 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloud-Assisted Remote Control for Aerial Robots: From Theory to Proof-of-Concept Implementation
Sep 04, 2025Cloud robotics has emerged as a promising technology for robotics applications due to its advantages of offloading computationally intensive tasks, facilitating data sharing, and enhancing robot coordination. However, integrating cloud computing with robotics remains a complex challenge due to network latency, security concerns, and the need for efficient resource management. In this work, we present a scalable and intuitive framework for testing cloud and edge robotic systems. The framework consists of two main components enabled by containerized technology: (a) a containerized cloud cluster and (b) the containerized robot simulation environment. The system incorporates two endpoints of a User Datagram Protocol (UDP) tunnel, enabling bidirectional communication between the cloud cluster container and the robot simulation environment, while simulating realistic network conditions. To achieve this, we consider the use case of cloud-assisted remote control for aerial robots, while utilizing Linux-based traffic control to introduce artificial delay and jitter, replicating variable network conditions encountered in practical cloud-robot deployments.
* 6 pages, 7 figures, CCGridW 2025
xFLIE: Leveraging Actionable Hierarchical Scene Representations for Autonomous Semantic-Aware Inspection Missions
Dec 27, 2024



This article presents xFLIE, a fully integrated 3D hierarchical scene graph based autonomous inspection architecture. Specifically, we present a tightly-coupled solution of incremental 3D Layered Semantic Graphs (LSG) construction and real-time exploitation by a multi-modal autonomy, First-Look based Inspection and Exploration (FLIE) planner, to address the task of inspection of apriori unknown semantic targets of interest in unknown environments. This work aims to address the challenge of maintaining, in addition to or as an alternative to volumetric models, an intuitive scene representation during large-scale inspection missions. Through its contributions, the proposed architecture aims to provide a high-level multi-tiered abstract environment representation whilst simultaneously maintaining a tractable foundation for rapid and informed decision-making capable of enhancing inspection planning through scene understanding, what should it inspect ?, and reasoning, why should it inspect ?. The proposed LSG framework is designed to leverage the concept of nesting lower local graphs, at multiple layers of abstraction, with the abstract concepts grounded on the functionality of the integrated FLIE planner. Through intuitive scene representation, the proposed architecture offers an easily digestible environment model for human operators which helps to improve situational awareness and their understanding of the operating environment. We highlight the use-case benefits of hierarchical and semantic path-planning capability over LSG to address queries, by the integrated planner as well as the human operator. The validity of the proposed architecture is evaluated in large-scale simulated outdoor urban scenarios as well as being deployed onboard a Boston Dynamics Spot quadruped robot for extensive outdoor field experiments.
An Actionable Hierarchical Scene Representation Enhancing Autonomous Inspection Missions in Unknown Environments
Dec 27, 2024



In this article, we present the Layered Semantic Graphs (LSG), a novel actionable hierarchical scene graph, fully integrated with a multi-modal mission planner, the FLIE: A First-Look based Inspection and Exploration planner. The novelty of this work stems from aiming to address the task of maintaining an intuitive and multi-resolution scene representation, while simultaneously offering a tractable foundation for planning and scene understanding during an ongoing inspection mission of apriori unknown targets-of-interest in an unknown environment. The proposed LSG scheme is composed of locally nested hierarchical graphs, at multiple layers of abstraction, with the abstract concepts grounded on the functionality of the integrated FLIE planner. Furthermore, LSG encapsulates real-time semantic segmentation models that offer extraction and localization of desired semantic elements within the hierarchical representation. This extends the capability of the inspection planner, which can then leverage LSG to make an informed decision to inspect a particular semantic of interest. We also emphasize the hierarchical and semantic path-planning capabilities of LSG, which can extend inspection missions by improving situational awareness for human operators in an unknown environment. The validity of the proposed scheme is proven through extensive evaluations of the proposed architecture in simulations, as well as experimental field deployments on a Boston Dynamics Spot quadruped robot in urban outdoor environment settings.
Assisted Physical Interaction: Autonomous Aerial Robots with Neural Network Detection, Navigation, and Safety Layers
Oct 21, 2024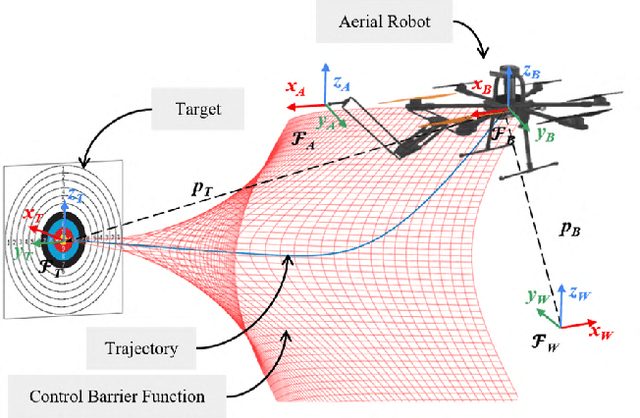

