 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World Deployment of a 5G-Connected Edge-Controlled Aerial Robot in Industrial Subterranean Mines
Jun 03, 2026This article presents the first real-world autonomous flight of a 5G-connected aerial robot controlled by an edge-offloaded controller, and aims to bridge the gap between controlled and factual setups. The robot operates within an active industrial subterranean mine, while the high-level controller is deployed in a nearby Kubernetes-based edge cluster. Communication between the robot and the edge is enabled via a 5G New Radio (NR) Standalone (SA) network. The chosen controller is a Model Predictive Controller (MPC), which generates control actions to allow the robot to navigate seamlessly through the mining environment. A human operator selects waypoints for the aerial robot, and the MPC generates smooth, collision-free paths for autonomous executions. The proposed 5G edge-based closed-loop system is evaluated in a real industrial setting and demonstrates the potential of edge-controlled robotic systems toward time-critical, safe and efficient future deployments.
Real-time Point Cloud Data Transmission via L4S for 5G-Edge-Assisted Robotics
Nov 11, 2025This article presents a novel framework for real-time Light Detection and Ranging (LiDAR) data transmission that leverages rate-adaptive technologies and point cloud encoding methods to ensure low-latency, and low-loss data streaming. The proposed framework is intended for, but not limited to, robotic applications that require real-time data transmission over the internet for offloaded processing. Specifically, the Low Latency, Low Loss, Scalable Throughput L4S-enabled SCReAM v2 transmission framework is extended to incorporate the Draco geometry compression algorithm, enabling dynamic compression of high-bitrate 3D LiDAR data according to the sensed channel capacity and network load. The low-latency 3D LiDAR streaming system is designed to maintain minimal end-to-end delay while constraining encoding errors to meet the accuracy requirements of robotic applications. We demonstrate the effectiveness of the proposed method through real-world experiments conducted over a public 5G network across multi-kilometer urban environments. The low-latency and low-loss requirements are preserved, while real-time offloading and evaluation of 3D SLAM algorithms are used to validate the framework's performance in practical use cases.
Cloud-Assisted Remote Control for Aerial Robots: From Theory to Proof-of-Concept Implementation
Sep 04, 2025Cloud robotics has emerged as a promising technology for robotics applications due to its advantages of offloading computationally intensive tasks, facilitating data sharing, and enhancing robot coordination. However, integrating cloud computing with robotics remains a complex challenge due to network latency, security concerns, and the need for efficient resource management. In this work, we present a scalable and intuitive framework for testing cloud and edge robotic systems. The framework consists of two main components enabled by containerized technology: (a) a containerized cloud cluster and (b) the containerized robot simulation environment. The system incorporates two endpoints of a User Datagram Protocol (UDP) tunnel, enabling bidirectional communication between the cloud cluster container and the robot simulation environment, while simulating realistic network conditions. To achieve this, we consider the use case of cloud-assisted remote control for aerial robots, while utilizing Linux-based traffic control to introduce artificial delay and jitter, replicating variable network conditions encountered in practical cloud-robot deployments.
* 6 pages, 7 figures, CCGridW 2025
Environmental Awareness Dynamic 5G QoS for Retaining Real Time Constraints in Robotic Applications
Feb 09, 2024



The fifth generation (5G) cellular network technology is mature and increasingly utilized in many industrial and robotics applications, while an important functionality is the advanced Quality of Service (QoS) features. Despite the prevalence of 5G QoS discussions in the related literature, there is a notable absence of real-life implementations and studies concerning their application in time-critical robotics scenarios. This article considers the operation of time-critical applications for 5G-enabled unmanned aerial vehicles (UAVs) and how their operation can be improved by the possibility to dynamically switch between QoS data flows with different priorities. As such, we introduce a robotics oriented analysis on the impact of the 5G QoS functionality on the performance of 5G-enabled UAVs. Furthermore, we introduce a novel framework for the dynamic selection of distinct 5G QoS data flows that is autonomously managed by the 5G-enabled UAV. This problem is addressed in a novel feedback loop fashion utilizing a probabilistic finite state machine (PFSM). Finally, the efficacy of the proposed scheme is experimentally validated with a 5G-enabled UAV in a real-world 5G stand-alone (SA) network.
