 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKolmogorov Arnold Networks and Multi-Layer Perceptrons: A Paradigm Shift in Neural Modelling
Jan 15, 2026The research undertakes a comprehensive comparative analysis of Kolmogorov-Arnold Networks (KAN) and Multi-Layer Perceptrons (MLP), highlighting their effectiveness in solving essential computational challenges like nonlinear function approximation, time-series prediction, and multivariate classification. Rooted in Kolmogorov's representation theorem, KANs utilize adaptive spline-based activation functions and grid-based structures, providing a transformative approach compared to traditional neural network frameworks. Utilizing a variety of datasets spanning mathematical function estimation (quadratic and cubic) to practical uses like predicting daily temperatures and categorizing wines, the proposed research thoroughly assesses model performance via accuracy measures like Mean Squared Error (MSE) and computational expense assessed through Floating Point Operations (FLOPs). The results indicate that KANs reliably exceed MLPs in every benchmark, attaining higher predictive accuracy with significantly reduced computational costs. Such an outcome highlights their ability to maintain a balance between computational efficiency and accuracy, rendering them especially beneficial in resource-limited and real-time operational environments. By elucidating the architectural and functional distinctions between KANs and MLPs, the paper provides a systematic framework for selecting the most suitable neural architectures for specific tasks. Furthermore, the proposed study highlights the transformative capabilities of KANs in progressing intelligent systems, influencing their use in situations that require both interpretability and computational efficiency.
Learning Skills from Demonstrations: A Trend from Motion Primitives to Experience Abstraction
Oct 14, 2022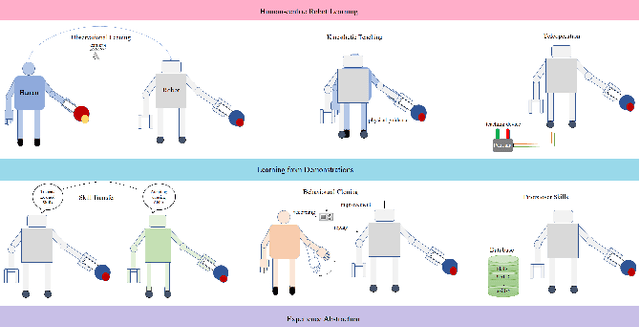
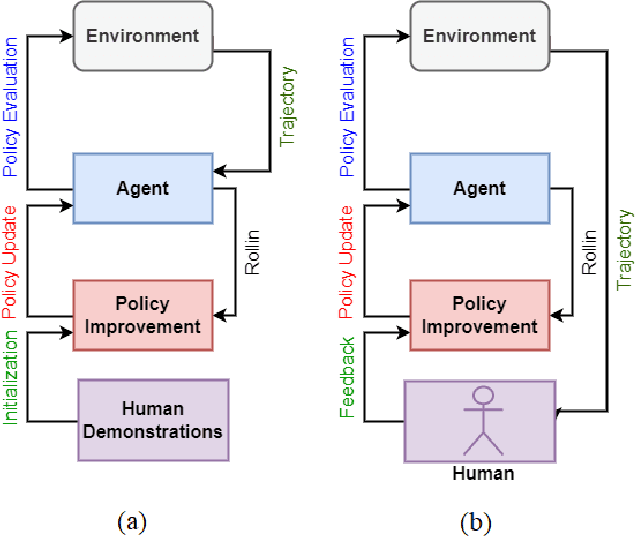
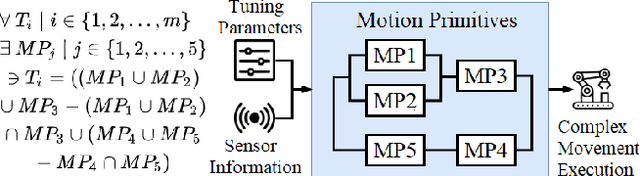

