 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAERMANI-PLACE: Language Guided Object Placement with Aerial Manipulators
Jun 12, 2026Object placement is a fundamental component of aerial manipulation tasks, yet existing systems typically require the desired placement position to be specified explicitly in metric coordinates. Such interfaces are not intuitive and require users to reason about coordinate frames and scene geometry, making them difficult to use in practical deployments. In contrast, humans often communicate spatial goals through a combination of language and pointing gestures. Inspired by this observation, we present AERMANI-PLACE, a framework for language-guided object placement with aerial manipulators. Given a scene image and a natural language instruction, an image editing model generates a modified version of the scene containing a visual marker that indicates where the object should be placed. This marker is then grounded into the physical environment using depth observations to recover a metric place point, after which a placement trajectory is generated and executed by the aerial manipulator. We evaluate the proposed approach on a test set of 100 language-guided placement tasks and demonstrate successful execution on a real aerial manipulation platform. Experimental results show that the proposed method reliably infers placement locations from language instructions with an average success rate of 87\% on the test-set and transfers effectively to real-world aerial manipulation with an average success rate of 72\%. Video: https://youtu.be/SgwwgLBsv0g
Physics-Aware Sparse Learning and Selective Online Adaptation for Euler-Lagrange Robot Dynamics
Jun 08, 2026Accurate dynamics models are essential for model-based robotic control, yet nominal Euler--Lagrange models often become inaccurate in the presence of payload variation, unmodeled coupling, friction, aerodynamic effects, and changing operating conditions. Most learning-based correction methods improve prediction accuracy by introducing a single additive residual, but do not preserve the internal mechanical structure of Euler--Lagrange systems. This leads to models that do not preserve symmetry, positive-definiteness, or the coupling between inertia and velocity-dependent terms, which can result in physically inconsistent predictions and reduced reliability when embedded in model-based controllers. We propose a structure-preserving residual learning framework that decomposes model mismatch into an inertia correction, the corresponding induced Coriolis term, and a generalized-force residual. The mechanical component is learned under physical constraints, while the disturbance-sensitive component is represented through a sparse history-dependent latent interaction model and adapted online using Bayesian linear regression. This separation preserves key mechanical structure while restricting adaptation to the part of the dynamics most affected by changing conditions. Experiments across multiple robotic platforms, including mobile, aerial, and manipulator systems, show that the proposed method improves dynamics prediction and trajectory tracking under coupled and time-varying dynamics. These results highlight the value of combining structured residual modeling, compact latent interaction selection, and selective online adaptation for real-world model-based control.
Adaptive Artificial Time-Delay Control with Barrier Lyapunov Constraints for Euler-Lagrange Robots
May 29, 2026This paper addresses the challenge of simultaneously compensating for state-dependent uncertainties and enforcing time-varying state constraints in Euler-Lagrange systems, a common requirement in robotics that remains underserved by existing control designs. A novel adaptive control framework is developed that combines an artificial time-delay-based uncertainty estimation strategy, also known as time-delay estimation, with a barrier Lyapunov function to enforce constraint-aware control design. Specifically, a state-dependent upper bound on the time-delay estimation approximation error is analytically formulated, and an adaptive law is constructed to estimate its parameters online, enabling real-time state-dependent uncertainty compensation without relying on prior model knowledge. To ensure constraint compliance, the barrier Lyapunov function-based controller enforces time-varying bounds on both position and velocity. The resulting architecture is provably stable via Lyapunov analysis. Experimental results on a five-degree-of-freedom robotic manipulator validate the framework's capability, compared with the state of the art, in maintaining strict adherence to safety-critical constraints under dynamic uncertainties.
Learning Cross-Coupled and Regime Dependent Dynamics for Aerial Manipulation
May 14, 2026Accurate dynamics models are critical for aerial manipulators operating under complex tasks such as payload transport. However, modeling these systems remains fundamentally challenging due to strong quadrotor-manipulator coupling, delayed aerodynamic interactions, and regime-dependent dynamics variations arising from payload changes and manipulator reconfiguration. These effects produce residual dynamics that are simultaneously cross-coupled, history-dependent, and nonstationary, causing both analytical models and purely offline learned models to degrade during deployment. To address these challenges, we propose a structured encoder-decoder framework for adaptive residual dynamics learning in aerial manipulators. The proposed nonlinear latent encoder captures cross-variable coupling and temporal dependencies from state-input histories, while a lightweight linear latent decoder enables online adaptation under regime-dependent nonstationary dynamics. The linear-in-parameter decoder structure permits closed-form Bayesian adaptation together with consistency-driven covariance inflation, enabling rapid and stable adaptation to both transient and slowly varying dynamics changes while remaining compatible with real-time model predictive control (MPC). Experimental results on a real aerial manipulation platform demonstrate improved residual prediction accuracy, faster adaptation under changing operating conditions, and enhanced MPC-based trajectory tracking performance. These results highlight the importance of jointly modeling coupled temporal dynamics and deployment-time nonstationarity for reliable aerial manipulation.
