 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloud-Assisted Remote Control for Aerial Robots: From Theory to Proof-of-Concept Implementation
Sep 04, 2025Cloud robotics has emerged as a promising technology for robotics applications due to its advantages of offloading computationally intensive tasks, facilitating data sharing, and enhancing robot coordination. However, integrating cloud computing with robotics remains a complex challenge due to network latency, security concerns, and the need for efficient resource management. In this work, we present a scalable and intuitive framework for testing cloud and edge robotic systems. The framework consists of two main components enabled by containerized technology: (a) a containerized cloud cluster and (b) the containerized robot simulation environment. The system incorporates two endpoints of a User Datagram Protocol (UDP) tunnel, enabling bidirectional communication between the cloud cluster container and the robot simulation environment, while simulating realistic network conditions. To achieve this, we consider the use case of cloud-assisted remote control for aerial robots, while utilizing Linux-based traffic control to introduce artificial delay and jitter, replicating variable network conditions encountered in practical cloud-robot deployments.
* 6 pages, 7 figures, CCGridW 2025
A Hierarchical Graph-Based Terrain-Aware Autonomous Navigation Approach for Complementary Multimodal Ground-Aerial Exploration
May 20, 2025Autonomous navigation in unknown environments is a fundamental challenge in robotics, particularly in coordinating ground and aerial robots to maximize exploration efficiency. This paper presents a novel approach that utilizes a hierarchical graph to represent the environment, encoding both geometric and semantic traversability. The framework enables the robots to compute a shared confidence metric, which helps the ground robot assess terrain and determine when deploying the aerial robot will extend exploration. The robot's confidence in traversing a path is based on factors such as predicted volumetric gain, path traversability, and collision risk. A hierarchy of graphs is used to maintain an efficient representation of traversability and frontier information through multi-resolution maps. Evaluated in a real subterranean exploration scenario, the approach allows the ground robot to autonomously identify zones that are no longer traversable but suitable for aerial deployment. By leveraging this hierarchical structure, the ground robot can selectively share graph information on confidence-assessed frontier targets from parts of the scene, enabling the aerial robot to navigate beyond obstacles and continue exploration.
Collision-free landing of multiple UAVs on moving ground vehicles using time-varying control barrier functions
Apr 08, 2025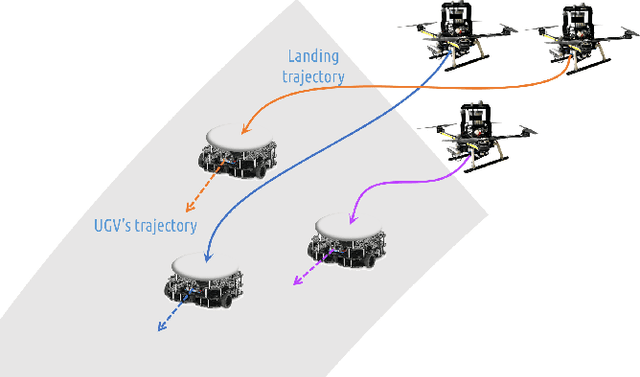
In this article, we present a centralized approach for the control of multiple unmanned aerial vehicles (UAVs) for landing on moving unmanned ground vehicles (UGVs) using control barrier functions (CBFs). The proposed control framework employs two kinds of CBFs to impose safety constraints on the UAVs' motion. The first class of CBFs (LCBF) is a three-dimensional exponentially decaying function centered above the landing platform, designed to safely and precisely land UAVs on the UGVs. The second set is a spherical CBF (SCBF), defined between every pair of UAVs, which avoids collisions between them. The LCBF is time-varying and adapts to the motions of the UGVs. In the proposed CBF approach, the control input from the UAV's nominal tracking controller designed to reach the landing platform is filtered to choose a minimally-deviating control input that ensures safety (as defined by the CBFs). As the control inputs of every UAV are shared in establishing multiple CBF constraints, we prove that the control inputs are shared without conflict in rendering the safe sets forward invariant. The performance of the control framework is validated through a simulated scenario involving three UAVs landing on three moving targets.
