 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Artificial Time-Delay Control with Barrier Lyapunov Constraints for Euler-Lagrange Robots
May 29, 2026This paper addresses the challenge of simultaneously compensating for state-dependent uncertainties and enforcing time-varying state constraints in Euler-Lagrange systems, a common requirement in robotics that remains underserved by existing control designs. A novel adaptive control framework is developed that combines an artificial time-delay-based uncertainty estimation strategy, also known as time-delay estimation, with a barrier Lyapunov function to enforce constraint-aware control design. Specifically, a state-dependent upper bound on the time-delay estimation approximation error is analytically formulated, and an adaptive law is constructed to estimate its parameters online, enabling real-time state-dependent uncertainty compensation without relying on prior model knowledge. To ensure constraint compliance, the barrier Lyapunov function-based controller enforces time-varying bounds on both position and velocity. The resulting architecture is provably stable via Lyapunov analysis. Experimental results on a five-degree-of-freedom robotic manipulator validate the framework's capability, compared with the state of the art, in maintaining strict adherence to safety-critical constraints under dynamic uncertainties.
Bab_Sak Robotic Intubation System (BRIS): A Learning-Enabled Control Framework for Safe Fiberoptic Endotracheal Intubation
Dec 26, 2025Endotracheal intubation is a critical yet technically demanding procedure, with failure or improper tube placement leading to severe complications. Existing robotic and teleoperated intubation systems primarily focus on airway navigation and do not provide integrated control of endotracheal tube advancement or objective verification of tube depth relative to the carina. This paper presents the Robotic Intubation System (BRIS), a compact, human-in-the-loop platform designed to assist fiberoptic-guided intubation while enabling real-time, objective depth awareness. BRIS integrates a four-way steerable fiberoptic bronchoscope, an independent endotracheal tube advancement mechanism, and a camera-augmented mouthpiece compatible with standard clinical workflows. A learning-enabled closed-loop control framework leverages real-time shape sensing to map joystick inputs to distal bronchoscope tip motion in Cartesian space, providing stable and intuitive teleoperation under tendon nonlinearities and airway contact. Monocular endoscopic depth estimation is used to classify airway regions and provide interpretable, anatomy-aware guidance for safe tube positioning relative to the carina. The system is validated on high-fidelity airway mannequins under standard and difficult airway configurations, demonstrating reliable navigation and controlled tube placement. These results highlight BRIS as a step toward safer, more consistent, and clinically compatible robotic airway management.
Graph Residual based Method for Molecular Property Prediction
Jul 27, 2024Property prediction of materials has recently been of high interest in the recent years in the field of material science. Various Physics-based and Machine Learning models have already been developed, that can give good results. However, they are not accurate enough and are inadequate for critical applications. The traditional machine learning models try to predict properties based on the features extracted from the molecules, which are not easily available most of the time. In this paper, a recently developed novel Deep Learning method, the Graph Neural Network (GNN), has been applied, allowing us to predict properties directly only the Graph-based structures of the molecules. SMILES (Simplified Molecular Input Line Entry System) representation of the molecules has been used in the present study as input data format, which has been further converted into a graph database, which constitutes the training data. This article highlights the detailed description of the novel GRU-based methodology to map the inputs that have been used. Emphasis on highlighting both the regressive property as well as the classification-based property of the GNN backbone. A detailed description of the Variational Autoencoder (VAE) and the end-to-end learning method has been given to highlight the multi-class multi-label property prediction of the backbone. The results have been compared with standard benchmark datasets as well as some newly developed datasets. All performance metrics which have been used have been clearly defined as well as their reason for choice. Keywords: GNN, VAE, SMILES, multi-label multi-class classification, GRU
An Integrated Approach to Aerial Grasping: Combining a Bistable Gripper with Adaptive Control
Nov 01, 2023Grasping using an aerial robot can have many applications ranging from infrastructure inspection and maintenance to precise agriculture. However, aerial grasping is a challenging problem since the robot has to maintain an accurate position and orientation relative to the grasping object, while negotiating various forms of uncertainties (e.g., contact force from the object). To address such challenges, in this paper, we integrate a novel passive gripper design and advanced adaptive control methods to enable robust aerial grasping. The gripper is enabled by a pre-stressed band with two stable states (a flat shape and a curled shape). In this case, it can automatically initiate the grasping process upon contact with an object. The gripper also features a cable-driven system by a single DC motor to open the gripper without using cumbersome pneumatics. Since the gripper is passively triggered and initially has a straight shape, it can function without precisely aligning the gripper with the object (within an $80$ mm tolerance). Our adaptive control scheme eliminates the need for any a priori knowledge (nominal or upper bounds) of uncertainties. The closed-loop stability of the system is analyzed via Lyapunov-based method. Combining the gripper and the adaptive control, we conduct comparative real-time experimental results to demonstrate the effectiveness of the proposed integrated system for grasping. Our integrated approach can pave the way to enhance aerial grasping for different applications.