AeroGrab: A Unified Framework for Aerial Grasping in Cluttered Environments
Mar 16, 2026Reliable aerial grasping in cluttered environments remains challenging due to occlusions and collision risks. Existing aerial manipulation pipelines largely rely on centroid-based grasping and lack integration between the grasp pose generation models, active exploration, and language-level task specification, resulting in the absence of a complete end-to-end system. In this work, we present an integrated pipeline for reliable aerial grasping in cluttered environments. Given a scene and a language instruction, the system identifies the target object and actively explores it to gain better views of the object. During exploration, a grasp generation network predicts multiple 6-DoF grasp candidates for each view. Each candidate is evaluated using a collision-aware feasibility framework, and the overall best grasp is selected and executed using standard trajectory generation and control methods. Experiments in cluttered real-world scenarios demonstrate robust and reliable grasp execution, highlighting the effectiveness of combining active perception with feasibility-aware grasp selection for aerial manipulation.
Learn Structure, Adapt on the Fly: Multi-Scale Residual Learning and Online Adaptation for Aerial Manipulators
Mar 12, 2026Autonomous Aerial Manipulators (AAMs) are inherently coupled, nonlinear systems that exhibit nonstationary and multiscale residual dynamics, particularly during manipulator reconfiguration and abrupt payload variations. Conventional analytical dynamic models rely on fixed parametric structures, while static data-driven model assume stationary dynamics and degrade under configuration changes and payload variations. Moreover, existing learning architectures do not explicitly factorize cross-variable coupling and multi-scale temporal effects, conflating instantaneous inertial dynamics with long-horizon regime evolution. We propose a predictive-adaptive framework for real-time residual modeling and compensation in AAMs. The core of this framework is the Factorized Dynamics Transformer (FDT), which treats physical variables as independent tokens. This design enables explicit cross-variable attention while structurally separating short-horizon inertial dependencies from long-horizon aerodynamic effects. To address deployment-time distribution shifts, a Latent Residual Adapter (LRA) performs rapid linear adaptation in the latent space via Recursive Least Squares, preserving the offline nonlinear representation without prohibitive computational overhead. The adapted residual forecast is directly integrated into a residual-compensated adaptive controller. Real-world experiments on an aerial manipulator subjected to unseen payloads demonstrate higher prediction fidelity, accelerated disturbance attenuation, and superior closed-loop tracking precision compared to state-of-the-art learning baselines, all while maintaining strict real-time feasibility.
AeroPlace-Flow: Language-Grounded Object Placement for Aerial Manipulators via Visual Foresight and Object Flow
Mar 08, 2026Precise object placement remains underexplored in aerial manipulation, where most systems rely on predefined target coordinates and focus primarily on grasping and control. Specifying exact placement poses, however, is cumbersome in real-world settings, where users naturally communicate goals through language. In this work, we present AeroPlace-Flow, a training-free framework for language-grounded aerial object placement that unifies visual foresight with explicit 3D geometric reasoning and object flow. Given RGB-D observations of the object and the placement scene, along with a natural language instruction, AeroPlace-Flow first synthesizes a task-complete goal image using image editing models. The imagined configuration is then grounded into metric 3D space through depth alignment and object-centric reasoning, enabling the inference of a collision-aware object flow that transports the grasped object to a language and contact-consistent placement configuration. The resulting motion is executed via standard trajectory tracking for an aerial manipulator. AeroPlace-Flow produces executable placement targets without requiring predefined poses or task-specific training. We validate our approach through extensive simulation and real-world experiments, demonstrating reliable language-conditioned placement across diverse aerial scenarios with an average success rate of 75% on hardware.
Maintaining the Level of a Payload carried by Multi-Robot System on Irregular Surface
Dec 19, 2025
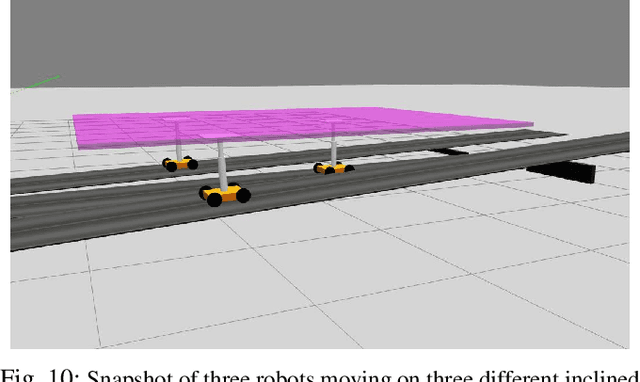


In this paper, we introduce a multi robot payload transport system to carry payloads through an environment of unknown and uneven inclinations while maintaining the desired orientation of the payload. For this task, we used custom built robots with a linear actuator (pistons) mounted on top of each robot. The system continuously monitors the payload's orientation and computes the required piston height of each robot to maintain the desired orientation of the payload. In this work, we propose an open loop controller coupled with a closed loop PID controller to achieve the goal. As our modelling makes no assumptions on the type of terrain, the system can work on any unknown and uneven terrains and inclinations. We showcase the efficacy of our proposed controller by testing it on various simulated environments with varied and complex terrains.
