 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling High-Curvature Navigation in Eversion Robots through Buckle-Inducing Constrictive Bands
Jan 18, 2026Tip-growing eversion robots are renowned for their ability to access remote spaces through narrow passages. However, achieving reliable navigation remains a significant challenge. Existing solutions often rely on artificial muscles integrated into the robot body or active tip-steering mechanisms. While effective, these additions introduce structural complexity and compromise the defining advantages of eversion robots: their inherent softness and compliance. In this paper, we propose a passive approach to reduce bending stiffness by purposefully introducing buckling points along the robot's outer wall. We achieve this by integrating inextensible diameter-reducing circumferential bands at regular intervals along the robot body facilitating forward motion through tortuous, obstacle cluttered paths. Rather than relying on active steering, our approach leverages the robot's natural interaction with the environment, allowing for smooth, compliant navigation. We present a Cosserat rod-based mathematical model to quantify this behavior, capturing the local stiffness reductions caused by the constricting bands and their impact on global bending mechanics. Experimental results demonstrate that these bands reduce the robot's stiffness when bent at the tip by up to 91 percent, enabling consistent traversal of 180 degree bends with a bending radius of as low as 25 mm-notably lower than the 35 mm achievable by standard eversion robots under identical conditions. The feasibility of the proposed method is further demonstrated through a case study in a colon phantom. By significantly improving maneuverability without sacrificing softness or increasing mechanical complexity, this approach expands the applicability of eversion robots in highly curved pathways, whether in relation to pipe inspection or medical procedures such as colonoscopy.
Development of a semi-autonomous framework for NDT inspection with a tilting aerial platform
Jul 03, 2024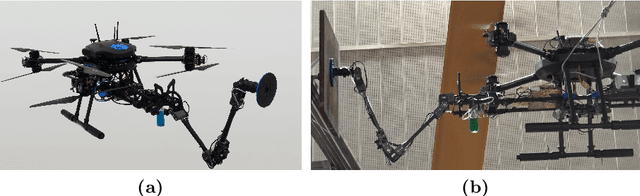
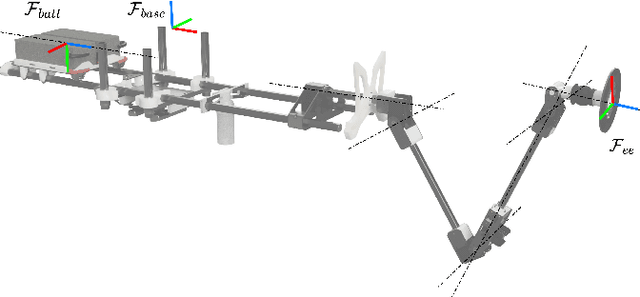
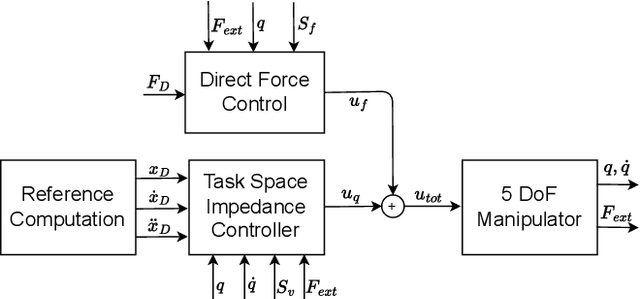
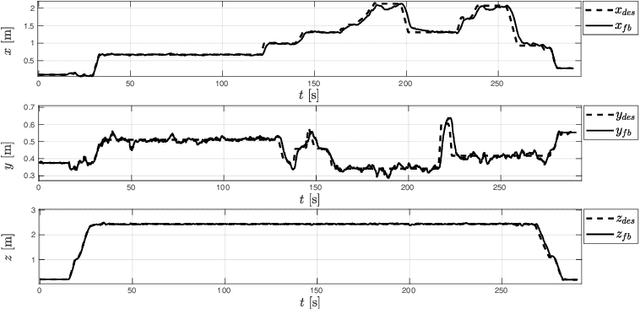
This letter investigates the problem of controlling an aerial manipulator, composed of an omnidirectional tilting drone equipped with a five-degrees-of-freedom robotic arm. The robot has to interact with the environment to inspect structures and perform non-destructive measurements. A parallel force-impedance control technique is developed to establish contact with the designed surface with a desired force profile. During the interaction, a pushing phase is required to create a vacuum between the surface and the echometer sensor mounted at the end-effector, to measure the thickness of the interaction surface. Repetitive measures are performed to show the repeatability of the algorithm.
