 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Patient-Specific Deformable Registration in Laparoscopic Surgery
Apr 14, 2026Unsafe surgical care is a critical health concern, often linked to limitations in surgeon experience, skills, and situational awareness. Integrating patient-specific 3D models into the surgical field can enhance visualization, provide real-time anatomical guidance, and reduce intraoperative complications. However, reliably registering these models in general surgery remains challenging due to mismatches between preoperative and intraoperative organ surfaces, such as deformations and noise. To overcome these challenges, we introduce the first patient-specific non-rigid point cloud registration method, which leverages a novel data generation strategy to optimize outcomes for individual patients. Our approach combines a Transformer encoder-decoder architecture with overlap estimation and a dedicated matching module to predict dense correspondences, followed by a physics-based algorithm for registration. Experimental results on both synthetic and real data demonstrate that our patient-specific method significantly outperforms traditional agnostic approaches, achieving 45% Matching Score with 92% Inlier Ratio on synthetic data, highlighting its potential to improve surgical care.
Off-Axis Compliant RCM Joint with Near-Isotropic Stiffness and Minimal Parasitic Error
Mar 30, 2026This paper presents an off-axis, monolithic compliant Remote Center of Motion (RCM) joint for neuroendoscopic manipulation, combining near-isotropic stiffness with minimal parasitic motion. Based on the Tetra II concept, the end-effector is placed outside the tetrahedral flexure to improve line of sight, facilitate sterilization, and allow rapid tool release. Design proceeds in two stages: mobility panels are sized with a compliance-based isotropy objective, then constraining panels are synthesized through finite-element feasibility exploration to trade stiffness isotropy against RCM drift. The joint is modeled with beam elements and validated via detailed finite-element analyses, including fatigue-bounded stress constraints. A PA12 prototype is fabricated by selective laser sintering and characterized on a benchtop: a 2 N radial load is applied at the end-effector while a 6-DOF electromagnetic sensor records pose. The selected configuration produces a stiffness-ellipse principal axis ratio (PAR) of 1.37 and a parasitic-to-useful rotation ratio (PRR) of 0.63%. Under a 4.5° commanded rotation, the predicted RCM drift remains sub-millimetric (0.015-0.172 mm). Fatigue analysis predicts a usable rotational workspace of 12.1°-34.4° depending on direction. Experiments reproduce the simulated directional stiffness trend with typical deviations of 6-30%, demonstrating a compact, fabrication-ready RCM module for constrained surgical access.
Robotic Tele-Operation for Upper Aerodigestive Tract Microsurgery: System Design and Validation
Jan 13, 2026Upper aerodigestive tract (UADT) treatments frequently employ transoral laser microsurgery (TLM) for procedures such as the removal of tumors or polyps. In TLM, a laser beam is used to cut target tissue, while forceps are employed to grasp, manipulate, and stabilize tissue within the UADT. Although TLM systems may rely on different technologies and interfaces, forceps manipulation is still predominantly performed manually, introducing limitations in ergonomics, precision, and controllability. This paper proposes a novel robotic system for tissue manipulation in UADT procedures, based on a novel end-effector designed for forceps control. The system is integrated within a teleoperation framework that employs a robotic manipulator with a programmed remote center of motion (RCM), enabling precise and constrained instrument motion while improving surgeon ergonomics. The proposed approach is validated through two experimental studies and a dedicated usability evaluation, demonstrating its effectiveness and suitability for UADT surgical applications.