Effective Gesture Based Framework for Capturing User Input
Aug 01, 2022



Computers today aren't just confined to laptops and desktops. Mobile gadgets like mobile phones and laptops also make use of it. However, one input device that hasn't changed in the last 50 years is the QWERTY keyboard. Users of virtual keyboards can type on any surface as if it were a keyboard thanks to sensor technology and artificial intelligence. In this research, we use the idea of image processing to create an application for seeing a computer keyboard using a novel framework which can detect hand gestures with precise accuracy while also being sustainable and financially viable. A camera is used to capture keyboard images and finger movements which subsequently acts as a virtual keyboard. In addition, a visible virtual mouse that accepts finger coordinates as input is also described in this study. This system has a direct benefit of reducing peripheral cost, reducing electronics waste generated due to external devices and providing accessibility to people who cannot use the traditional keyboard and mouse.
Crack-pot: Autonomous Road Crack and Pothole Detection
Sep 09, 2018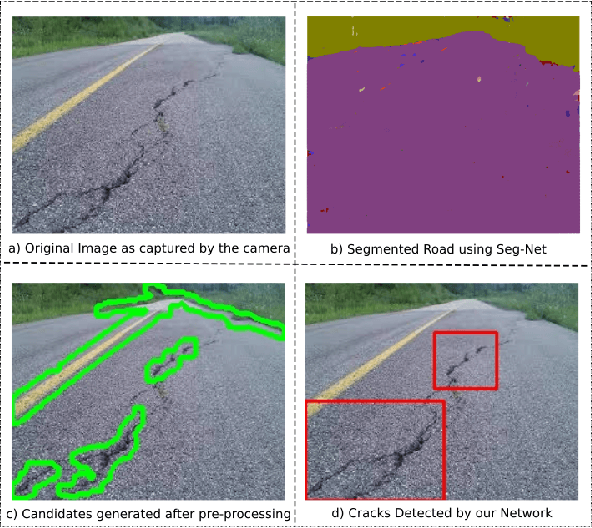
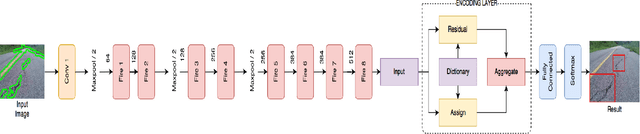
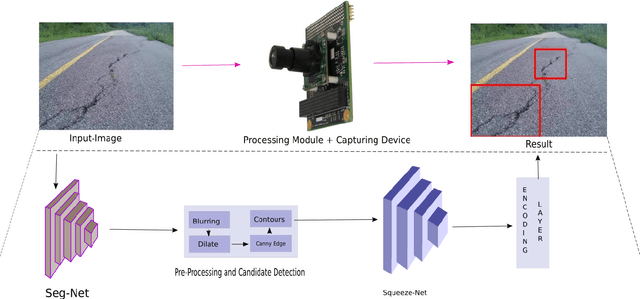
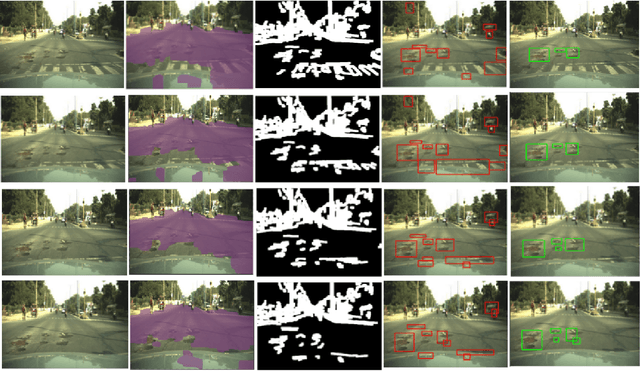
With the advent of self-driving cars and autonomous robots, it is imperative to detect road impairments like cracks and potholes and to perform necessary evading maneuvers to ensure fluid journey for on-board passengers or equipment. We propose a fully autonomous robust real-time road crack and pothole detection algorithm which can be deployed on any GPU based conventional processing boards with an associated camera. The approach is based on a deep neural net architecture which detects cracks and potholes using texture and spatial features. We also propose pre-processing methods which ensure real-time performance. The novelty of the approach lies in using texture- based features to differentiate between crack surfaces and sound roads. The approach performs well in large viewpoint changes, background noise, shadows, and occlusion. The efficacy of the system is shown on standard road crack datasets.