The uses of robots are changing from static environments in factories to encompass novel concepts such as Human-Robot Collaboration in unstructured settings. Pre-programming all the functionalities for robots becomes impractical, and hence, robots need to learn how to react to new events autonomously, just like humans. However, humans, unlike machines, are naturally skilled in responding to unexpected circumstances based on either experiences or observations. Hence, embedding such anthropoid behaviours into robots entails the development of neuro-cognitive models that emulate motor skills under a robot learning paradigm. Effective encoding of these skills is bound to the proper choice of tools and techniques. This paper studies different motion and behaviour learning methods ranging from Movement Primitives (MP) to Experience Abstraction (EA), applied to different robotic tasks. These methods are scrutinized and then experimentally benchmarked by reconstructing a standard pick-n-place task. Apart from providing a standard guideline for the selection of strategies and algorithms, this paper aims to draw a perspectives on their possible extensions and improvements
Fusing Visuo-Tactile Perception into Kernelized Synergies for Robust Grasping and Fine Manipulation of Non-rigid Objects
Sep 15, 2021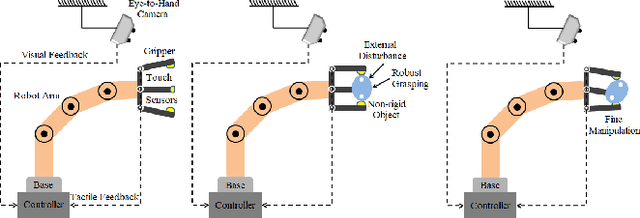
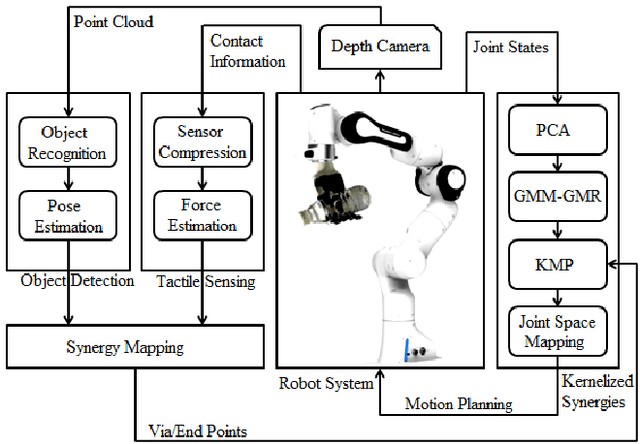
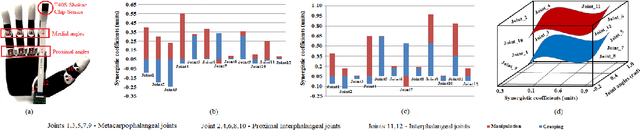
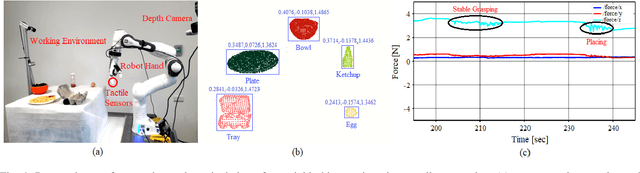
Handling non-rigid objects using robot hands necessities a framework that does not only incorporate human-level dexterity and cognition but also the multi-sensory information and system dynamics for robust and fine interactions. In this research, our previously developed kernelized synergies framework, inspired from human behaviour on reusing same subspace for grasping and manipulation, is augmented with visuo-tactile perception for autonomous and flexible adaptation to unknown objects. To detect objects and estimate their poses, a simplified visual pipeline using RANSAC algorithm with Euclidean clustering and SVM classifier is exploited. To modulate interaction efforts while grasping and manipulating non-rigid objects, the tactile feedback using T40S shokac chip sensor, generating 3D force information, is incorporated. Moreover, different kernel functions are examined in the kernelized synergies framework, to evaluate its performance and potential against task reproducibility, execution, generalization and synergistic re-usability. Experiments performed with robot arm-hand system validates the capability and usability of upgraded framework on stably grasping and dexterously manipulating the non-rigid objects.