Clinically-guided Data Synthesis for Laryngeal Lesion Detection
Aug 08, 2025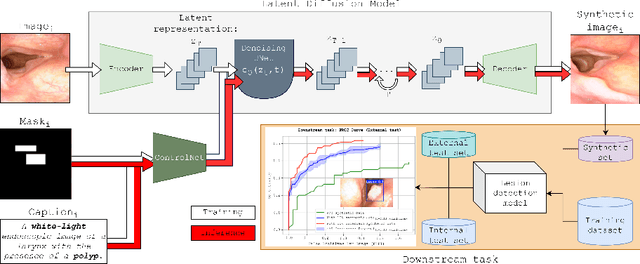
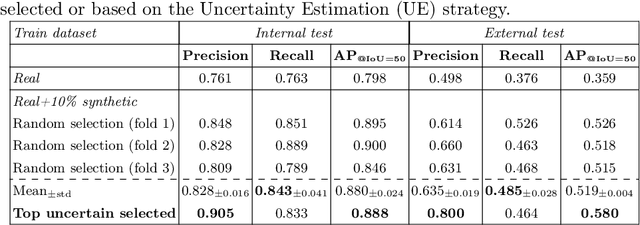
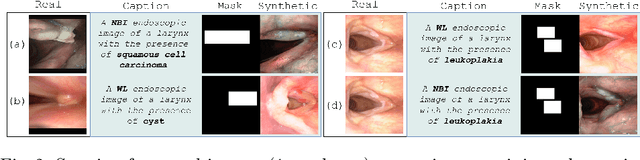
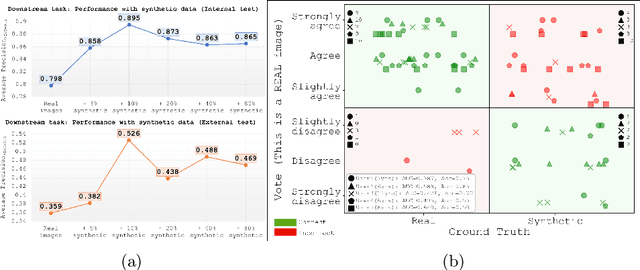
Although computer-aided diagnosis (CADx) and detection (CADe) systems have made significant progress in various medical domains, their application is still limited in specialized fields such as otorhinolaryngology. In the latter, current assessment methods heavily depend on operator expertise, and the high heterogeneity of lesions complicates diagnosis, with biopsy persisting as the gold standard despite its substantial costs and risks. A critical bottleneck for specialized endoscopic CADx/e systems is the lack of well-annotated datasets with sufficient variability for real-world generalization. This study introduces a novel approach that exploits a Latent Diffusion Model (LDM) coupled with a ControlNet adapter to generate laryngeal endoscopic image-annotation pairs, guided by clinical observations. The method addresses data scarcity by conditioning the diffusion process to produce realistic, high-quality, and clinically relevant image features that capture diverse anatomical conditions. The proposed approach can be leveraged to expand training datasets for CADx/e models, empowering the assessment process in laryngology. Indeed, during a downstream task of detection, the addition of only 10% synthetic data improved the detection rate of laryngeal lesions by 9% when the model was internally tested and 22.1% on out-of-domain external data. Additionally, the realism of the generated images was evaluated by asking 5 expert otorhinolaryngologists with varying expertise to rate their confidence in distinguishing synthetic from real images. This work has the potential to accelerate the development of automated tools for laryngeal disease diagnosis, offering a solution to data scarcity and demonstrating the applicability of synthetic data in real-world scenarios.
Surgical Neural Radiance Fields from One Image
Jul 01, 2025Purpose: Neural Radiance Fields (NeRF) offer exceptional capabilities for 3D reconstruction and view synthesis, yet their reliance on extensive multi-view data limits their application in surgical intraoperative settings where only limited data is available. In particular, collecting such extensive data intraoperatively is impractical due to time constraints. This work addresses this challenge by leveraging a single intraoperative image and preoperative data to train NeRF efficiently for surgical scenarios. Methods: We leverage preoperative MRI data to define the set of camera viewpoints and images needed for robust and unobstructed training. Intraoperatively, the appearance of the surgical image is transferred to the pre-constructed training set through neural style transfer, specifically combining WTC2 and STROTSS to prevent over-stylization. This process enables the creation of a dataset for instant and fast single-image NeRF training. Results: The method is evaluated with four clinical neurosurgical cases. Quantitative comparisons to NeRF models trained on real surgical microscope images demonstrate strong synthesis agreement, with similarity metrics indicating high reconstruction fidelity and stylistic alignment. When compared with ground truth, our method demonstrates high structural similarity, confirming good reconstruction quality and texture preservation. Conclusion: Our approach demonstrates the feasibility of single-image NeRF training in surgical settings, overcoming the limitations of traditional multi-view methods.
Compressive Image Scanning Microscope
Jul 19, 2023



We present a novel approach to implement compressive sensing in laser scanning microscopes (LSM), specifically in image scanning microscopy (ISM), using a single-photon avalanche diode (SPAD) array detector. Our method addresses two significant limitations in applying compressive sensing to LSM: the time to compute the sampling matrix and the quality of reconstructed images. We employ a fixed sampling strategy, skipping alternate rows and columns during data acquisition, which reduces the number of points scanned by a factor of four and eliminates the need to compute different sampling matrices. By exploiting the parallel images generated by the SPAD array, we improve the quality of the reconstructed compressive-ISM images compared to standard compressive confocal LSM images. Our results demonstrate the effectiveness of our approach in producing higher-quality images with reduced data acquisition time and potential benefits in reducing photobleaching.
