 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion
Sep 17, 2025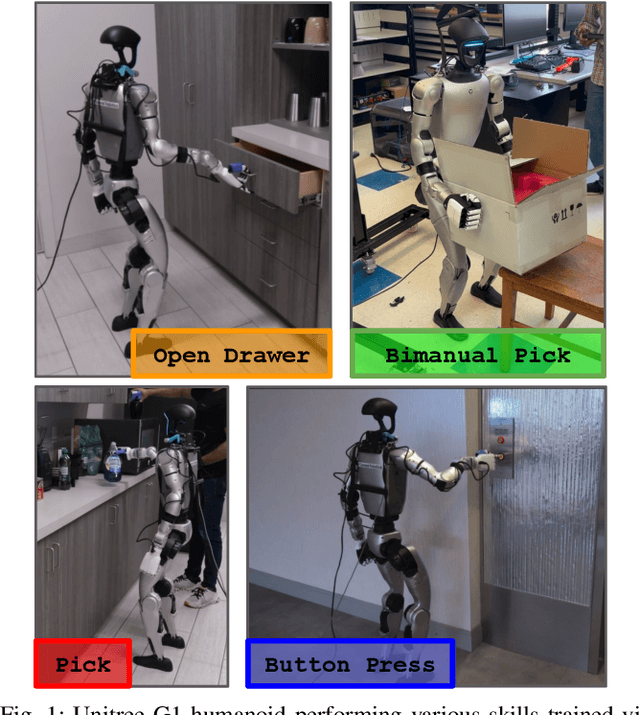
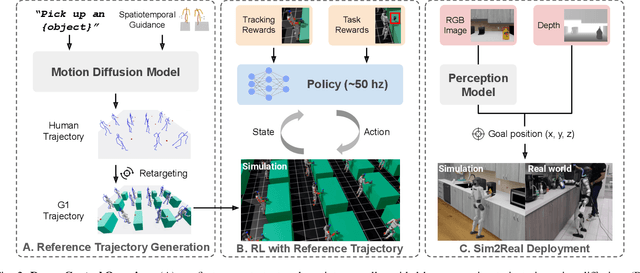
We introduce DreamControl, a novel methodology for learning autonomous whole-body humanoid skills. DreamControl leverages the strengths of diffusion models and Reinforcement Learning (RL): our core innovation is the use of a diffusion prior trained on human motion data, which subsequently guides an RL policy in simulation to complete specific tasks of interest (e.g., opening a drawer or picking up an object). We demonstrate that this human motion-informed prior allows RL to discover solutions unattainable by direct RL, and that diffusion models inherently promote natural looking motions, aiding in sim-to-real transfer. We validate DreamControl's effectiveness on a Unitree G1 robot across a diverse set of challenging tasks involving simultaneous lower and upper body control and object interaction.
