 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of an Omnidirectional Aerial Robot with a Miniaturized Haptic Joystick for Physical Interaction
Oct 11, 2024

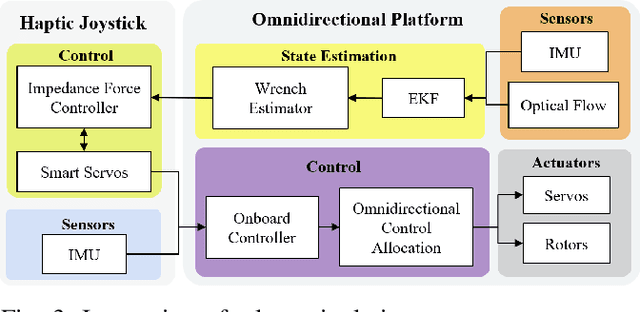

Fully actuated aerial robot proved their superiority for Aerial Physical Interaction (APhI) over the past years. This work proposes a minimal setup for aerial telemanipulation, enhancing accessibility of these technologies. The design and the control of a 6-DoF joystick with 4-DoF haptic feedback is detailed. It is the first haptic device with standard Remote Controller (RC) form factor for APhI. By miniaturizing haptic device, it enhances RC with the sense of touch, increasing physical awareness. The goal is to give operators an extra sense, other than vision and sound, to help to perform safe APhI. To the best of the authors knowledge, this is the first teleoperation system able to decouple each single axis input command. On the omnidirectional quadrotor, by reducing the number of components with a new design, we aim a simplified maintenance, and improved force and thrust to weight ratio. Open-sourced physic based simulation and successful preliminary flight tests highlighted the tool as promising for future APhI applications.
Development of a semi-autonomous framework for NDT inspection with a tilting aerial platform
Jul 03, 2024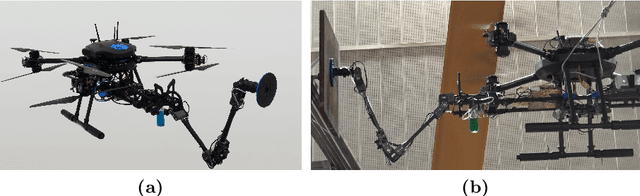
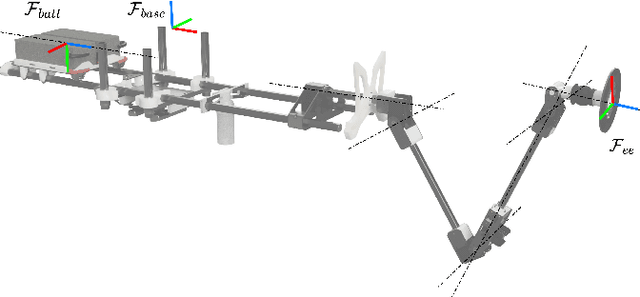
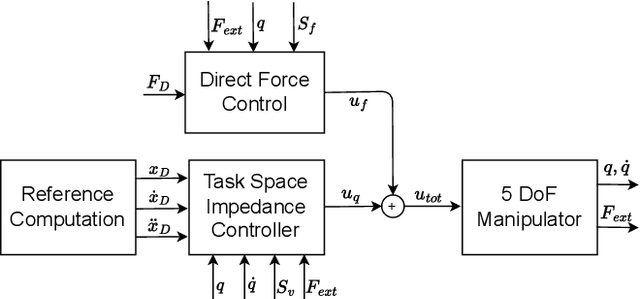
This letter investigates the problem of controlling an aerial manipulator, composed of an omnidirectional tilting drone equipped with a five-degrees-of-freedom robotic arm. The robot has to interact with the environment to inspect structures and perform non-destructive measurements. A parallel force-impedance control technique is developed to establish contact with the designed surface with a desired force profile. During the interaction, a pushing phase is required to create a vacuum between the surface and the echometer sensor mounted at the end-effector, to measure the thickness of the interaction surface. Repetitive measures are performed to show the repeatability of the algorithm.