Barriers on the EDGE: A scalable CBF architecture over EDGE for safe aerial-ground multi-agent coordination
Nov 25, 2024In this article, we address the problem of designing a scalable control architecture for a safe coordinated operation of a multi-agent system with aerial (UAVs) and ground robots (UGVs) in a confined task space. The proposed method uses Control Barrier Functions (CBFs) to impose constraints associated with (i) collision avoidance between agents, (ii) landing of UAVs on mobile UGVs, and (iii) task space restriction. Further, to account for the rapid increase in the number of constraints for a single agent with the increasing number of agents, the proposed architecture uses a centralized-decentralized Edge cluster, where a centralized node (Watcher) activates the relevant constraints, reducing the need for high onboard processing and network complexity. The distributed nodes run the controller locally to overcome latency and network issues. The proposed Edge architecture is experimentally validated using multiple aerial and ground robots in a confined environment performing a coordinated operation.
Assisted Physical Interaction: Autonomous Aerial Robots with Neural Network Detection, Navigation, and Safety Layers
Oct 21, 2024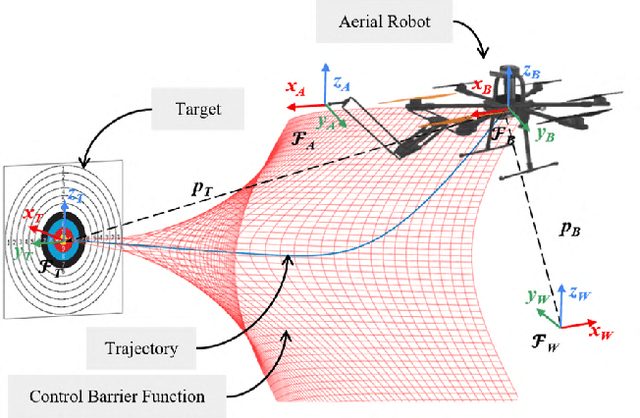


The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.
* 8 pages,14 figures, ICUAS 2024
A CBF-Adaptive Control Architecture for Visual Navigation for UAV in the Presence of Uncertainties
Feb 16, 2024In this article, we propose a control solution for the safe transfer of a quadrotor UAV between two surface robots positioning itself only using the visual features on the surface robots, which enforces safety constraints for precise landing and visual locking, in the presence of modeling uncertainties and external disturbances. The controller handles the ascending and descending phases of the navigation using a visual locking control barrier function (VCBF) and a parametrizable switching descending CBF (DCBF) respectively, eliminating the need for an external planner. The control scheme has a backstepping approach for the position controller with the CBF filter acting on the position kinematics to produce a filtered virtual velocity control input, which is tracked by an adaptive controller to overcome modeling uncertainties and external disturbances. The experimental validation is carried out with a UAV that navigates from the base to the target using an RGB camera.
Adaptive Control of Euler-Lagrange Systems under Time-varying State Constraints without a Priori Bounded Uncertainty
Oct 31, 2023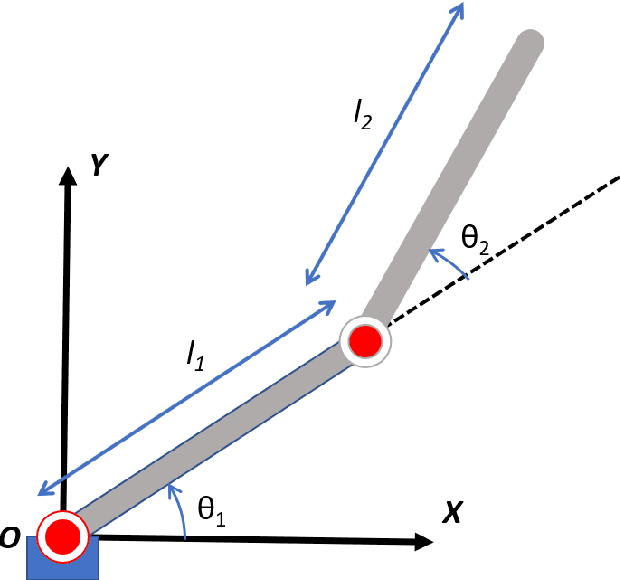
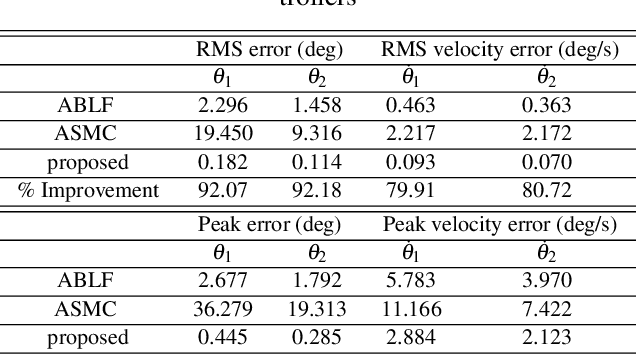
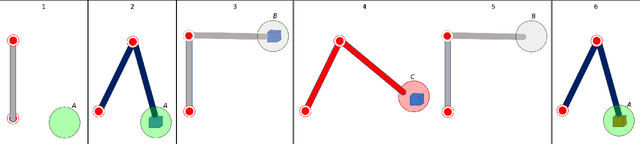
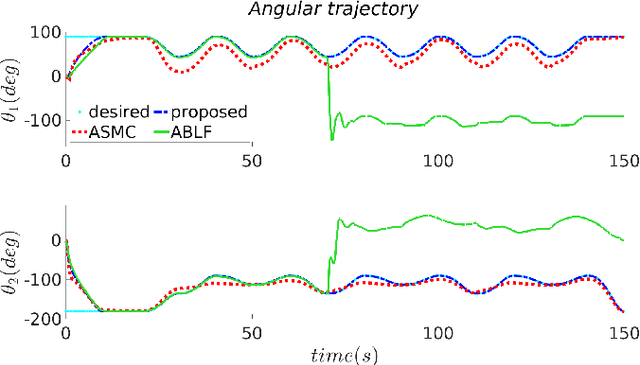
In this article, a novel adaptive controller is designed for Euler-Lagrangian systems under predefined time-varying state constraints. The proposed controller could achieve this objective without a priori knowledge of system parameters and, crucially, of state-dependent uncertainties. The closed-loop stability is verified using the Lyapunov method, while the overall efficacy of the proposed scheme is verified using a simulated robotic arm compared to the state of the art.
