 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressive Image Scanning Microscope
Jul 19, 2023



We present a novel approach to implement compressive sensing in laser scanning microscopes (LSM), specifically in image scanning microscopy (ISM), using a single-photon avalanche diode (SPAD) array detector. Our method addresses two significant limitations in applying compressive sensing to LSM: the time to compute the sampling matrix and the quality of reconstructed images. We employ a fixed sampling strategy, skipping alternate rows and columns during data acquisition, which reduces the number of points scanned by a factor of four and eliminates the need to compute different sampling matrices. By exploiting the parallel images generated by the SPAD array, we improve the quality of the reconstructed compressive-ISM images compared to standard compressive confocal LSM images. Our results demonstrate the effectiveness of our approach in producing higher-quality images with reduced data acquisition time and potential benefits in reducing photobleaching.
Design, Development and Experimental Realization of a Quadrupedal Research Platform: Stoch
Feb 27, 2019
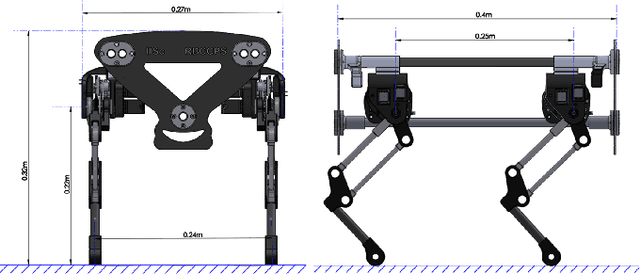
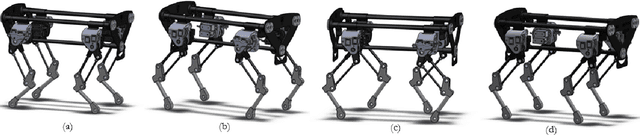
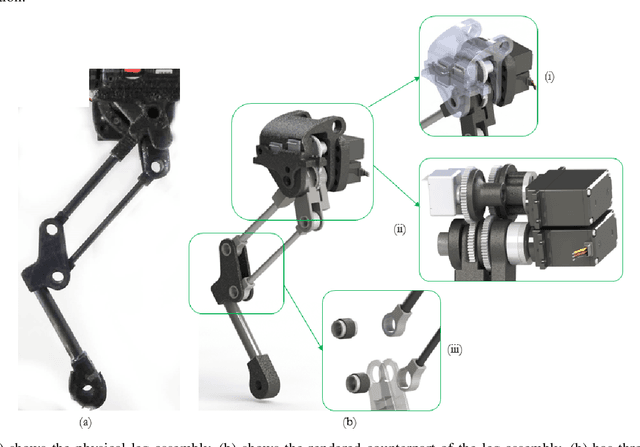
In this paper, we present a complete description of the hardware design and control architecture of our custom built quadruped robot, called the `Stoch'. Our goal is to realize a robust, modular, and a reliable quadrupedal platform, using which various locomotion behaviors are explored. This platform enables us to explore different research problems in legged locomotion, which use both traditional and learning based techniques. We discuss the merits and limitations of the platform in terms of exploitation of available behaviours, fast rapid prototyping, reproduction and repair. Towards the end, we will demonstrate trotting, bounding behaviors, and preliminary results in turning. In addition, we will also show various gait transitions i.e., trot-to-turn and trot-to-bound behaviors.