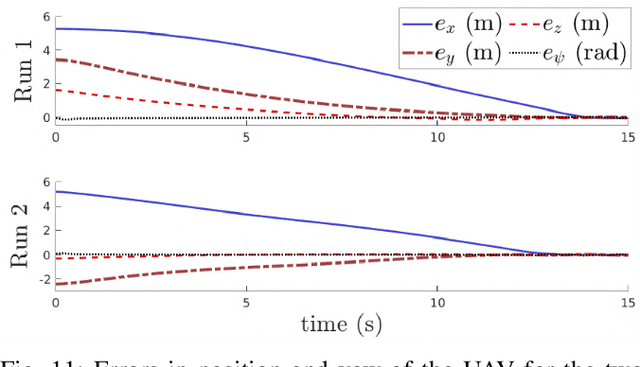

The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.
* 8 pages,14 figures, ICUAS 2024
Cloud-Based Scheduling Mechanism for Scalable and Resource-Efficient Centralized Controllers
Oct 07, 2024This paper proposes a novel approach to address the challenges of deploying complex robotic software in large-scale systems, i.e., Centralized Nonlinear Model Predictive Controllers (CNMPCs) for multi-agent systems. The proposed approach is based on a Kubernetes-based scheduling mechanism designed to monitor and optimize the operation of CNMPCs, while addressing the scalability limitation of centralized control schemes. By leveraging a cluster in a real-time cloud environment, the proposed mechanism effectively offloads the computational burden of CNMPCs. Through experiments, we have demonstrated the effectiveness and performance of our system, especially in scenarios where the number of robots is subject to change. Our work contributes to the advancement of cloud-based control strategies and lays the foundation for enhanced performance in cloud-controlled robotic systems.
Adaptive Control of Euler-Lagrange Systems under Time-varying State Constraints without a Priori Bounded Uncertainty
Oct 31, 2023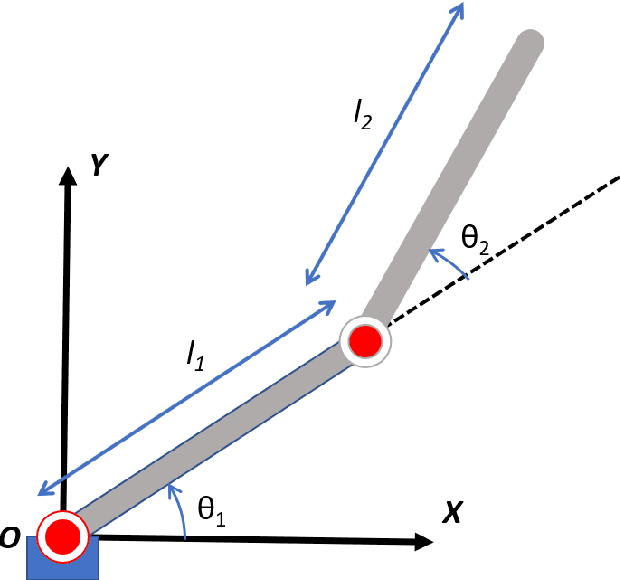
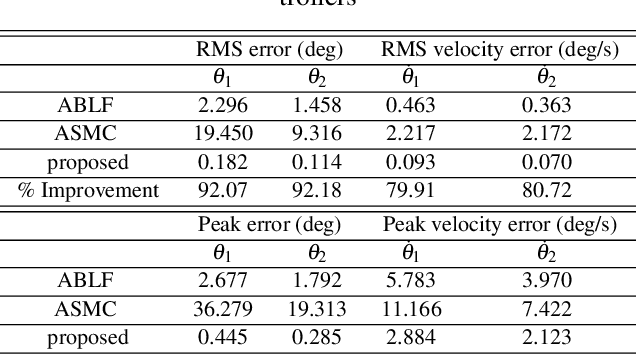
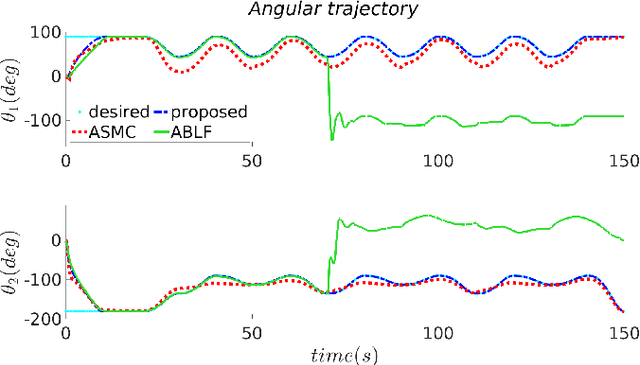