PACED-5G: Predictive Autonomous Control using Edge for Drones over 5G
Jan 30, 2023



With the advent of technologies such as Edge computing, the horizons of remote computational applications have broadened multidimensionally. Autonomous Unmanned Aerial Vehicle (UAV) mission is a vital application to utilize remote computation to catalyze its performance. However, offloading computational complexity to a remote system increases the latency in the system. Though technologies such as 5G networking minimize communication latency, the effects of latency on the control of UAVs are inevitable and may destabilize the system. Hence, it is essential to consider the delays in the system and compensate for them in the control design. Therefore, we propose a novel Edge-based predictive control architecture enabled by 5G networking, PACED-5G (Predictive Autonomous Control using Edge for Drones over 5G). In the proposed control architecture, we have designed a state estimator for estimating the current states based on the available knowledge of the time-varying delays, devised a Model Predictive controller (MPC) for the UAV to track the reference trajectory while avoiding obstacles, and provided an interface to offload the high-level tasks over Edge systems. The proposed architecture is validated in two experimental test cases using a quadrotor UAV.
Adaptive Controllers for Quadrotors Carrying Unknown Payloads
Aug 30, 2021

With the advent of intelligent transport, quadrotors are becoming an attractive solution while lifting or dropping payloads during emergency evacuations, construction works, etc. During such operations, dynamic variations in (possibly unknown) payload cause considerable changes in the system dynamics. However, a systematic control solution to tackle such varying dynamical behaviour is still missing. In this work, two control solutions are proposed to solve two specific problems in aerial transportation of payload, as mentioned below. In the first work, we explore the tracking control problem for a six degrees-of-freedom quadrotor carrying different unknown payloads. Due to the state-dependent nature of the uncertainties caused by variation in the dynamics, the state-of-the-art adaptive control solutions would be ineffective against these uncertainties that can be completely unknown and possibly unbounded a priori. In addition, external disturbances such as wind while following a trajectory in all three positions and attitude angles. Hence, an adaptive control solution for quadrotors is proposed, which does not require any a priori knowledge of the parameters of quadrotor dynamics and external disturbances. The second work is focused on the interchanging dynamic behaviour of a quadrotor while loading and unloading different payloads during vertical operations. The control problem to maintain the desired altitude is formulated via a switched dynamical framework to capture the interchanging dynamics of the quadrotor during such vertical operations, and a robust adaptive control solution is proposed to tackle such dynamics when it is unknown. The stability of the closed-loop system is studied analytically and the effectiveness of the proposed solution is verified via simulations.