 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAeroGrab: A Unified Framework for Aerial Grasping in Cluttered Environments
Mar 16, 2026Reliable aerial grasping in cluttered environments remains challenging due to occlusions and collision risks. Existing aerial manipulation pipelines largely rely on centroid-based grasping and lack integration between the grasp pose generation models, active exploration, and language-level task specification, resulting in the absence of a complete end-to-end system. In this work, we present an integrated pipeline for reliable aerial grasping in cluttered environments. Given a scene and a language instruction, the system identifies the target object and actively explores it to gain better views of the object. During exploration, a grasp generation network predicts multiple 6-DoF grasp candidates for each view. Each candidate is evaluated using a collision-aware feasibility framework, and the overall best grasp is selected and executed using standard trajectory generation and control methods. Experiments in cluttered real-world scenarios demonstrate robust and reliable grasp execution, highlighting the effectiveness of combining active perception with feasibility-aware grasp selection for aerial manipulation.
Learn Structure, Adapt on the Fly: Multi-Scale Residual Learning and Online Adaptation for Aerial Manipulators
Mar 12, 2026Autonomous Aerial Manipulators (AAMs) are inherently coupled, nonlinear systems that exhibit nonstationary and multiscale residual dynamics, particularly during manipulator reconfiguration and abrupt payload variations. Conventional analytical dynamic models rely on fixed parametric structures, while static data-driven model assume stationary dynamics and degrade under configuration changes and payload variations. Moreover, existing learning architectures do not explicitly factorize cross-variable coupling and multi-scale temporal effects, conflating instantaneous inertial dynamics with long-horizon regime evolution. We propose a predictive-adaptive framework for real-time residual modeling and compensation in AAMs. The core of this framework is the Factorized Dynamics Transformer (FDT), which treats physical variables as independent tokens. This design enables explicit cross-variable attention while structurally separating short-horizon inertial dependencies from long-horizon aerodynamic effects. To address deployment-time distribution shifts, a Latent Residual Adapter (LRA) performs rapid linear adaptation in the latent space via Recursive Least Squares, preserving the offline nonlinear representation without prohibitive computational overhead. The adapted residual forecast is directly integrated into a residual-compensated adaptive controller. Real-world experiments on an aerial manipulator subjected to unseen payloads demonstrate higher prediction fidelity, accelerated disturbance attenuation, and superior closed-loop tracking precision compared to state-of-the-art learning baselines, all while maintaining strict real-time feasibility.
AeroPlace-Flow: Language-Grounded Object Placement for Aerial Manipulators via Visual Foresight and Object Flow
Mar 08, 2026Precise object placement remains underexplored in aerial manipulation, where most systems rely on predefined target coordinates and focus primarily on grasping and control. Specifying exact placement poses, however, is cumbersome in real-world settings, where users naturally communicate goals through language. In this work, we present AeroPlace-Flow, a training-free framework for language-grounded aerial object placement that unifies visual foresight with explicit 3D geometric reasoning and object flow. Given RGB-D observations of the object and the placement scene, along with a natural language instruction, AeroPlace-Flow first synthesizes a task-complete goal image using image editing models. The imagined configuration is then grounded into metric 3D space through depth alignment and object-centric reasoning, enabling the inference of a collision-aware object flow that transports the grasped object to a language and contact-consistent placement configuration. The resulting motion is executed via standard trajectory tracking for an aerial manipulator. AeroPlace-Flow produces executable placement targets without requiring predefined poses or task-specific training. We validate our approach through extensive simulation and real-world experiments, demonstrating reliable language-conditioned placement across diverse aerial scenarios with an average success rate of 75% on hardware.
Bab_Sak Robotic Intubation System (BRIS): A Learning-Enabled Control Framework for Safe Fiberoptic Endotracheal Intubation
Dec 26, 2025Endotracheal intubation is a critical yet technically demanding procedure, with failure or improper tube placement leading to severe complications. Existing robotic and teleoperated intubation systems primarily focus on airway navigation and do not provide integrated control of endotracheal tube advancement or objective verification of tube depth relative to the carina. This paper presents the Robotic Intubation System (BRIS), a compact, human-in-the-loop platform designed to assist fiberoptic-guided intubation while enabling real-time, objective depth awareness. BRIS integrates a four-way steerable fiberoptic bronchoscope, an independent endotracheal tube advancement mechanism, and a camera-augmented mouthpiece compatible with standard clinical workflows. A learning-enabled closed-loop control framework leverages real-time shape sensing to map joystick inputs to distal bronchoscope tip motion in Cartesian space, providing stable and intuitive teleoperation under tendon nonlinearities and airway contact. Monocular endoscopic depth estimation is used to classify airway regions and provide interpretable, anatomy-aware guidance for safe tube positioning relative to the carina. The system is validated on high-fidelity airway mannequins under standard and difficult airway configurations, demonstrating reliable navigation and controlled tube placement. These results highlight BRIS as a step toward safer, more consistent, and clinically compatible robotic airway management.
