 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinderNet: A Data Augmentation Free Canonicalization aided Loop Detection and Closure technique for Point clouds in 6-DOF separation
Apr 03, 2023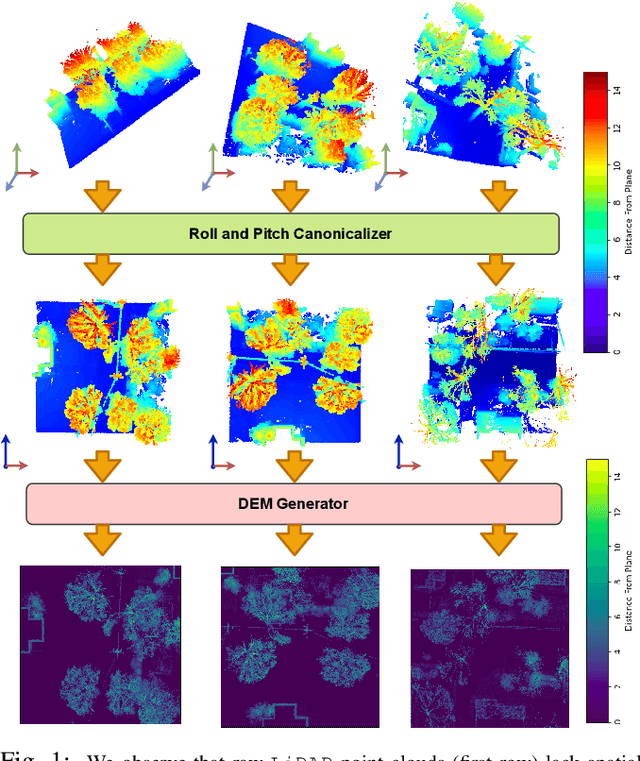
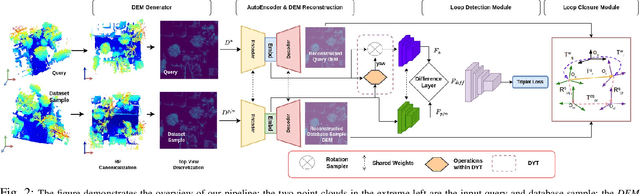
We focus on the problem of LiDAR point cloud based loop detection (or Finding) and closure (LDC) in a multi-agent setting. State-of-the-art (SOTA) techniques directly generate learned embeddings of a given point cloud, require large data transfers, and are not robust to wide variations in 6 Degrees-of-Freedom (DOF) viewpoint. Moreover, absence of strong priors in an unstructured point cloud leads to highly inaccurate LDC. In this original approach, we propose independent roll and pitch canonicalization of the point clouds using a common dominant ground plane. Discretization of the canonicalized point cloud along the axis perpendicular to the ground plane leads to an image similar to Digital Elevation Maps (DEMs), which exposes strong spatial priors in the scene. Our experiments show that LDC based on learnt embeddings of such DEMs is not only data efficient but also significantly more robust, and generalizable than the current SOTA. We report significant performance gain in terms of Average Precision for loop detection and absolute translation/rotation error for relative pose estimation (or loop closure) on Kitti, GPR and Oxford Robot Car over multiple SOTA LDC methods. Our encoder technique allows to compress the original point cloud by over 830 times. To further test the robustness of our technique we create and opensource a custom dataset called Lidar-UrbanFly Dataset (LUF) which consists of point clouds obtained from a LiDAR mounted on a quadrotor.
PTSD in the Wild: A Video Database for Studying Post-Traumatic Stress Disorder Recognition in Unconstrained Environments
Sep 28, 2022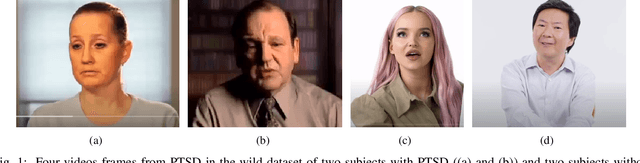
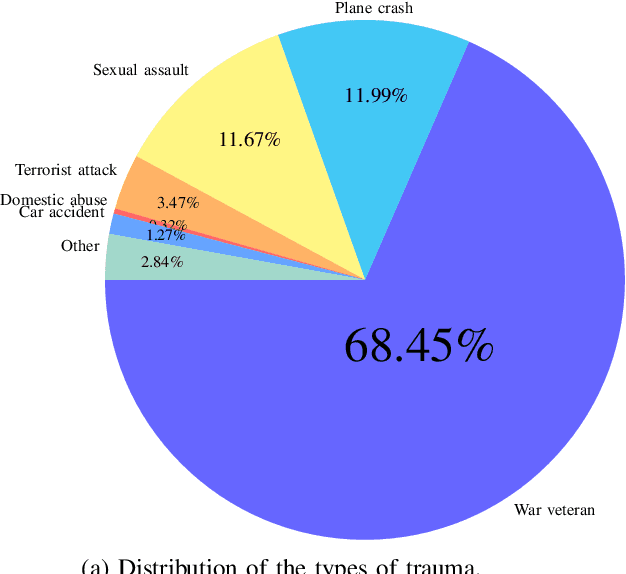
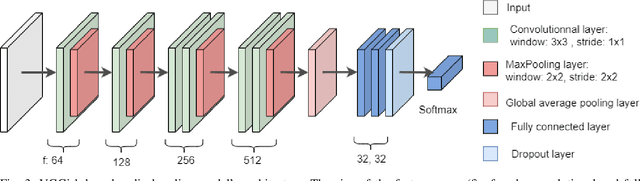
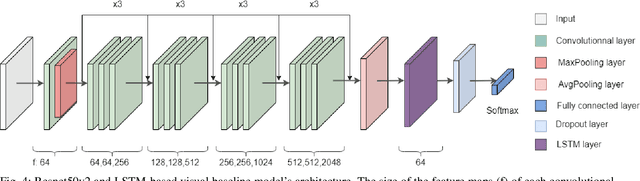
POST-traumatic stress disorder (PTSD) is a chronic and debilitating mental condition that is developed in response to catastrophic life events, such as military combat, sexual assault, and natural disasters. PTSD is characterized by flashbacks of past traumatic events, intrusive thoughts, nightmares, hypervigilance, and sleep disturbance, all of which affect a person's life and lead to considerable social, occupational, and interpersonal dysfunction. The diagnosis of PTSD is done by medical professionals using self-assessment questionnaire of PTSD symptoms as defined in the Diagnostic and