Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Control of Euler-Lagrange Systems under Time-varying State Constraints without a Priori Bounded Uncertainty
Paper and Code
Oct 31, 2023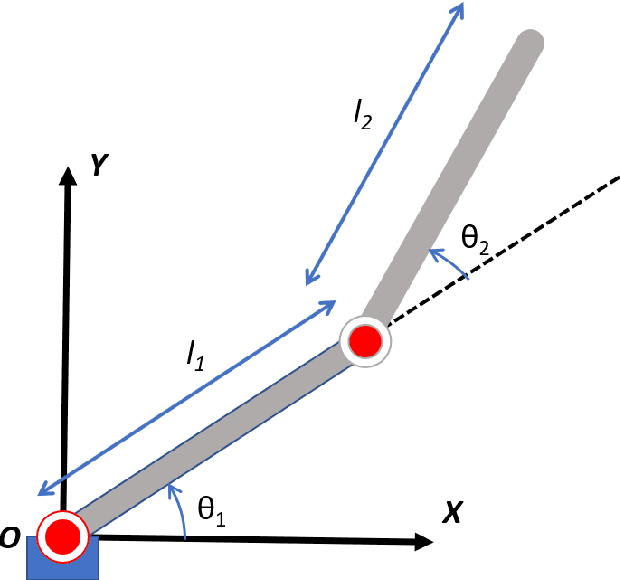
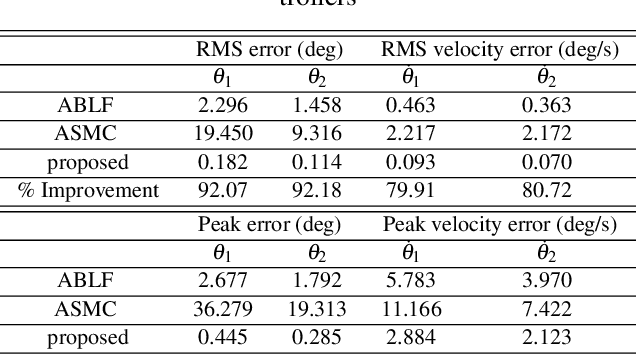
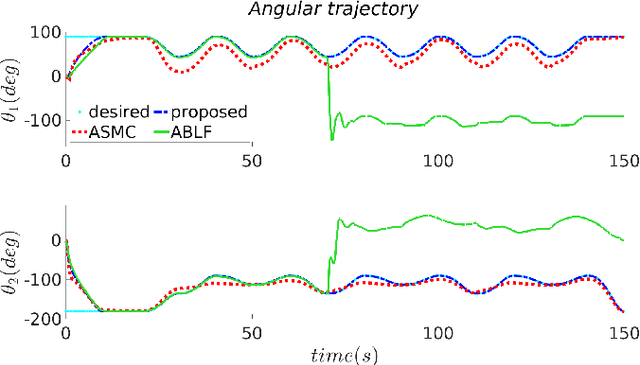
In this article, a novel adaptive controller is designed for Euler-Lagrangian systems under predefined time-varying state constraints. The proposed controller could achieve this objective without a priori knowledge of system parameters and, crucially, of state-dependent uncertainties. The closed-loop stability is verified using the Lyapunov method, while the overall efficacy of the proposed scheme is verified using a simulated robotic arm compared to the state of the art.
* Preprints of the 22nd IFAC World Congress, Yokohama, Japan, July
9-14, 2023
View paper on