FinderNet: A Data Augmentation Free Canonicalization aided Loop Detection and Closure technique for Point clouds in 6-DOF separation
Apr 03, 2023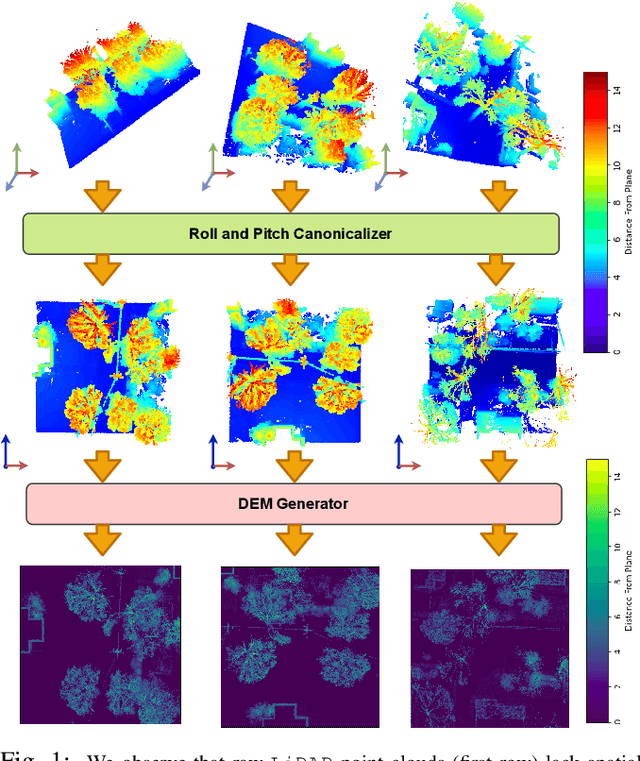
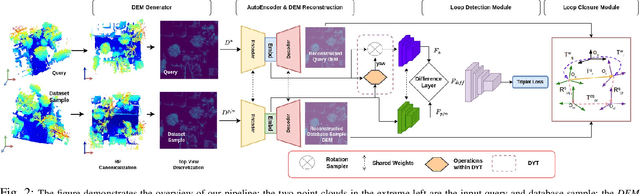
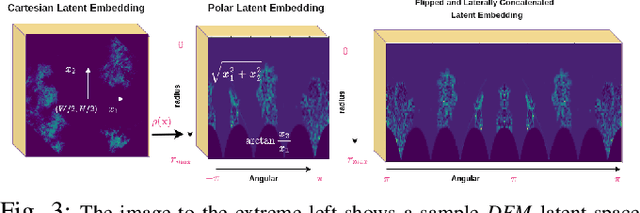
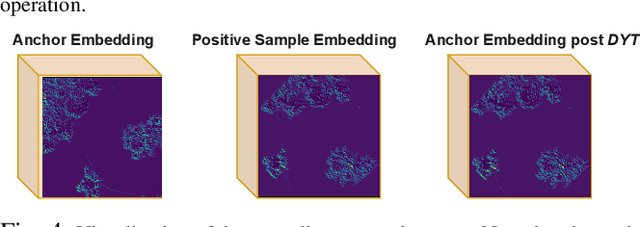
We focus on the problem of LiDAR point cloud based loop detection (or Finding) and closure (LDC) in a multi-agent setting. State-of-the-art (SOTA) techniques directly generate learned embeddings of a given point cloud, require large data transfers, and are not robust to wide variations in 6 Degrees-of-Freedom (DOF) viewpoint. Moreover, absence of strong priors in an unstructured point cloud leads to highly inaccurate LDC. In this original approach, we propose independent roll and pitch canonicalization of the point clouds using a common dominant ground plane. Discretization of the canonicalized point cloud along the axis perpendicular to the ground plane leads to an image similar to Digital Elevation Maps (DEMs), which exposes strong spatial priors in the scene. Our experiments show that LDC based on learnt embeddings of such DEMs is not only data efficient but also significantly more robust, and generalizable than the current SOTA. We report significant performance gain in terms of Average Precision for loop detection and absolute translation/rotation error for relative pose estimation (or loop closure) on Kitti, GPR and Oxford Robot Car over multiple SOTA LDC methods. Our encoder technique allows to compress the original point cloud by over 830 times. To further test the robustness of our technique we create and opensource a custom dataset called Lidar-UrbanFly Dataset (LUF) which consists of point clouds obtained from a LiDAR mounted on a quadrotor.