A General Framework for Hierarchical Redundancy Resolution Under Arbitrary Constraints
Apr 08, 2022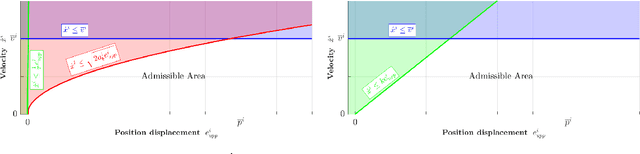
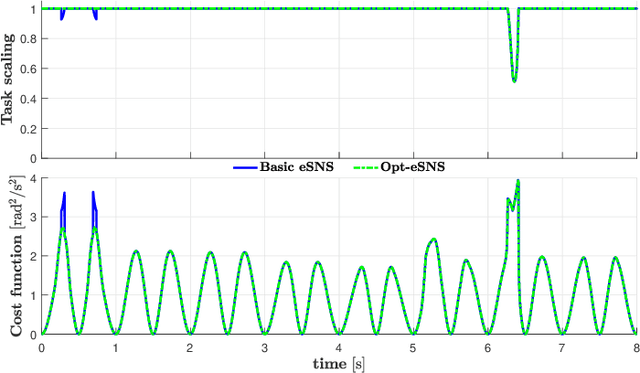
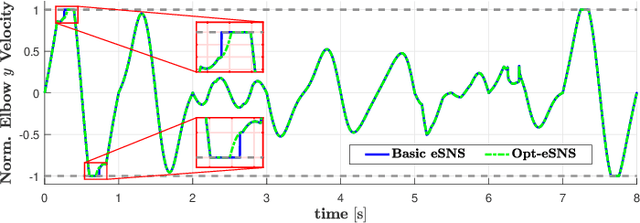

The increasing interest in autonomous robots with a high number of degrees of freedom for industrial applications and service robotics demands control algorithms to handle multiple tasks as well as hard constraints efficiently. This paper presents a general framework in which both kinematic (velocity- or acceleration-based) and dynamic (torque-based) control of redundant robots are handled in a unified fashion. The framework allows for the specification of redundancy resolution problems featuring a hierarchy of arbitrary (equality and inequality) constraints, arbitrary weighting of the control effort in the cost function and an additional input used to optimize possibly remaining redundancy. To solve such problems, a generalization of the Saturation in the Null Space (SNS) algorithm is introduced, which extends the original method according to the features required by our general control framework. Variants of the developed algorithm are presented, which ensure both efficient computation and optimality of the solution. Experiments on a KUKA LBRiiwa robotic arm, as well as simulations with a highly redundant mobile manipulator are reported.