In this article, a novel adaptive controller is designed for Euler-Lagrangian systems under predefined time-varying state constraints. The proposed controller could achieve this objective without a priori knowledge of system parameters and, crucially, of state-dependent uncertainties. The closed-loop stability is verified using the Lyapunov method, while the overall efficacy of the proposed scheme is verified using a simulated robotic arm compared to the state of the art.
A Resilient Framework for 5G-Edge-Connected UAVs based on Switching Edge-MPC and Onboard-PID Control
Oct 24, 2023In recent years, the need for resources for handling processes with high computational complexity for mobile robots is becoming increasingly urgent. More specifically, robots need to autonomously operate in a robust and continuous manner, while keeping high performance, a need that led to the utilization of edge computing to offload many computationally demanding and time-critical robotic procedures. However, safe mechanisms should be implemented to handle situations when it is not possible to use the offloaded procedures, such as if the communication is challenged or the edge cluster is not available. To this end, this article presents a switching strategy for safety, redundancy, and optimized behavior through an edge computing-based Model Predictive Controller (MPC) and a low-level onboard-PID controller for edge-connected Unmanned Aerial Vehicles (UAVs). The switching strategy is based on the communication Key Performance Indicators (KPIs) over 5G to decide whether the UAV should be controlled by the edge-based or have a safe fallback based on the onboard controller.
* 8 pages, 9 figures, isie2023
Towards a Reduced Dependency Framework for Autonomous Unified Inspect-Explore Missions
Sep 01, 2023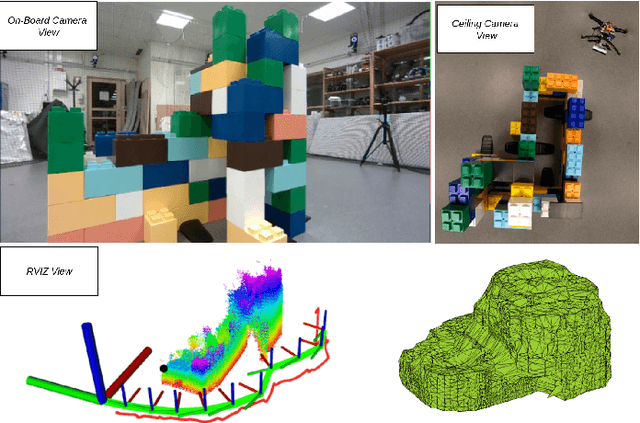

