 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Adaptive Aerial Manipulation under Unknown Dynamic Coupling Forces
Oct 10, 2024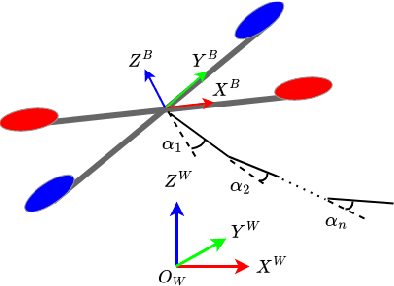
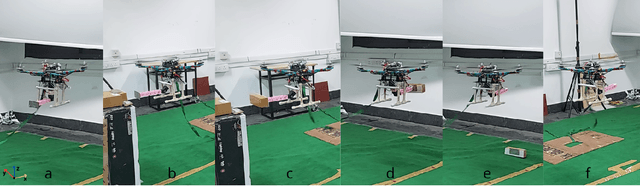
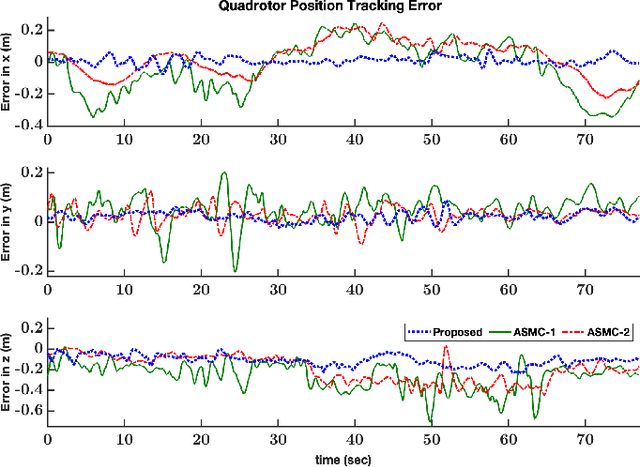
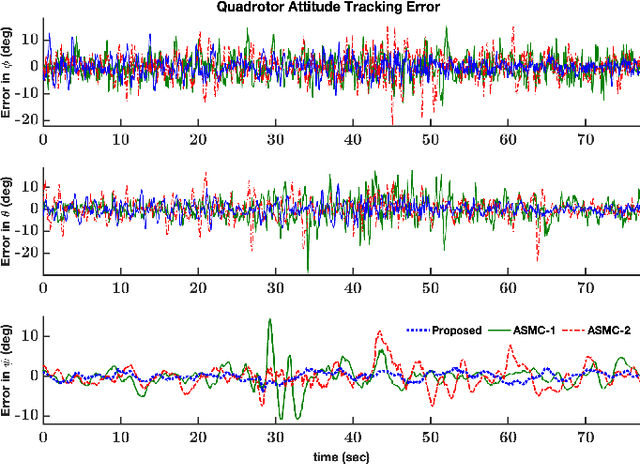
Successful aerial manipulation largely depends on how effectively a controller can tackle the coupling dynamic forces between the aerial vehicle and the manipulator. However, this control problem has remained largely unsolved as the existing control approaches either require precise knowledge of the aerial vehicle/manipulator inertial couplings, or neglect the state-dependent uncertainties especially arising during the interaction phase. This work proposes an adaptive control solution to overcome this long standing control challenge without any a priori knowledge of the coupling dynamic terms. Additionally, in contrast to the existing adaptive control solutions, the proposed control framework is modular, that is, it allows independent tuning of the adaptive gains for the vehicle position sub-dynamics, the vehicle attitude sub-dynamics, and the manipulator sub-dynamics. Stability of the closed loop under the proposed scheme is derived analytically, and real-time experiments validate the effectiveness of the proposed scheme over the state-of-the-art approaches.
Adaptive Artificial Time Delay Control for Robotic Systems
Sep 02, 2024Artificial time delay controller was conceptualised for nonlinear systems to reduce dependency on precise system modelling unlike the conventional adaptive and robust control strategies. In this approach unknown dynamics is compensated by using input and state measurements collected at immediate past time instant (i.e., artificially delayed). The advantage of this kind of approach lies in its simplicity and ease of implementation. However, the applications of artificial time delay controllers in robotics, which are also robust against unknown state-dependent uncertainty, are still missing at large. This thesis presents the study of this control approach toward two important classes of robotic systems, namely a fully actuated bipedal walking robot and an underactuated quadrotor system. In the first work, we explore the idea of a unified control design instead of multiple controllers for different walking phases in adaptive bipedal walking control while bypassing computing constraint forces, since they often lead to complex designs. The second work focuses on quadrotors employed for applications such as payload delivery, inspection and search-and-rescue. The effectiveness of this controller is validated using experimental results.