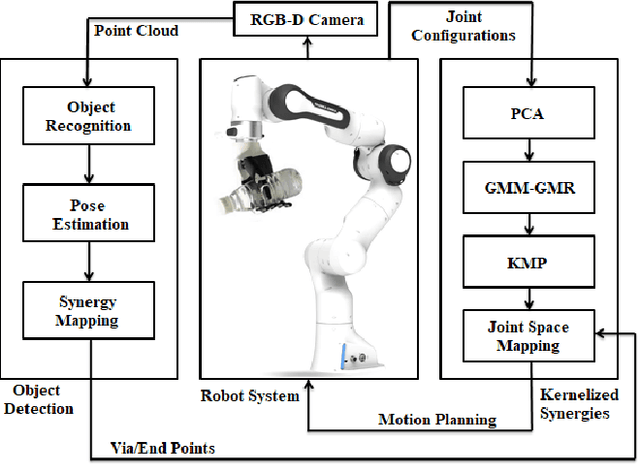
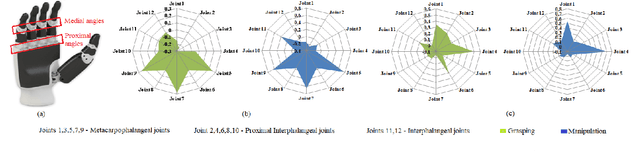
Fusing Visuo-Tactile Perception into Kernelized Synergies for Robust Grasping and Fine Manipulation of Non-rigid Objects
Sep 15, 2021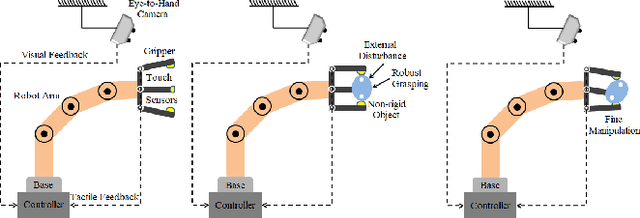
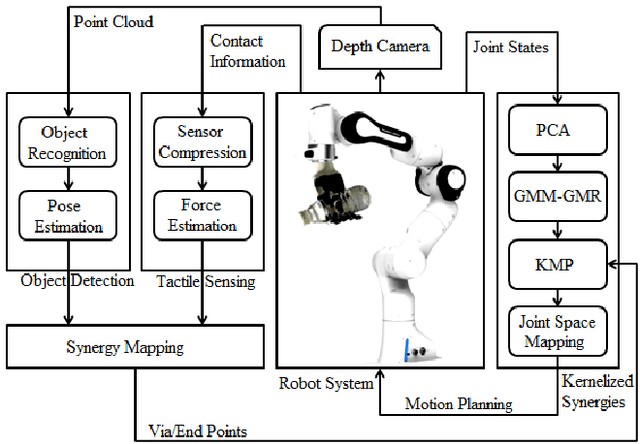
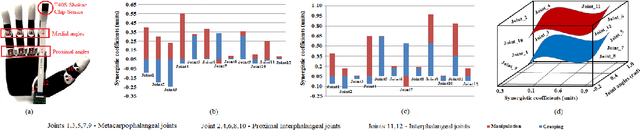
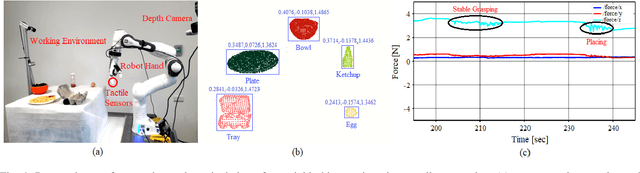
Handling non-rigid objects using robot hands necessities a framework that does not only incorporate human-level dexterity and cognition but also the multi-sensory information and system dynamics for robust and fine interactions. In this research, our previously developed kernelized synergies framework, inspired from human behaviour on reusing same subspace for grasping and manipulation, is augmented with visuo-tactile perception for autonomous and flexible adaptation to unknown objects. To detect objects and estimate their poses, a simplified visual pipeline using RANSAC algorithm with Euclidean clustering and SVM classifier is exploited. To modulate interaction efforts while grasping and manipulating non-rigid objects, the tactile feedback using T40S shokac chip sensor, generating 3D force information, is incorporated. Moreover, different kernel functions are examined in the kernelized synergies framework, to evaluate its performance and potential against task reproducibility, execution, generalization and synergistic re-usability. Experiments performed with robot arm-hand system validates the capability and usability of upgraded framework on stably grasping and dexterously manipulating the non-rigid objects.
