 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-free landing of multiple UAVs on moving ground vehicles using time-varying control barrier functions
Paper and Code
Apr 08, 2025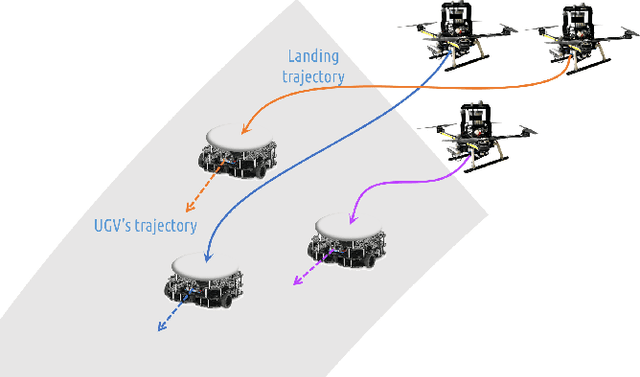
In this article, we present a centralized approach for the control of multiple unmanned aerial vehicles (UAVs) for landing on moving unmanned ground vehicles (UGVs) using control barrier functions (CBFs). The proposed control framework employs two kinds of CBFs to impose safety constraints on the UAVs' motion. The first class of CBFs (LCBF) is a three-dimensional exponentially decaying function centered above the landing platform, designed to safely and precisely land UAVs on the UGVs. The second set is a spherical CBF (SCBF), defined between every pair of UAVs, which avoids collisions between them. The LCBF is time-varying and adapts to the motions of the UGVs. In the proposed CBF approach, the control input from the UAV's nominal tracking controller designed to reach the landing platform is filtered to choose a minimally-deviating control input that ensures safety (as defined by the CBFs). As the control inputs of every UAV are shared in establishing multiple CBF constraints, we prove that the control inputs are shared without conflict in rendering the safe sets forward invariant. The performance of the control framework is validated through a simulated scenario involving three UAVs landing on three moving targets.