UrbanFly: Uncertainty-Aware Planning for Navigation Amongst High-Rises with Monocular Visual-Inertial SLAM Maps
Apr 02, 2022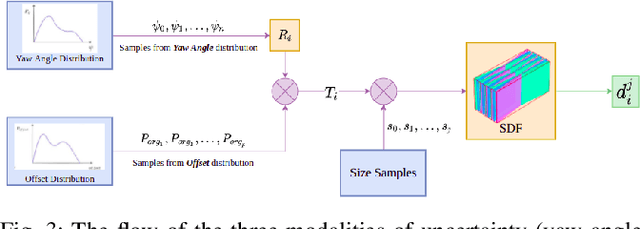
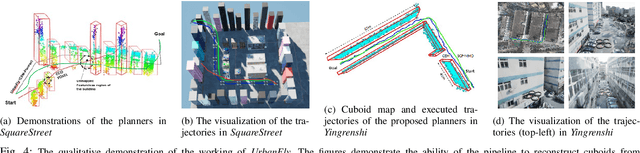
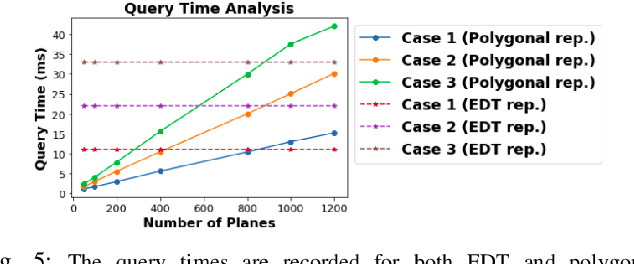
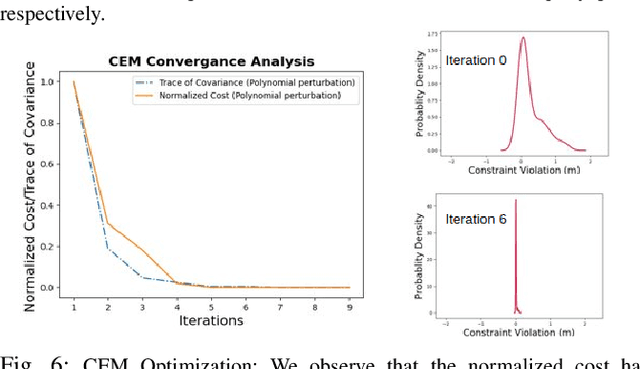
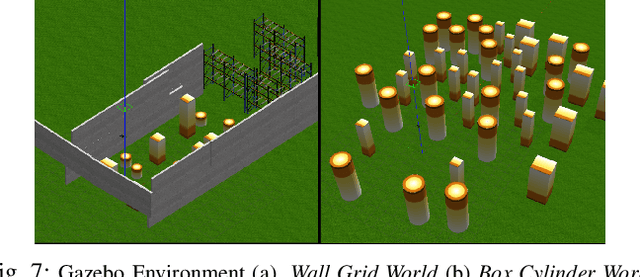
We present UrbanFly: an uncertainty-aware real-time planning framework for quadrotor navigation in urban high-rise environments. A core aspect of UrbanFly is its ability to robustly plan directly on the sparse point clouds generated by a Monocular Visual Inertial SLAM (VINS) backend. It achieves this by using the sparse point clouds to build an uncertainty-integrated cuboid representation of the environment through a data-driven monocular plane segmentation network. Our chosen world model provides faster distance queries than the more common voxel-grid representation, and UrbanFly leverages this capability in two different ways leading to as many trajectory optimizers. The first optimizer uses a gradient-free cross-entropy method to compute trajectories that minimize collision probability and smoothness cost. Our second optimizer is a simplified version of the first and uses a sequential convex programming optimizer initialized based on probabilistic safety estimates on a set of randomly drawn trajectories. Both our trajectory optimizers are made computationally tractable and independent of the nature of underlying uncertainty by embedding the distribution of collision violations in Reproducing Kernel Hilbert Space. Empowered by the algorithmic innovation, UrbanFly outperforms competing baselines in metrics such as collision rate, trajectory length, etc., on a high fidelity AirSim simulator augmented with synthetic and real-world dataset scenes.