Learning-Based Keypoint Registration for Fetoscopic Mosaicking
Jul 26, 2022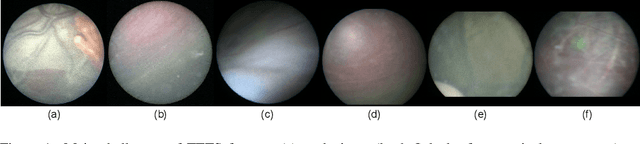
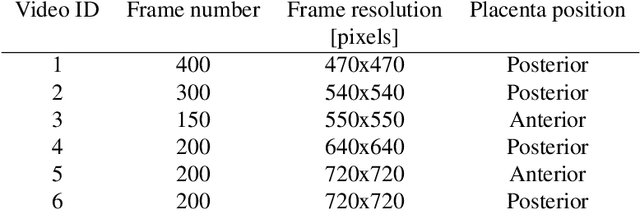
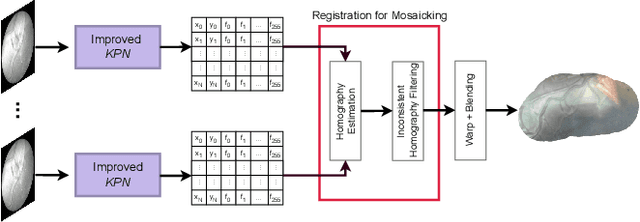
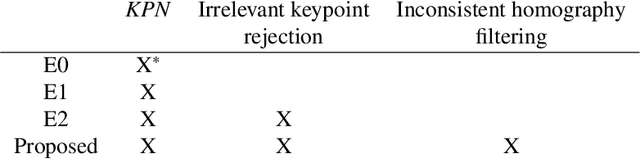
In Twin-to-Twin Transfusion Syndrome (TTTS), abnormal vascular anastomoses in the monochorionic placenta can produce uneven blood flow between the two fetuses. In the current practice, TTTS is treated surgically by closing abnormal anastomoses using laser ablation. This surgery is minimally invasive and relies on fetoscopy. Limited field of view makes anastomosis identification a challenging task for the surgeon. To tackle this challenge, we propose a learning-based framework for in-vivo fetoscopy frame registration for field-of-view expansion. The novelties of this framework relies on a learning-based keypoint proposal network and an encoding strategy to filter (i) irrelevant keypoints based on fetoscopic image segmentation and (ii) inconsistent homographies. We validate of our framework on a dataset of 6 intraoperative sequences from 6 TTTS surgeries from 6 different women against the most recent state of the art algorithm, which relies on the segmentation of placenta vessels. The proposed framework achieves higher performance compared to the state of the art, paving the way for robust mosaicking to provide surgeons with context awareness during TTTS surgery.
