 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrack-pot: Autonomous Road Crack and Pothole Detection
Sep 09, 2018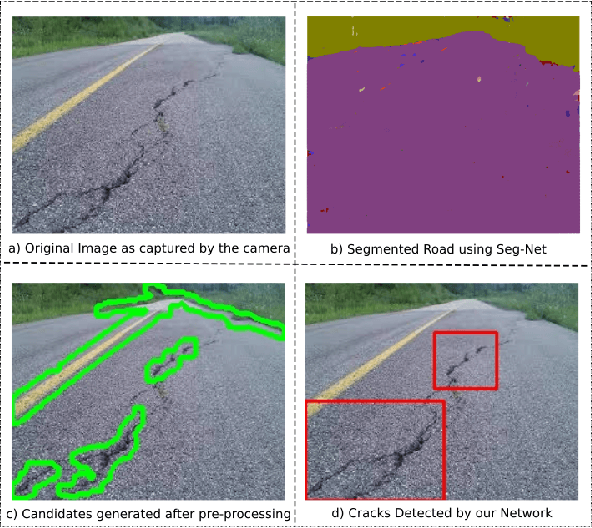
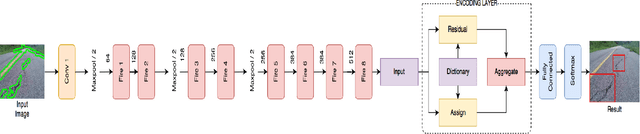
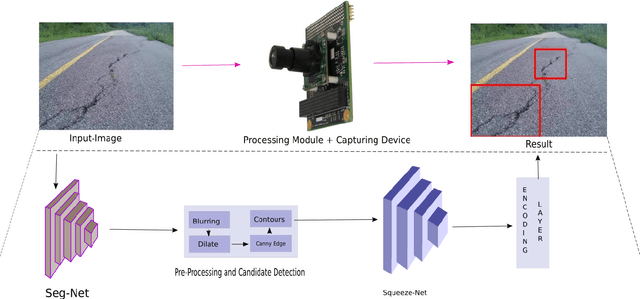
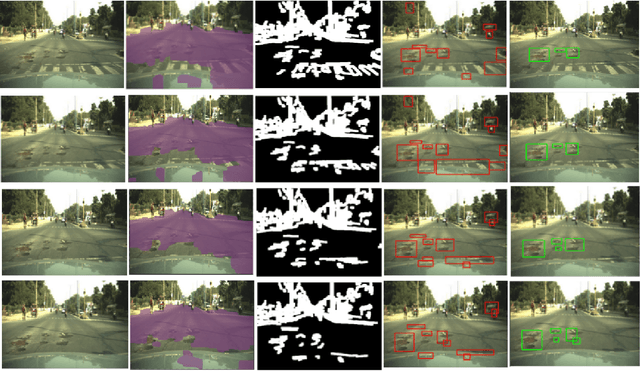
With the advent of self-driving cars and autonomous robots, it is imperative to detect road impairments like cracks and potholes and to perform necessary evading maneuvers to ensure fluid journey for on-board passengers or equipment. We propose a fully autonomous robust real-time road crack and pothole detection algorithm which can be deployed on any GPU based conventional processing boards with an associated camera. The approach is based on a deep neural net architecture which detects cracks and potholes using texture and spatial features. We also propose pre-processing methods which ensure real-time performance. The novelty of the approach lies in using texture- based features to differentiate between crack surfaces and sound roads. The approach performs well in large viewpoint changes, background noise, shadows, and occlusion. The efficacy of the system is shown on standard road crack datasets.
Dynamic Motion Planning for Aerial Surveillance on a Fixed-Wing UAV
May 22, 2017

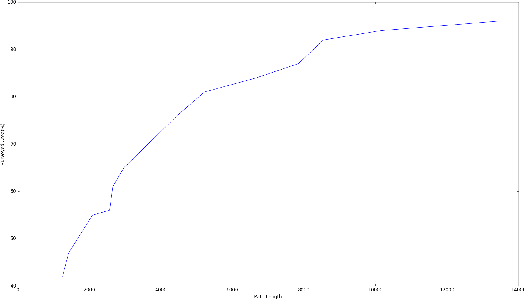
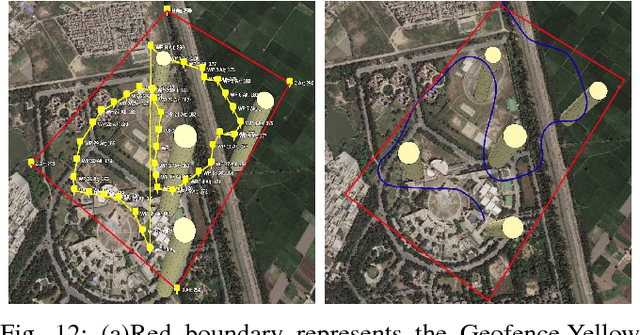
We present an efficient path planning algorithm for an Unmanned Aerial Vehicle surveying a cluttered urban landscape. A special emphasis is on maximizing area surveyed while adhering to constraints of the UAV and partially known and updating environment. A Voronoi bias is introduced in the probabilistic roadmap building phase to identify certain critical milestones for maximal surveillance of the search space. A kinematically feasible but coarse tour connecting these milestones is generated by the global path planner. A local path planner then generates smooth motion primitives between consecutive nodes of the global path based on UAV as a Dubins vehicle and taking into account any impending obstacles. A Markov Decision Process (MDP) models the control policy for the UAV and determines the optimal action to be undertaken for evading the obstacles in the vicinity with minimal deviation from current path. The efficacy of the proposed algorithm is evaluated in an updating simulation environment with dynamic and static obstacles.