 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssisted Physical Interaction: Autonomous Aerial Robots with Neural Network Detection, Navigation, and Safety Layers
Oct 21, 2024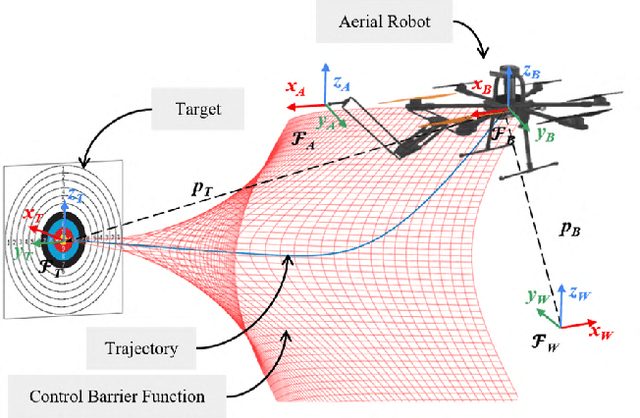

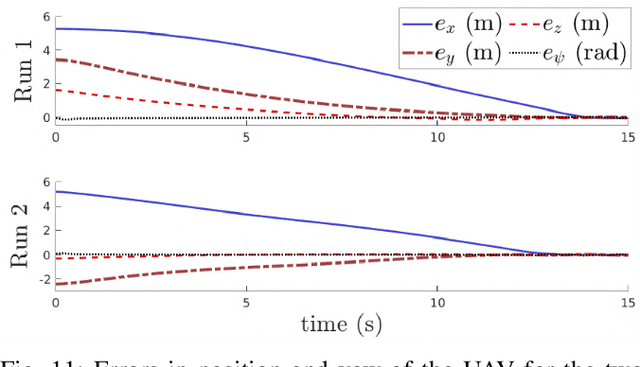

The paper introduces a novel framework for safe and autonomous aerial physical interaction in industrial settings. It comprises two main components: a neural network-based target detection system enhanced with edge computing for reduced onboard computational load, and a control barrier function (CBF)-based controller for safe and precise maneuvering. The target detection system is trained on a dataset under challenging visual conditions and evaluated for accuracy across various unseen data with changing lighting conditions. Depth features are utilized for target pose estimation, with the entire detection framework offloaded into low-latency edge computing. The CBF-based controller enables the UAV to converge safely to the target for precise contact. Simulated evaluations of both the controller and target detection are presented, alongside an analysis of real-world detection performance.
* 8 pages,14 figures, ICUAS 2024
Design of a Flexible Robot Arm for Safe Aerial Physical Interaction
Oct 21, 2024



This paper introduces a novel compliant mechanism combining lightweight and energy dissipation for aerial physical interaction. Weighting 400~g at take-off, the mechanism is actuated in the forward body direction, enabling precise position control for force interaction and various other aerial manipulation tasks. The robotic arm, structured as a closed-loop kinematic chain, employs two deported servomotors. Each joint is actuated with a single tendon for active motion control in compression of the arm at the end-effector. Its elasto-mechanical design reduces weight and provides flexibility, allowing passive-compliant interactions without impacting the motors' integrity. Notably, the arm's damping can be adjusted based on the proposed inner frictional bulges. Experimental applications showcase the aerial system performance in both free-flight and physical interaction. The presented work may open safer applications for \ac{MAV} in real environments subject to perturbations during interaction.
* 6 pages, 7 figures, ROBOSOFT 2024
Design and Control of an Omnidirectional Aerial Robot with a Miniaturized Haptic Joystick for Physical Interaction
Oct 11, 2024Fully actuated aerial robot proved their superiority for Aerial Physical Interaction (APhI) over the past years. This work proposes a minimal setup for aerial telemanipulation, enhancing accessibility of these technologies. The design and the control of a 6-DoF joystick with 4-DoF haptic feedback is detailed. It is the first haptic device with standard Remote Controller (RC) form factor for APhI. By miniaturizing haptic device, it enhances RC with the sense of touch, increasing physical awareness. The goal is to give operators an extra sense, other than vision and sound, to help to perform safe APhI. To the best of the authors knowledge, this is the first teleoperation system able to decouple each single axis input command. On the omnidirectional quadrotor, by reducing the number of components with a new design, we aim a simplified maintenance, and improved force and thrust to weight ratio. Open-sourced physic based simulation and successful preliminary flight tests highlighted the tool as promising for future APhI applications.