FetReg: Placental Vessel Segmentation and Registration in Fetoscopy Challenge Dataset
Jun 16, 2021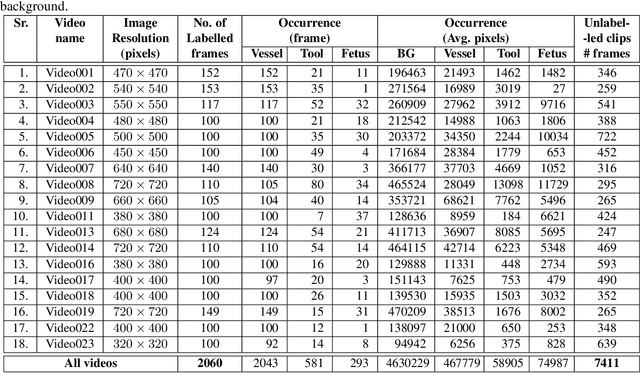
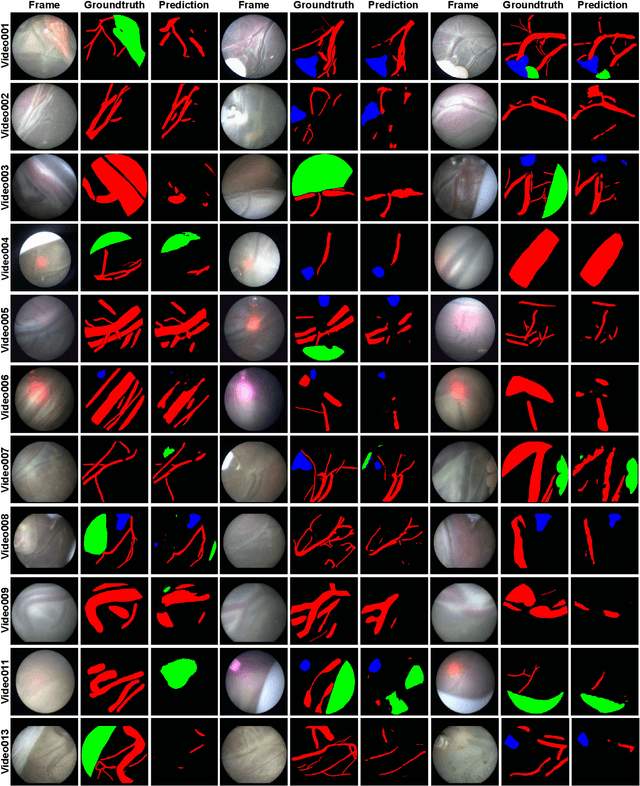
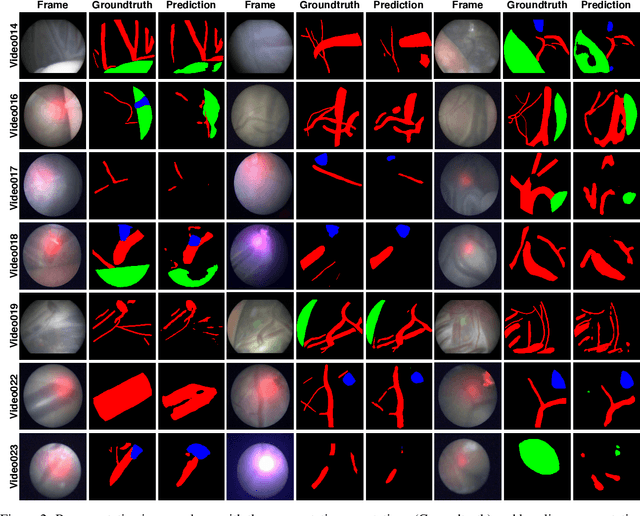
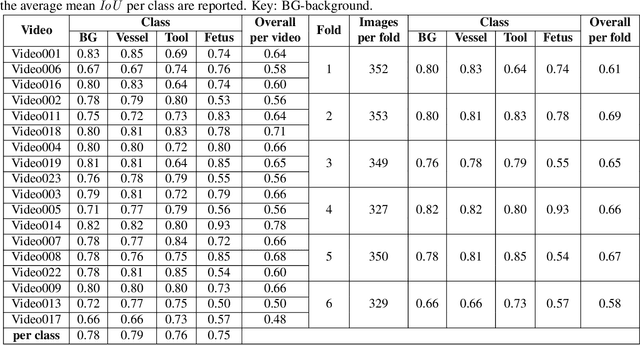
Fetoscopy laser photocoagulation is a widely used procedure for the treatment of Twin-to-Twin Transfusion Syndrome (TTTS), that occur in mono-chorionic multiple pregnancies due to placental vascular anastomoses. This procedure is particularly challenging due to limited field of view, poor manoeuvrability of the fetoscope, poor visibility due to fluid turbidity, variability in light source, and unusual position of the placenta. This may lead to increased procedural time and incomplete ablation, resulting in persistent TTTS. Computer-assisted intervention may help overcome these challenges by expanding the fetoscopic field of view through video mosaicking and providing better visualization of the vessel network. However, the research and development in this domain remain limited due to unavailability of high-quality data to encode the intra- and inter-procedure variability. Through the \textit{Fetoscopic Placental Vessel Segmentation and Registration (FetReg)} challenge, we present a large-scale multi-centre dataset for the development of generalized and robust semantic segmentation and video mosaicking algorithms for the fetal environment with a focus on creating drift-free mosaics from long duration fetoscopy videos. In this paper, we provide an overview of the FetReg dataset, challenge tasks, evaluation metrics and baseline methods for both segmentation and registration. Baseline methods results on the FetReg dataset shows that our dataset poses interesting challenges, offering large opportunity for the creation of novel methods and models through a community effort initiative guided by the FetReg challenge.