CCO-VOXEL: Chance Constrained Optimization over Uncertain Voxel-Grid Representation for Safe Trajectory Planning
Oct 06, 2021
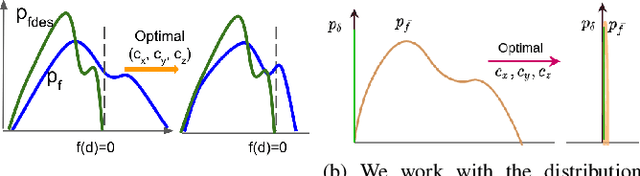
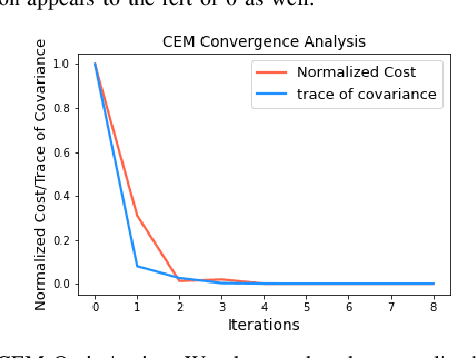
We present CCO-VOXEL: the very first chance-constrained optimization (CCO) algorithm that can compute trajectory plans with probabilistic safety guarantees in real-time directly on the voxel-grid representation of the world. CCO-VOXEL maps the distribution over the distance to the closest obstacle to a distribution over collision-constraint violation and computes an optimal trajectory that minimizes the violation probability. Importantly, unlike existing works, we never assume the nature of the sensor uncertainty or the probability distribution of the resulting collision-constraint violations. We leverage the notion of Hilbert Space embedding of distributions and Maximum Mean Discrepancy (MMD) to compute a tractable surrogate for the original chance-constrained optimization problem and employ a combination of A* based graph-search and Cross-Entropy Method for obtaining its minimum. We show tangible performance gain in terms of collision avoidance and trajectory smoothness as a consequence of our probabilistic formulation vis a vis state-of-the-art planning methods that do not account for such nonparametric noise. Finally, we also show how a combination of low-dimensional feature embedding and pre-caching of Kernel Matrices of MMD allows us to achieve real-time performance in simulations as well as in implementations on on-board commodity hardware that controls the quadrotor flight
