unmanned aerial vehicles (UAVs) for landing on moving unmanned ground vehicles (UGVs) using control barrier functions (CBFs). The proposed control framework employs two kinds of CBFs to impose safety constraints on the UAVs' motion. The first class of CBFs (LCBF) is a three-dimensional exponentially decaying function centered above the landing platform, designed to safely and precisely land UAVs on the UGVs. The second set is a spherical CBF (SCBF), defined between every pair of UAVs, which avoids collisions between them. The LCBF is time-varying and adapts to the motions of the UGVs. In the proposed CBF approach, the control input from the UAV's nominal tracking controller designed to reach the landing platform is filtered to choose a minimally-deviating control input that ensures safety (as defined by the CBFs). As the control inputs of every UAV are shared in establishing multiple CBF constraints, we prove that the control inputs are shared without conflict in rendering the safe sets forward invariant. The performance of the control framework is validated through a simulated scenario involving three UAVs landing on three moving targets.
Barriers on the EDGE: A scalable CBF architecture over EDGE for safe aerial-ground multi-agent coordination
Nov 25, 2024In this article, we address the problem of designing a scalable control architecture for a safe coordinated operation of a multi-agent system with aerial (UAVs) and ground robots (UGVs) in a confined task space. The proposed method uses Control Barrier Functions (CBFs) to impose constraints associated with (i) collision avoidance between agents, (ii) landing of UAVs on mobile UGVs, and (iii) task space restriction. Further, to account for the rapid increase in the number of constraints for a single agent with the increasing number of agents, the proposed architecture uses a centralized-decentralized Edge cluster, where a centralized node (Watcher) activates the relevant constraints, reducing the need for high onboard processing and network complexity. The distributed nodes run the controller locally to overcome latency and network issues. The proposed Edge architecture is experimentally validated using multiple aerial and ground robots in a confined environment performing a coordinated operation.
A CBF-Adaptive Control Architecture for Visual Navigation for UAV in the Presence of Uncertainties
Feb 16, 2024In this article, we propose a control solution for the safe transfer of a quadrotor UAV between two surface robots positioning itself only using the visual features on the surface robots, which enforces safety constraints for precise landing and visual locking, in the presence of modeling uncertainties and external disturbances. The controller handles the ascending and descending phases of the navigation using a visual locking control barrier function (VCBF) and a parametrizable switching descending CBF (DCBF) respectively, eliminating the need for an external planner. The control scheme has a backstepping approach for the position controller with the CBF filter acting on the position kinematics to produce a filtered virtual velocity control input, which is tracked by an adaptive controller to overcome modeling uncertainties and external disturbances. The experimental validation is carried out with a UAV that navigates from the base to the target using an RGB camera.
Vision Based Docking of Multiple Satellites with an Uncooperative Target
Mar 16, 2023



With the ever growing number of space debris in orbit, the need to prevent further space population is becoming more and more apparent. Refueling, servicing, inspection and deorbiting of spacecraft are some example missions that require precise navigation and docking in space. Having multiple, collaborating robots handling these tasks can greatly increase the efficiency of the mission in terms of time and cost. This article will introduce a modern and efficient control architecture for satellites on collaborative docking missions. The proposed architecture uses a centralized scheme that combines state-of-the-art, ad-hoc implementations of algorithms and techniques to maximize robustness and flexibility. It is based on a Model Predictive Controller (MPC) for which efficient cost function and constraint sets are designed to ensure a safe and accurate docking. A simulation environment is also presented to validate and test the proposed control scheme.