Statistical Manual of Mental Disorders (DSM). In this paper, and for the first time, we collected, annotated, and prepared for public distribution a new video database for automatic PTSD diagnosis, called PTSD in the wild dataset. The database exhibits "natural" and big variability in acquisition conditions with different pose, facial expression, lighting, focus, resolution, age, gender, race, occlusions and background. In addition to describing the details of the dataset collection, we provide a benchmark for evaluating computer vision and machine learning based approaches on PTSD in the wild dataset. In addition, we propose and we evaluate a deep learning based approach for PTSD detection in respect to the given benchmark. The proposed approach shows very promising results. Interested researcher can download a copy of PTSD-in-the wild dataset from: http://www.lissi.fr/PTSD-Dataset/
UrbanFly: Uncertainty-Aware Planning for Navigation Amongst High-Rises with Monocular Visual-Inertial SLAM Maps
Apr 02, 2022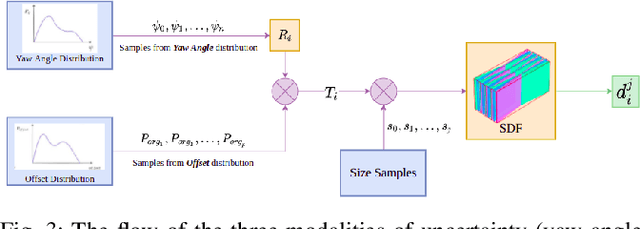
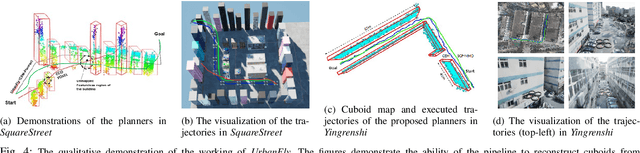
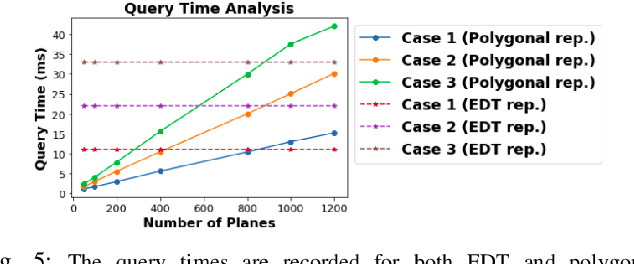
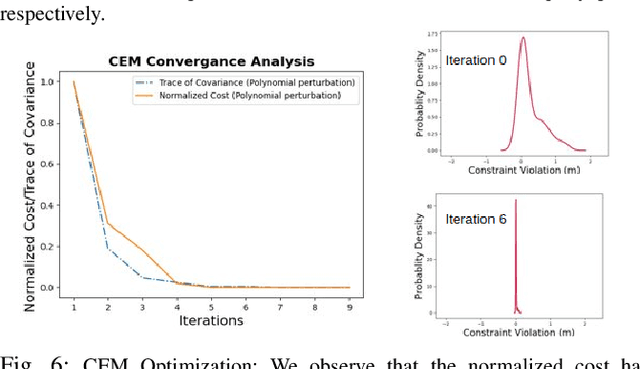
We present UrbanFly: an uncertainty-aware real-time planning framework for quadrotor navigation in urban high-rise environments. A core aspect of UrbanFly is its ability to robustly plan directly on the sparse point clouds generated by a Monocular Visual Inertial SLAM (VINS) backend. It achieves this by using the sparse point clouds to build an uncertainty-integrated cuboid representation of the environment through a data-driven monocular plane segmentation network. Our chosen world model provides faster distance queries than the more common voxel-grid representation, and UrbanFly leverages this capability in two different ways leading to as many trajectory optimizers. The first optimizer uses a gradient-free cross-entropy method to compute trajectories that minimize collision probability and smoothness cost. Our second optimizer is a simplified version of the first and uses a sequential convex programming optimizer initialized based on probabilistic safety estimates on a set of randomly drawn trajectories. Both our trajectory optimizers are made computationally tractable and independent of the nature of underlying uncertainty by embedding the distribution of collision violations in Reproducing Kernel Hilbert Space. Empowered by the algorithmic innovation, UrbanFly outperforms competing baselines in metrics such as collision rate, trajectory length, etc., on a high fidelity AirSim simulator augmented with synthetic and real-world dataset scenes.