Formulating Intuitive Stack-of-Tasks with Visuo-Tactile Perception for Collaborative Human-Robot Fine Manipulation
Mar 09, 2021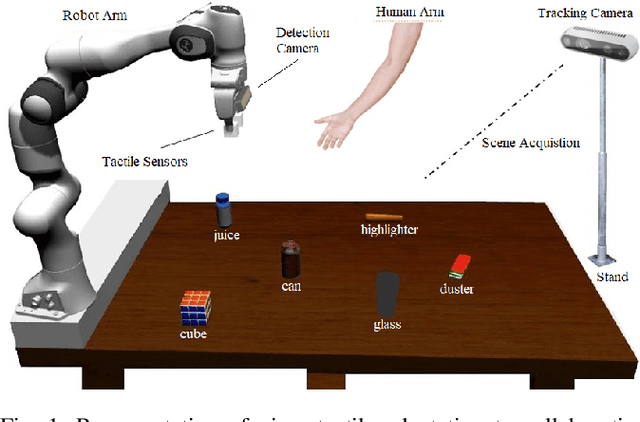
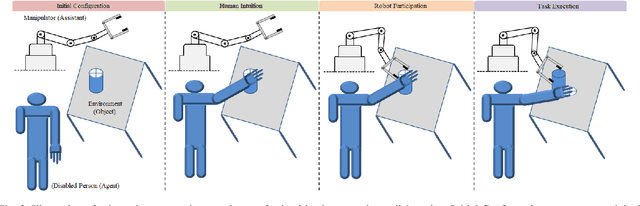
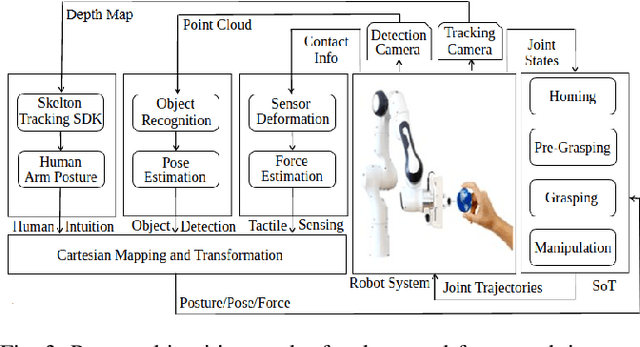
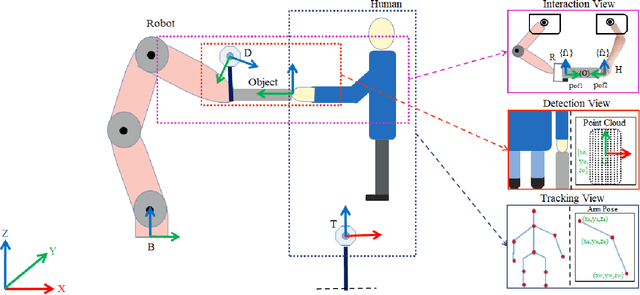
Enabling robots to work in close proximity with humans necessitates to employ not only multi-sensory information for coordinated and autonomous interactions but also a control framework that ensures adaptive and flexible collaborative behavior. Such a control framework needs to integrate accuracy and repeatability of robots with cognitive ability and adaptability of humans for co-manipulation. In this regard, an intuitive stack of tasks (iSOT) formulation is proposed, that defines the robots actions based on human ergonomics and task progress. The framework is augmented with visuo-tactile perception for flexible interaction and autonomous adaption. The visual information using depth cameras, monitors and estimates the object pose and human arm gesture while the tactile feedback provides exploration skills for maintaining the desired contact to avoid slippage. Experiments conducted on robot system with human partnership for assembly and disassembly tasks confirm the effectiveness and usability of proposed framework.