Safe Autonomous Docking Maneuvers for a Floating Platform based on Input Sharing Control Barrier Functions
Sep 14, 2022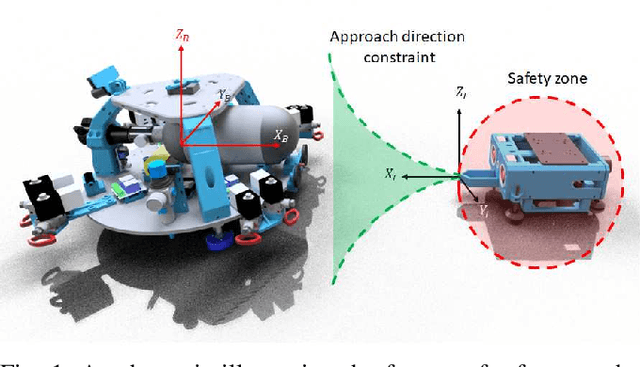
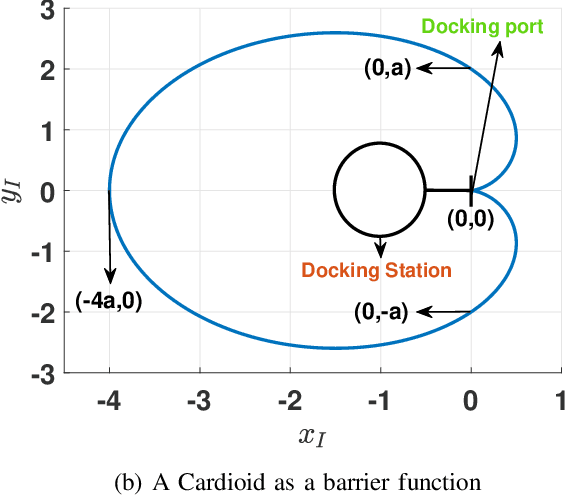
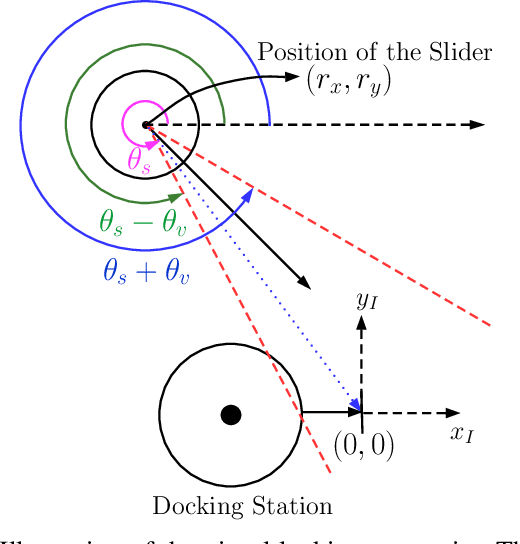
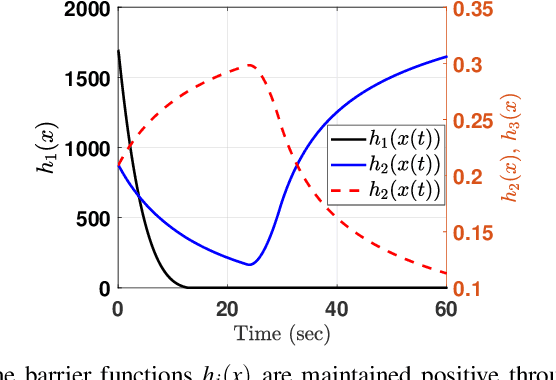
In this article, we present a control strategy for the problem of safe autonomous docking for a planar floating platform (Slider) that emulates the movement of a satellite. Employing the proposed strategy, Slider approaches a docking port with the right orientation, maintaining a safe distance, while always keeping a visual lock on the docking port throughout the docking maneuver. Control barrier functions are designed to impose the safety, direction of approach and visual locking constraints. Three control inputs of the Slider are shared among three barrier functions in enforcing the constraints. It is proved that the control inputs are shared in a conflict-free manner in rendering the sets defining safety and visual locking constraints forward invariant and in establishing finite-time convergence to the visual locking mode. The conflict-free input-sharing ensures the feasibility of a quadratic program that generates minimally-invasive corrections for a nominal controller, that is designed to track the docking port, so that the barrier constraints are respected throughout the docking maneuver. The efficacy of the proposed control design approach is validated through various simulations.