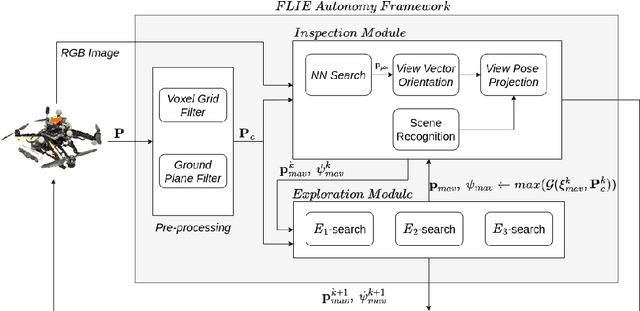

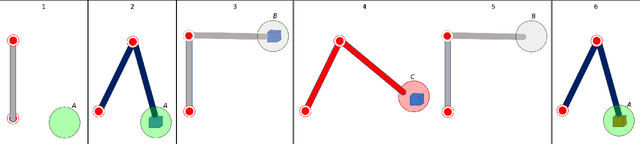
The task of establishing and maintaining situational awareness in an unknown environment is a critical step to fulfil in a mission related to the field of rescue robotics. Predominantly, the problem of visual inspection of urban structures is dealt with view-planning being addressed by map-based approaches. In this article, we propose a novel approach towards effective use of Micro Aerial Vehicles (MAVs) for obtaining a 3-D shape of an unknown structure of objects utilizing a map-independent planning framework. The problem is undertaken via a bifurcated approach to address the task of executing a closer inspection of detected structures with a wider exploration strategy to identify and locate nearby structures, while being equipped with limited sensing capability. The proposed framework is evaluated experimentally in a controlled indoor environment in presence of a mock-up environment validating the efficacy of the proposed inspect-explore policy.
A Kubernetes-Based Edge Architecture for Controlling the Trajectory of a Resource-Constrained Aerial Robot by Enabling Model Predictive Control
Jan 31, 2023In recent years, cloud and edge architectures have gained tremendous focus for offloading computationally heavy applications. From machine learning and Internet of Thing (IOT) to industrial procedures and robotics, cloud computing have been used extensively for data processing and storage purposes, thanks to its "infinite" resources. On the other hand, cloud computing is characterized by long time delays due to the long distance between the cloud servers and the machine requesting the resources. In contrast, edge computing provides almost real-time services since edge servers are located significantly closer to the source of data. This capability sets edge computing as an ideal option for real-time applications, like high level control, for resource-constrained platforms. In order to utilize the edge resources, several technologies, with basic ones as containers and orchestrators like Kubernetes, have been developed to provide an environment with many features, based on each application's requirements. In this context, this works presents the implementation and evaluation of a novel edge architecture based on Kubernetes orchestration for controlling the trajectory of a resource-constrained Unmanned Aerial Vehicle (UAV) by enabling Model Predictive Control (MPC).
* 6 pages, 6 figures, conference article, CSCC 2022
PACED-5G: Predictive Autonomous Control using Edge for Drones over 5G
Jan 30, 2023



With the advent of technologies such as Edge computing, the horizons of remote computational applications have broadened multidimensionally. Autonomous Unmanned Aerial Vehicle (UAV) mission is a vital application to utilize remote computation to catalyze its performance. However, offloading computational complexity to a remote system increases the latency in the system. Though technologies such as 5G networking minimize communication latency, the effects of latency on the control of UAVs are inevitable and may destabilize the system. Hence, it is essential to consider the delays in the system and compensate for them in the control design. Therefore, we propose a novel Edge-based predictive control architecture enabled by 5G networking, PACED-5G (Predictive Autonomous Control using Edge for Drones over 5G). In the proposed control architecture, we have designed a state estimator for estimating the current states based on the available knowledge of the time-varying delays, devised a Model Predictive controller (MPC) for the UAV to track the reference trajectory while avoiding obstacles, and provided an interface to offload the high-level tasks over Edge systems. The proposed architecture is validated in two experimental test cases using a quadrotor UAV.