ARDOP: A Versatile Humanoid Robotic Research Platform
Aug 18, 2021
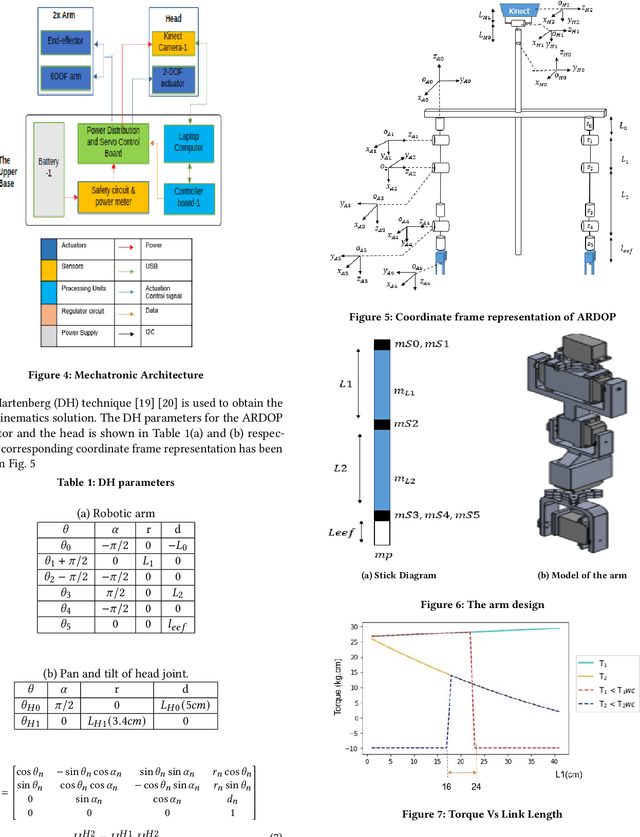
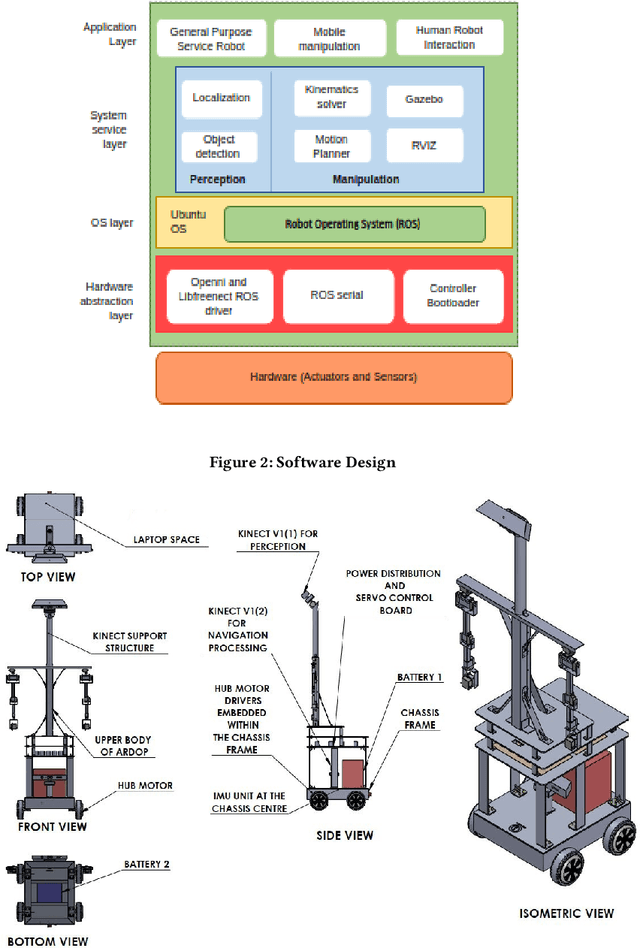
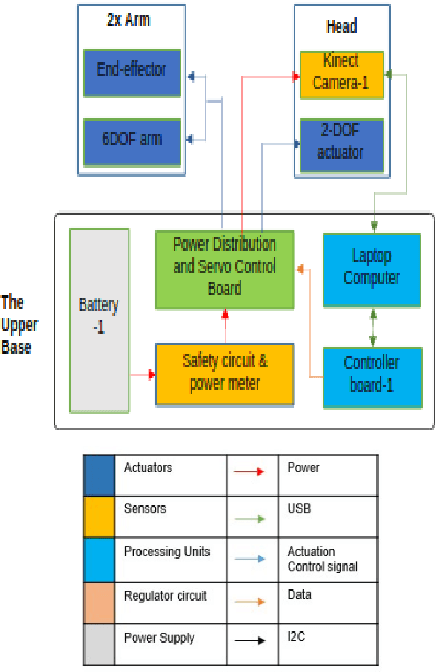
This paper describes the development of a humanoid robot called ARDOP. The goal of the project is to provide a modular, open-source, and inexpensive humanoid robot that would enable researchers to answer various problems related to robotic manipulation and perception. ARDOP primarily comprises of two functional units namely the perception and manipulation system, here we discuss the conceptualization and design methodology of these systems and proceed to present their performance results on simulation and various custom-designed experiments.
Development of GenNav: A Generic Indoor Navigation System for any Mobile Robot
May 18, 2020
The navigation system is at the heart of any mobile robot. It consists of both the SLAM and path planning units, which the robot utilizes to generate a map of the environment, localize itself within it and generate a path to the destination . This paper describes the conceptualization, development, simulation and hardware implementation of GenNav a generic indoor navigation system for any mobile aerial or ground robot. The hardware actuators and software computation units are modularized and made independent of each other, by providing an alternate source of odometry from the Lidar. Hence the actuators used for locomotion are no longer required to carry their own source of odometry and system can be generalized to a wide variety of robots, with different type and orientation of actuators.