Vision Based Adaptation to Kernelized Synergies for Human Inspired Robotic Manipulation
Dec 13, 2020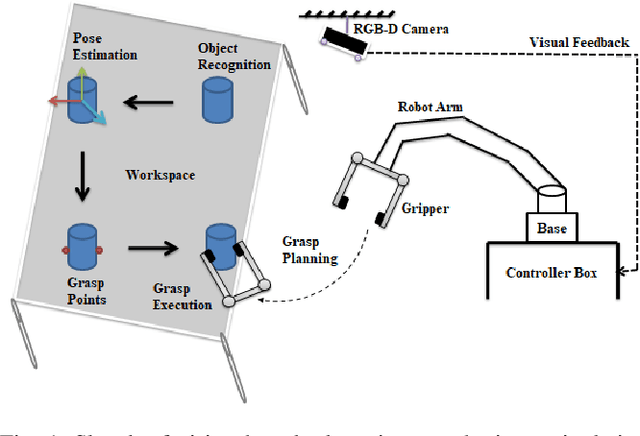

Humans in contrast to robots are excellent in performing fine manipulation tasks owing to their remarkable dexterity and sensorimotor organization. Enabling robots to acquire such capabilities, necessitates a framework that not only replicates the human behaviour but also integrates the multi-sensory information for autonomous object interaction. To address such limitations, this research proposes to augment the previously developed kernelized synergies framework with visual perception to automatically adapt to the unknown objects. The kernelized synergies, inspired from humans, retain the same reduced subspace for object grasping and manipulation. To detect object in the scene, a simplified perception pipeline is used that leverages the RANSAC algorithm with Euclidean clustering and SVM for object segmentation and recognition respectively. Further, the comparative analysis of kernelized synergies with other state of art approaches is made to confirm their flexibility and effectiveness on the robotic manipulation tasks. The experiments conducted on the robot hand confirm the robustness of modified kernelized synergies framework against the uncertainties related to the perception of environment.
Force and state-feedback control for robots with non-collocated environmental and actuator forces
Oct 24, 2020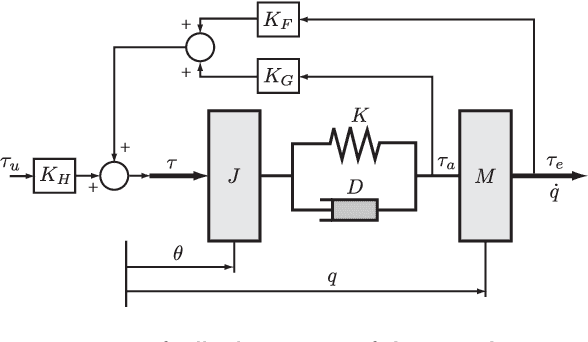
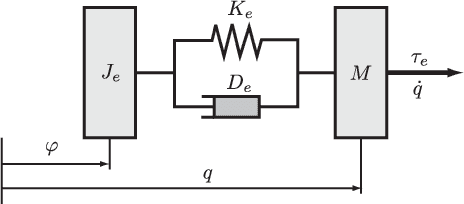
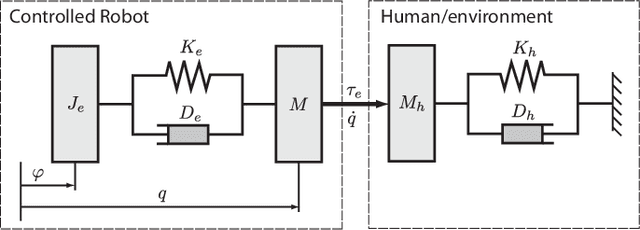
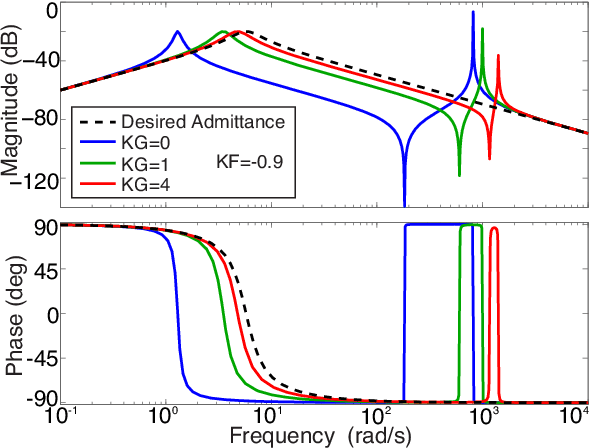
In this paper, we present an impedance control design for multi-variable linear and nonlinear robotic systems. The control design considers force and state feedback to improve the performance of the closed loop. Simultaneous feedback of forces and states allows the controller for an extra degree of freedom to approximate the desired impedance port behaviour. A numerical analysis is used to demonstrate the desired impedance closed-loop behaviour.
