Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARDOP: A Versatile Humanoid Robotic Research Platform
Aug 18, 2021
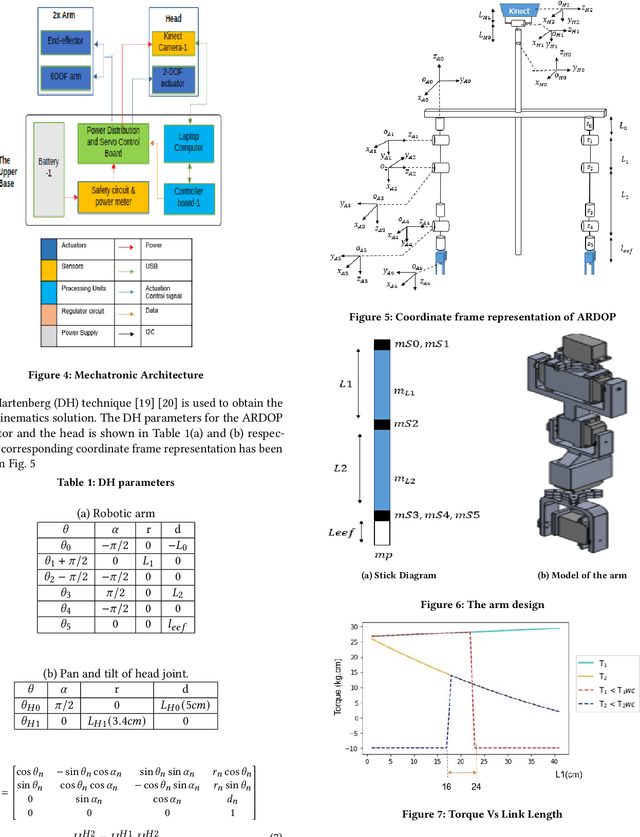
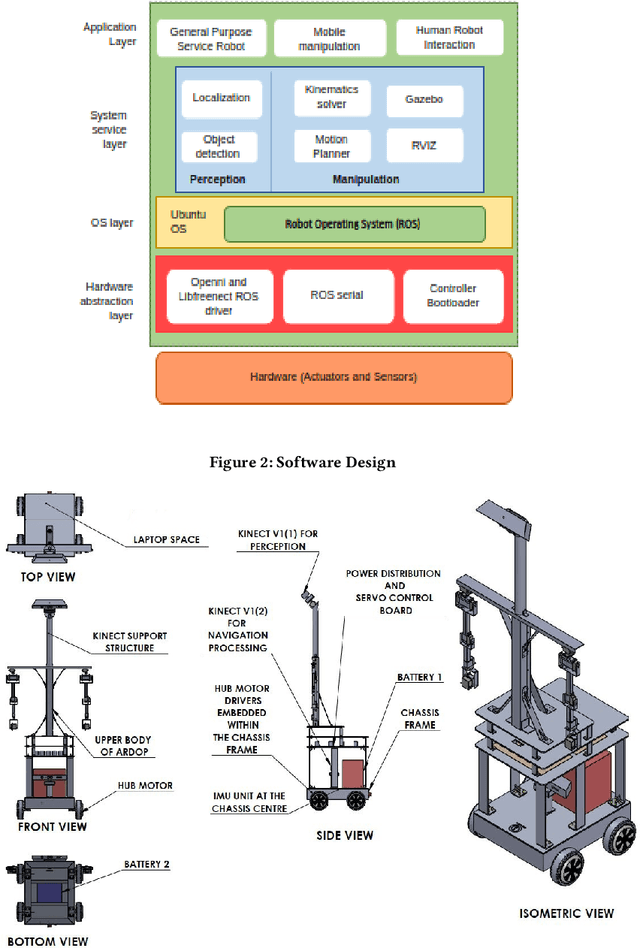
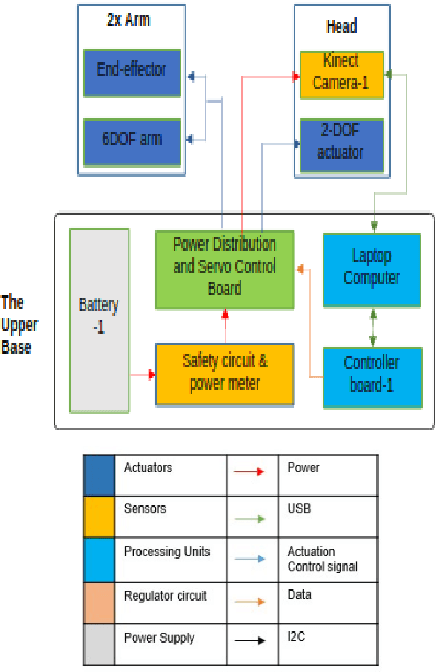
This paper describes the development of a humanoid robot called ARDOP. The goal of the project is to provide a modular, open-source, and inexpensive humanoid robot that would enable researchers to answer various problems related to robotic manipulation and perception. ARDOP primarily comprises of two functional units namely the perception and manipulation system, here we discuss the conceptualization and design methodology of these systems and proceed to present their performance results on simulation and various custom-designed experiments.
* Project page https://ardop.github.io/
Via