ARCADE: Adaptive Robot Control with Online Changepoint-Aware Bayesian Dynamics Learning
Dec 16, 2025
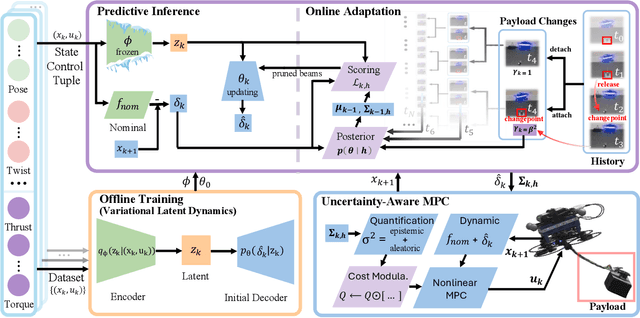
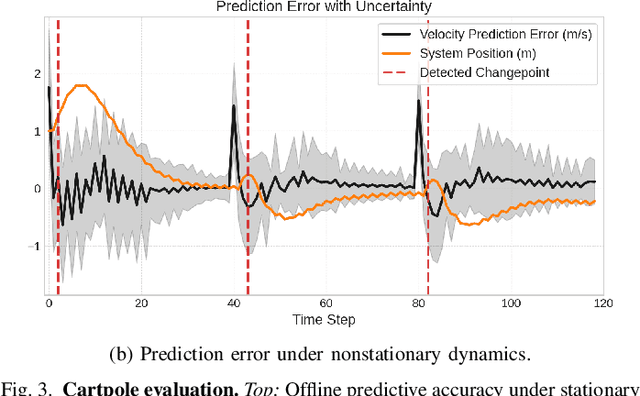
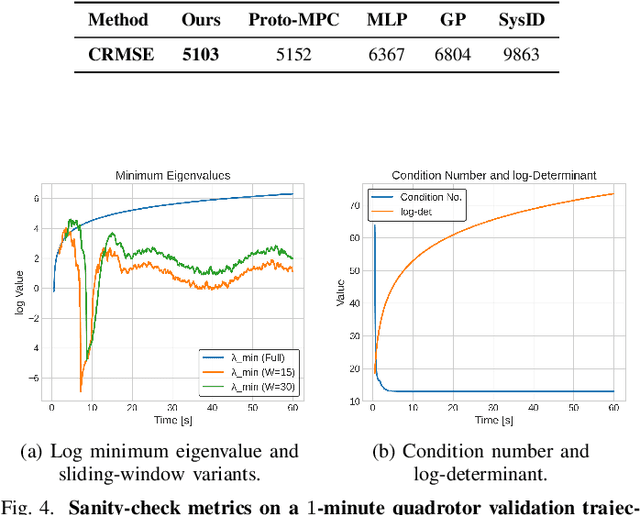
Real-world robots must operate under evolving dynamics caused by changing operating conditions, external disturbances, and unmodeled effects. These may appear as gradual drifts, transient fluctuations, or abrupt shifts, demanding real-time adaptation that is robust to short-term variation yet responsive to lasting change. We propose a framework for modeling the nonlinear dynamics of robotic systems that can be updated in real time from streaming data. The method decouples representation learning from online adaptation, using latent representations learned offline to support online closed-form Bayesian updates. To handle evolving conditions, we introduce a changepoint-aware mechanism with a latent variable inferred from data likelihoods that indicates continuity or shift. When continuity is likely, evidence accumulates to refine predictions; when a shift is detected, past information is tempered to enable rapid re-learning. This maintains calibrated uncertainty and supports probabilistic reasoning about transient, gradual, or structural change. We prove that the adaptive regret of the framework grows only logarithmically in time and linearly with the number of shifts, competitive with an oracle that knows timings of shift. We validate on cartpole simulations and real quadrotor flights with swinging payloads and mid-flight drops, showing improved predictive accuracy, faster recovery, and more accurate closed-loop tracking than relevant baselines.
AERMANI-Diffusion: Regime-Conditioned Diffusion for Dynamics Learning in Aerial Manipulators
Dec 11, 2025Aerial manipulators undergo rapid, configuration-dependent changes in inertial coupling forces and aerodynamic forces, making accurate dynamics modeling a core challenge for reliable control. Analytical models lose fidelity under these nonlinear and nonstationary effects, while standard data-driven methods such as deep neural networks and Gaussian processes cannot represent the diverse residual behaviors that arise across different operating conditions. We propose a regime-conditioned diffusion framework that models the full distribution of residual forces using a conditional diffusion process and a lightweight temporal encoder. The encoder extracts a compact summary of recent motion and configuration, enabling consistent residual predictions even through abrupt transitions or unseen payloads. When combined with an adaptive controller, the framework enables dynamics uncertainty compensation and yields markedly improved tracking accuracy in real-world tests.