AERMANI-Diffusion: Regime-Conditioned Diffusion for Dynamics Learning in Aerial Manipulators
Dec 11, 2025Aerial manipulators undergo rapid, configuration-dependent changes in inertial coupling forces and aerodynamic forces, making accurate dynamics modeling a core challenge for reliable control. Analytical models lose fidelity under these nonlinear and nonstationary effects, while standard data-driven methods such as deep neural networks and Gaussian processes cannot represent the diverse residual behaviors that arise across different operating conditions. We propose a regime-conditioned diffusion framework that models the full distribution of residual forces using a conditional diffusion process and a lightweight temporal encoder. The encoder extracts a compact summary of recent motion and configuration, enabling consistent residual predictions even through abrupt transitions or unseen payloads. When combined with an adaptive controller, the framework enables dynamics uncertainty compensation and yields markedly improved tracking accuracy in real-world tests.
Modular Adaptive Aerial Manipulation under Unknown Dynamic Coupling Forces
Oct 10, 2024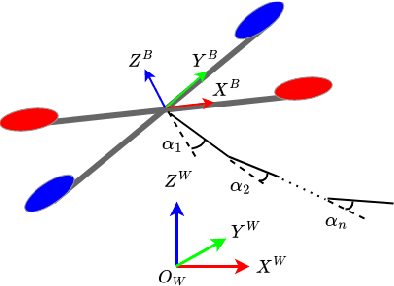
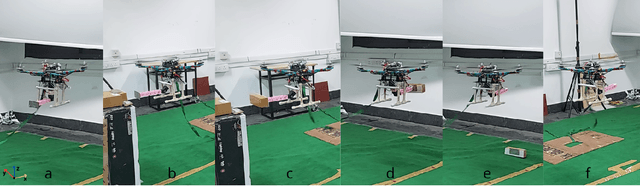
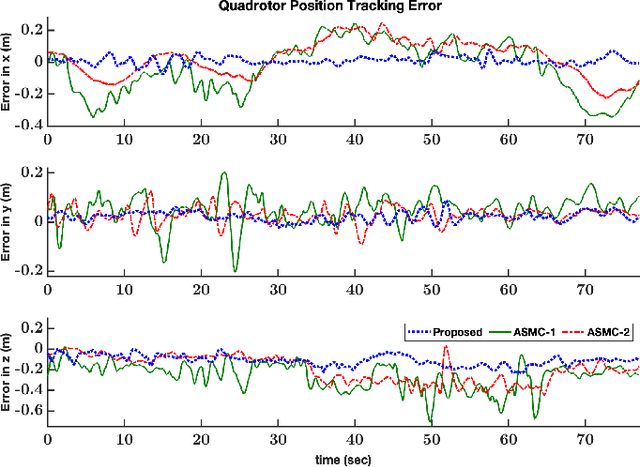
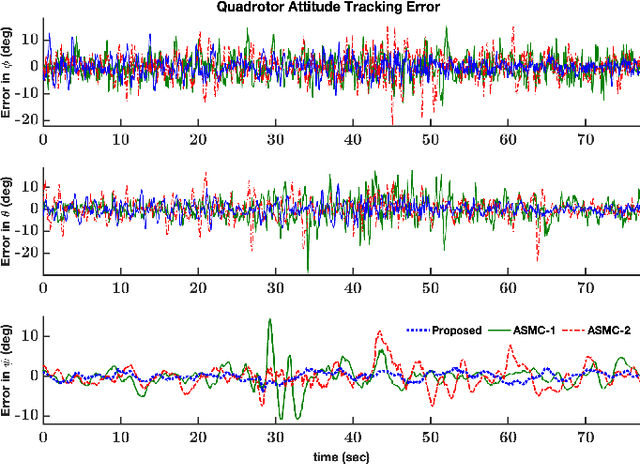
Successful aerial manipulation largely depends on how effectively a controller can tackle the coupling dynamic forces between the aerial vehicle and the manipulator. However, this control problem has remained largely unsolved as the existing control approaches either require precise knowledge of the aerial vehicle/manipulator inertial couplings, or neglect the state-dependent uncertainties especially arising during the interaction phase. This work proposes an adaptive control solution to overcome this long standing control challenge without any a priori knowledge of the coupling dynamic terms. Additionally, in contrast to the existing adaptive control solutions, the proposed control framework is modular, that is, it allows independent tuning of the adaptive gains for the vehicle position sub-dynamics, the vehicle attitude sub-dynamics, and the manipulator sub-dynamics. Stability of the closed loop under the proposed scheme is derived analytically, and real-time experiments validate the effectiveness of the proposed scheme over the state-of-the-art approaches.