Leveraging Kernelized Synergies on Shared Subspace for Precision Grasp and Dexterous Manipulation
Sep 03, 2020

Manipulation in contrast to grasping is a trajectorial task that needs to use dexterous hands. Improving the dexterity of robot hands, increases the controller complexity and thus requires to use the concept of postural synergies. Inspired from postural synergies, this research proposes a new framework called kernelized synergies that focuses on the re-usability of the same subspace for precision grasping and dexterous manipulation. In this work, the computed subspace of postural synergies; parameterized by probabilistic movement primitives, is treated with kernel to preserve its grasping and manipulation characteristics and allows its reuse for new objects. The grasp stability of the proposed framework is assessed with a force closure quality index. For performance evaluation, the proposed framework is tested on two different simulated robot hand models using the Syngrasp toolbox and experimentally, four complex grasping and manipulation tasks are performed and reported. The results confirm the hand agnostic approach of the proposed framework and its generalization to distinct objects irrespective of their shape and size.
Reproducible Pruning System on Dynamic Natural Plants for Field Agricultural Robots
Aug 26, 2020
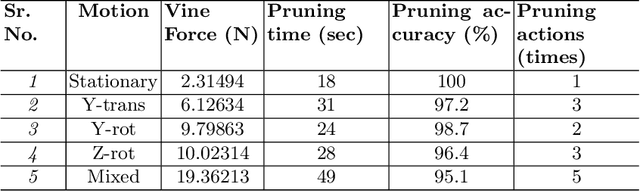
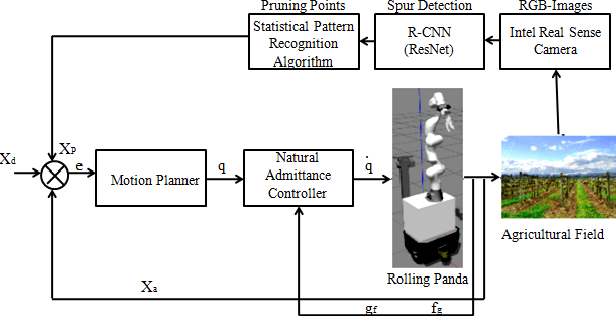
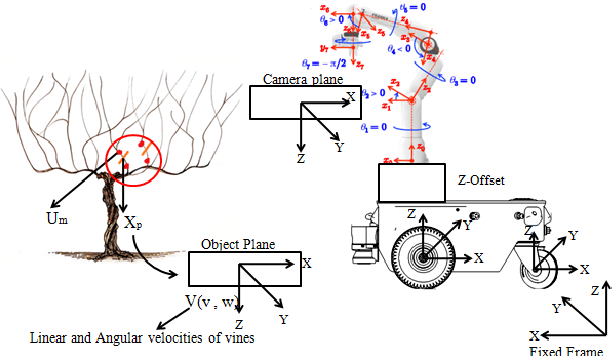
Pruning is the art of cutting unwanted and unhealthy plant branches and is one of the difficult tasks in the field robotics. It becomes even more complex when the plant branches are moving. Moreover, the reproducibility of robot pruning skills is another challenge to deal with due to the heterogeneous nature of vines in the vineyard. This research proposes a multi-modal framework to deal with the dynamic vines with the aim of sim2real skill transfer. The 3D models of vines are constructed in blender engine and rendered in simulated environment as a need for training the robot. The Natural Admittance Controller (NAC) is applied to deal with the dynamics of vines. It uses force feedback and compensates the friction effects while maintaining the passivity of system. The faster R-CNN is used to detect the spurs on the vines and then statistical pattern recognition algorithm using K-means clustering is applied to find the effective pruning points. The proposed framework is tested in simulated and real environments.