Towards a Magnetically Actuated Laser Scanner for Endoscopic Microsurgeries
Nov 21, 2017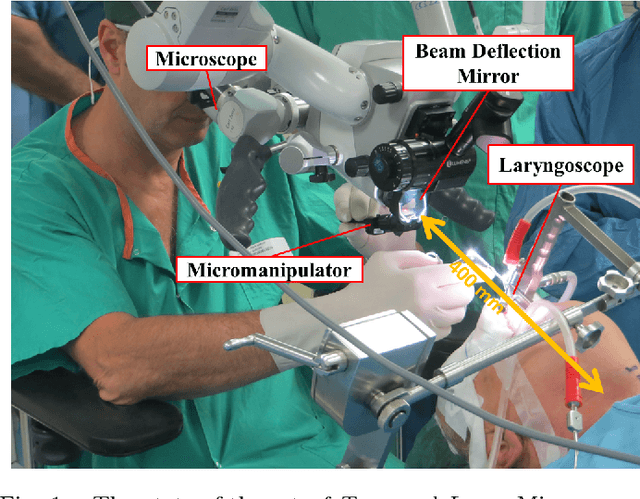
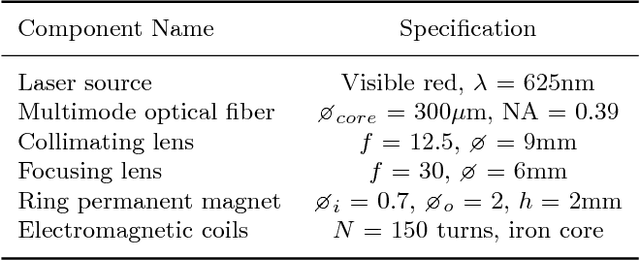
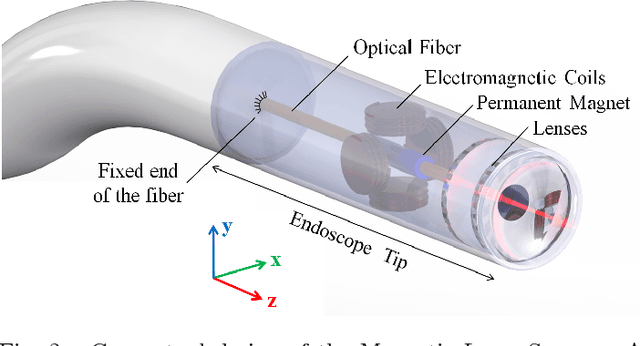
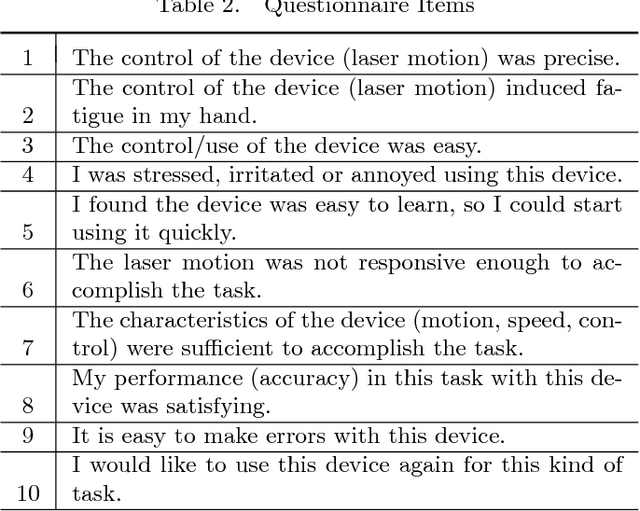
This article presents the design and assembly of a novel magnetically actuated endoscopic laser scanner device. The device is designed to perform 2D position control and high speed scanning of a fiber-based laser for operation in narrow workspaces. The device includes laser focusing optics to allow non-contact incisions and tablet-based control interface for intuitive teleoperation. The performance of the proof-of-concept device is analysed through controllability and the usability studies. The computer-controlled high-speed scanning demonstrates repeatable results with 21 um precision and a stable response up to 48 Hz. Teleoperation user trials, were performed for trajectory-following tasks with 12 subjects, show an accuracy of 39 um. The innovative design of the device can be applied to both surgical and diagnostic (imaging) applications in endoscopic systems.