An Integrated Approach to Aerial Grasping: Combining a Bistable Gripper with Adaptive Control
Nov 01, 2023Grasping using an aerial robot can have many applications ranging from infrastructure inspection and maintenance to precise agriculture. However, aerial grasping is a challenging problem since the robot has to maintain an accurate position and orientation relative to the grasping object, while negotiating various forms of uncertainties (e.g., contact force from the object). To address such challenges, in this paper, we integrate a novel passive gripper design and advanced adaptive control methods to enable robust aerial grasping. The gripper is enabled by a pre-stressed band with two stable states (a flat shape and a curled shape). In this case, it can automatically initiate the grasping process upon contact with an object. The gripper also features a cable-driven system by a single DC motor to open the gripper without using cumbersome pneumatics. Since the gripper is passively triggered and initially has a straight shape, it can function without precisely aligning the gripper with the object (within an $80$ mm tolerance). Our adaptive control scheme eliminates the need for any a priori knowledge (nominal or upper bounds) of uncertainties. The closed-loop stability of the system is analyzed via Lyapunov-based method. Combining the gripper and the adaptive control, we conduct comparative real-time experimental results to demonstrate the effectiveness of the proposed integrated system for grasping. Our integrated approach can pave the way to enhance aerial grasping for different applications.
Adaptive Control of Euler-Lagrange Systems under Time-varying State Constraints without a Priori Bounded Uncertainty
Oct 31, 2023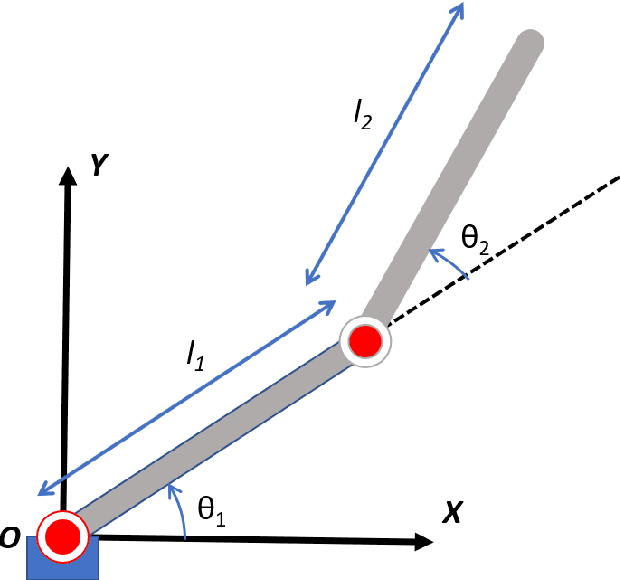
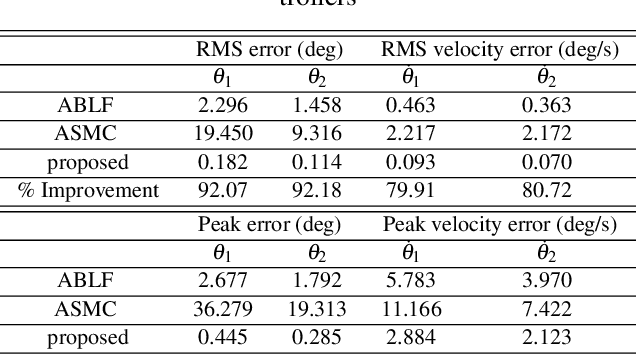
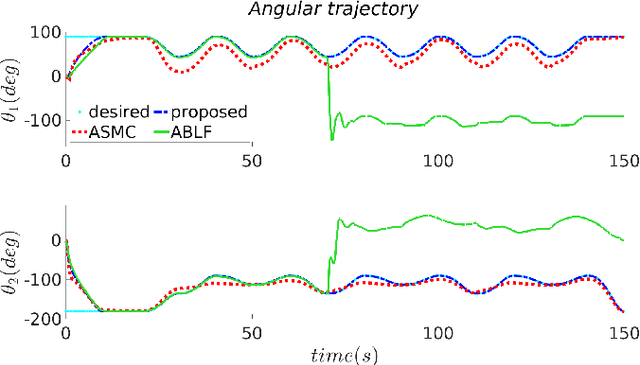
In this article, a novel adaptive controller is designed for Euler-Lagrangian systems under predefined time-varying state constraints. The proposed controller could achieve this objective without a priori knowledge of system parameters and, crucially, of state-dependent uncertainties. The closed-loop stability is verified using the Lyapunov method, while the overall efficacy of the proposed scheme is verified using a simulated robotic arm compared to the state of the art.