Physical Human-Robot Interaction with a Tethered Aerial Vehicle: Application to a Force-based Human Guiding Problem
May 14, 2020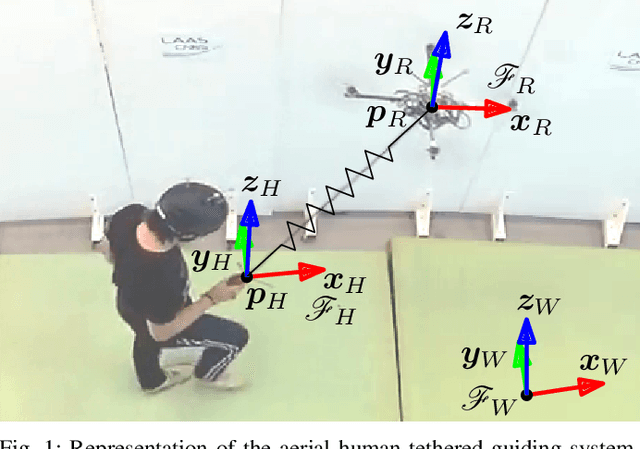
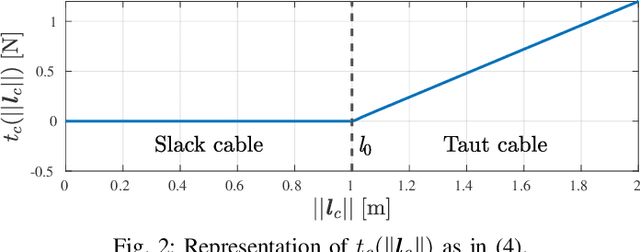
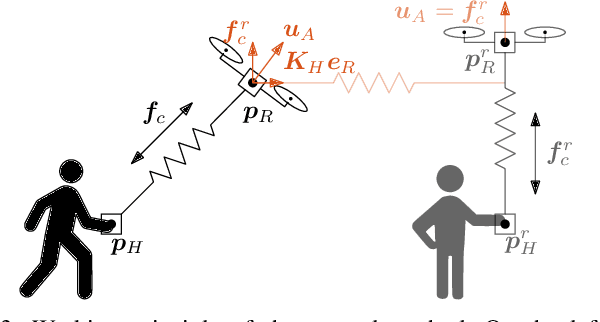
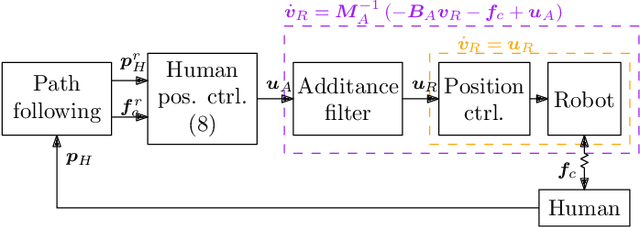
Today, physical Human-Robot Interaction (pHRI) is a very popular topic in the field of ground manipulation. At the same time, Aerial Physical Interaction (APhI) is also developing very fast. Nevertheless, pHRI with aerial vehicles has not been addressed so far. In this work, we present the study of one of the first systems in which a human is physically connected to an aerial vehicle by a cable. We want the robot to be able to pull the human toward a desired position (or along a path) only using forces as an indirect communication-channel. We propose an admittance-based approach that makes pHRI safe. A controller, inspired by the literature on flexible manipulators, computes the desired interaction forces that properly guide the human. The stability of the system is formally proved with a Lyapunov-based argument. The system is also shown to be passive, and thus robust to non-idealities like additional human forces, time-varying inputs, and other external disturbances. We also design a maneuver regulation policy to simplify the path following problem. The global method has been experimentally validated on a group of four subjects, showing a reliable and safe pHRI.