Towards a Magnetically Actuated Laser Scanner for Endoscopic Microsurgeries
Nov 21, 2017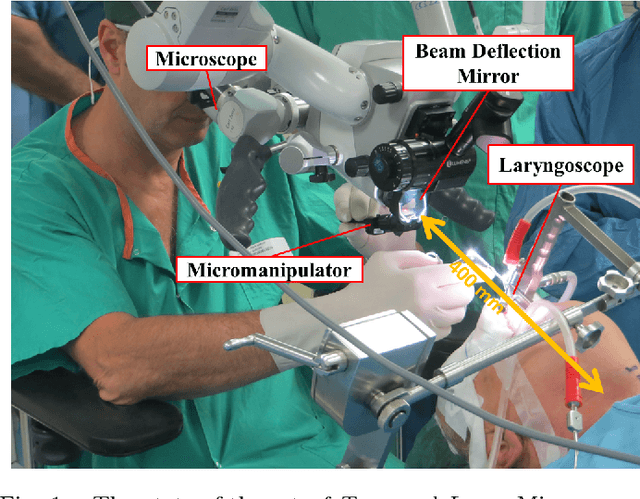
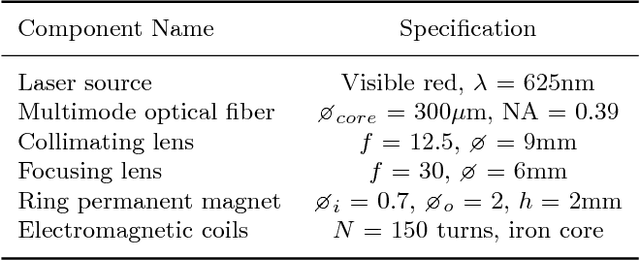
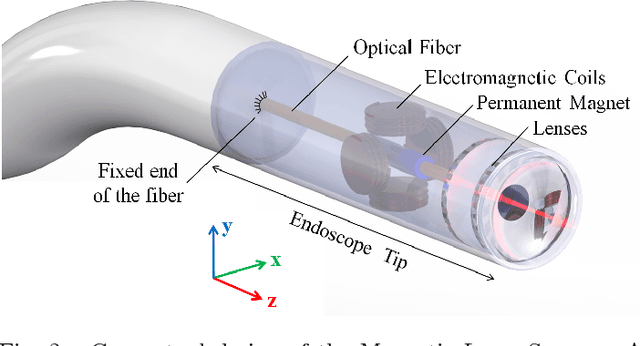
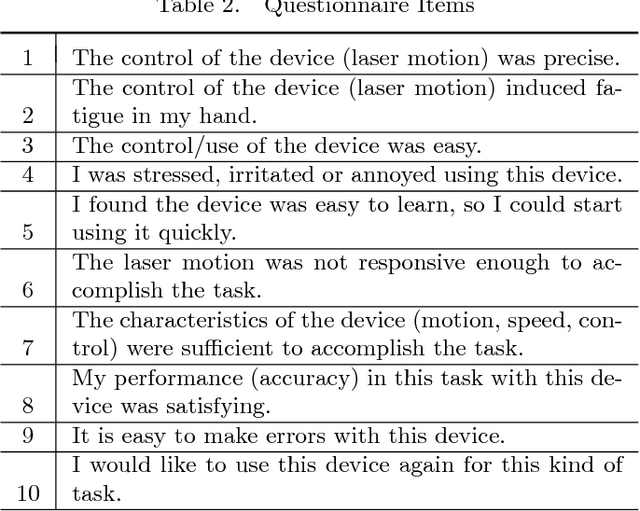
This article presents the design and assembly of a novel magnetically actuated endoscopic laser scanner device. The device is designed to perform 2D position control and high speed scanning of a fiber-based laser for operation in narrow workspaces. The device includes laser focusing optics to allow non-contact incisions and tablet-based control interface for intuitive teleoperation. The performance of the proof-of-concept device is analysed through controllability and the usability studies. The computer-controlled high-speed scanning demonstrates repeatable results with 21 um precision and a stable response up to 48 Hz. Teleoperation user trials, were performed for trajectory-following tasks with 12 subjects, show an accuracy of 39 um. The innovative design of the device can be applied to both surgical and diagnostic (imaging) applications in endoscopic systems.