A Resilient Framework for 5G-Edge-Connected UAVs based on Switching Edge-MPC and Onboard-PID Control
Oct 24, 2023In recent years, the need for resources for handling processes with high computational complexity for mobile robots is becoming increasingly urgent. More specifically, robots need to autonomously operate in a robust and continuous manner, while keeping high performance, a need that led to the utilization of edge computing to offload many computationally demanding and time-critical robotic procedures. However, safe mechanisms should be implemented to handle situations when it is not possible to use the offloaded procedures, such as if the communication is challenged or the edge cluster is not available. To this end, this article presents a switching strategy for safety, redundancy, and optimized behavior through an edge computing-based Model Predictive Controller (MPC) and a low-level onboard-PID controller for edge-connected Unmanned Aerial Vehicles (UAVs). The switching strategy is based on the communication Key Performance Indicators (KPIs) over 5G to decide whether the UAV should be controlled by the edge-based or have a safe fallback based on the onboard controller.
* 8 pages, 9 figures, isie2023
PACED-5G: Predictive Autonomous Control using Edge for Drones over 5G
Jan 30, 2023



With the advent of technologies such as Edge computing, the horizons of remote computational applications have broadened multidimensionally. Autonomous Unmanned Aerial Vehicle (UAV) mission is a vital application to utilize remote computation to catalyze its performance. However, offloading computational complexity to a remote system increases the latency in the system. Though technologies such as 5G networking minimize communication latency, the effects of latency on the control of UAVs are inevitable and may destabilize the system. Hence, it is essential to consider the delays in the system and compensate for them in the control design. Therefore, we propose a novel Edge-based predictive control architecture enabled by 5G networking, PACED-5G (Predictive Autonomous Control using Edge for Drones over 5G). In the proposed control architecture, we have designed a state estimator for estimating the current states based on the available knowledge of the time-varying delays, devised a Model Predictive controller (MPC) for the UAV to track the reference trajectory while avoiding obstacles, and provided an interface to offload the high-level tasks over Edge systems. The proposed architecture is validated in two experimental test cases using a quadrotor UAV.
Edge Computing Architectures for Enabling the Realisation of the Next Generation Robotic Systems
Sep 17, 2022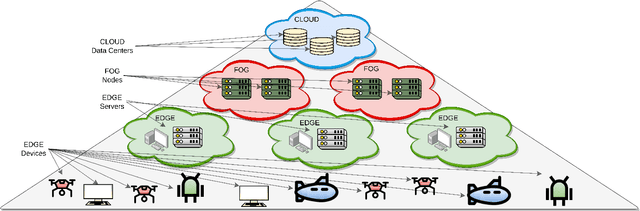
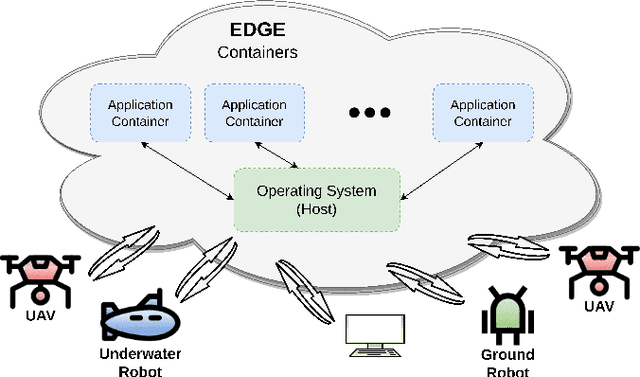
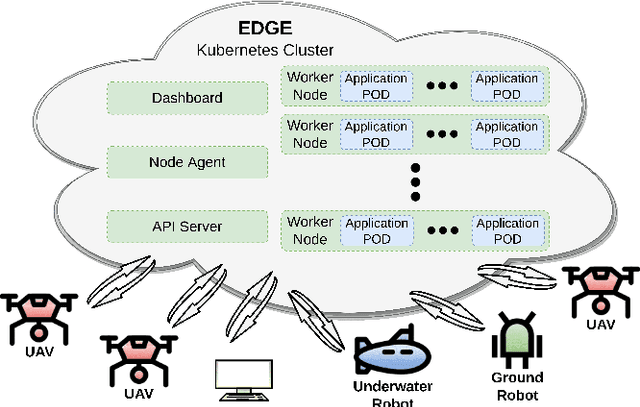
Edge Computing is a promising technology to provide new capabilities in technological fields that require instantaneous data processing. Researchers in areas such as machine and deep learning use extensively edge and cloud computing for their applications, mainly due to the significant computational and storage resources that they provide. Currently, Robotics is seeking to take advantage of these capabilities as well, and with the development of 5G networks, some existing limitations in the field can be overcome. In this context, it is important to know how to utilize the emerging edge architectures, what types of edge architectures and platforms exist today and which of them can and should be used based on each robotic application. In general, Edge platforms can be implemented and used differently, especially since there are several providers offering more or less the same set of services with some essential differences. Thus, this study addresses these discussions for those who work in the development of the next generation robotic systems and will help to understand the advantages and disadvantages of each edge computing architecture in order to choose wisely the right one for each application.