Fingerprint Extraction Using Smartphone Camera
Aug 02, 2017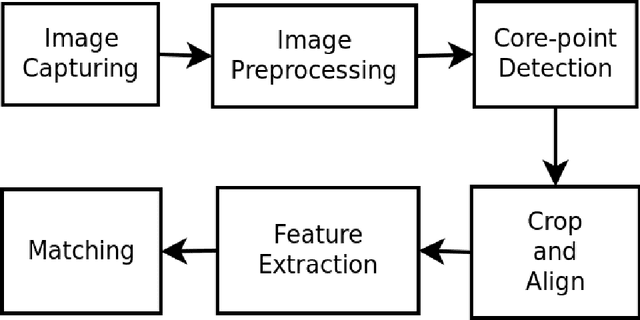
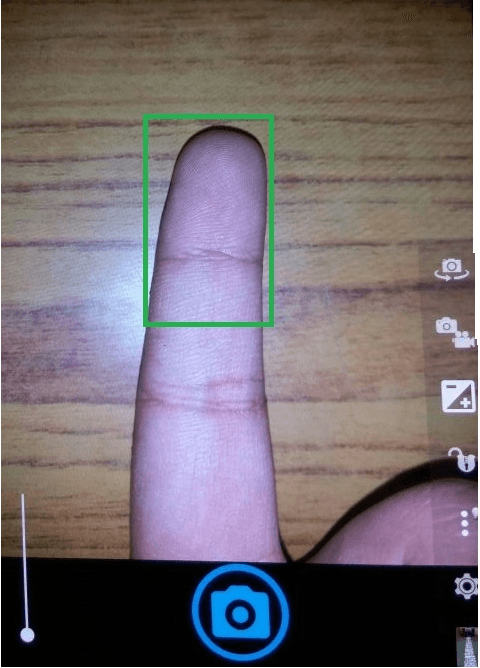
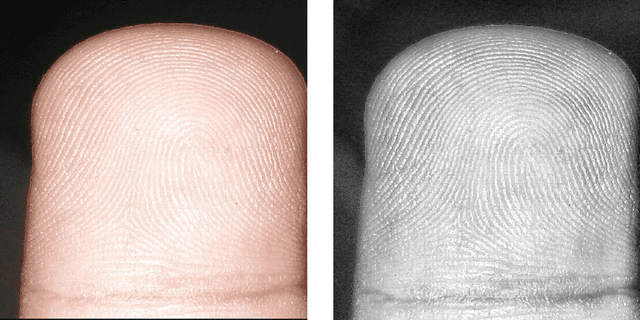
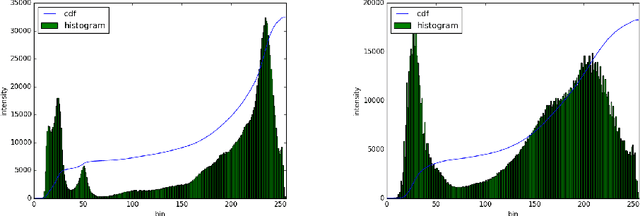
In the previous decade, there has been a considerable rise in the usage of smartphones.Due to exorbitant advancement in technology, computational speed and quality of image capturing has increased considerably. With an increase in the need for remote fingerprint verification, smartphones can be used as a powerful alternative for fingerprint authentication instead of conventional optical sensors. In this research, wepropose a technique to capture finger-images from the smartphones and pre-process them in such a way that it can be easily matched with the optical sensor images.Effective finger-image capturing, image enhancement, fingerprint pattern extraction, core point detection and image alignment techniques have been discussed. The proposed approach has been validated on FVC 2004 DB1 & DB2 dataset and the results show the efficacy of the methodology proposed. The method can be deployed for real-time commercial usage.
Dynamic Motion Planning for Aerial Surveillance on a Fixed-Wing UAV
May 22, 2017

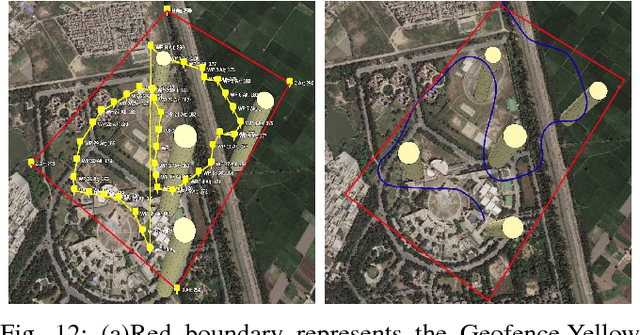
We present an efficient path planning algorithm for an Unmanned Aerial Vehicle surveying a cluttered urban landscape. A special emphasis is on maximizing area surveyed while adhering to constraints of the UAV and partially known and updating environment. A Voronoi bias is introduced in the probabilistic roadmap building phase to identify certain critical milestones for maximal surveillance of the search space. A kinematically feasible but coarse tour connecting these milestones is generated by the global path planner. A local path planner then generates smooth motion primitives between consecutive nodes of the global path based on UAV as a Dubins vehicle and taking into account any impending obstacles. A Markov Decision Process (MDP) models the control policy for the UAV and determines the optimal action to be undertaken for evading the obstacles in the vicinity with minimal deviation from current path. The efficacy of the proposed algorithm is evaluated in an updating simulation environment with dynamic and static obstacles.