 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Quadrupedal Locomotion on Sloped Terrains: A Linear Policy Approach
Nov 10, 2020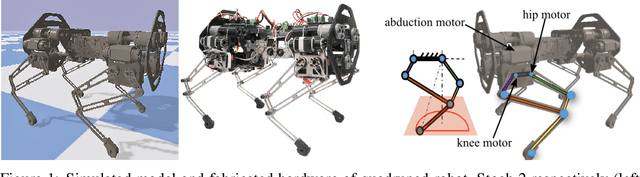
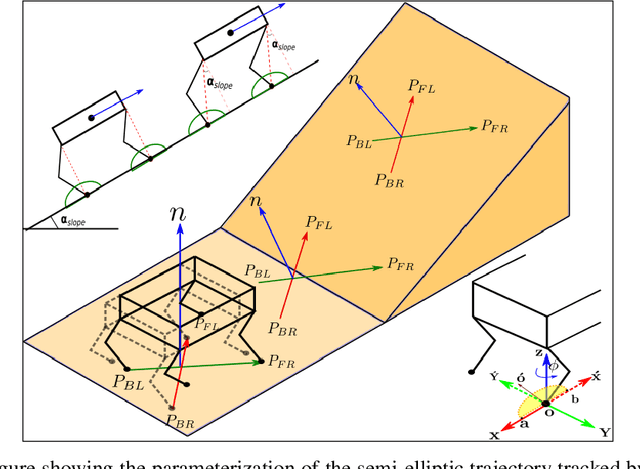
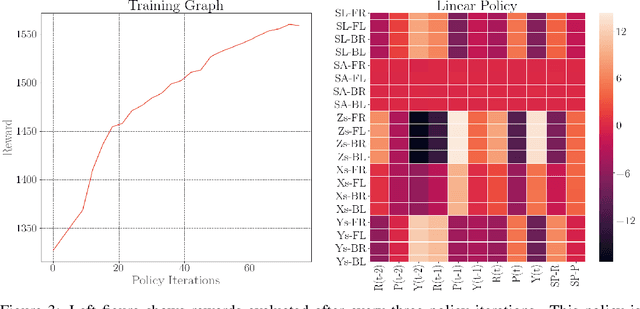
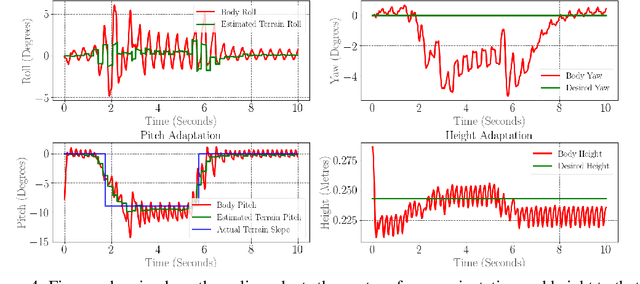
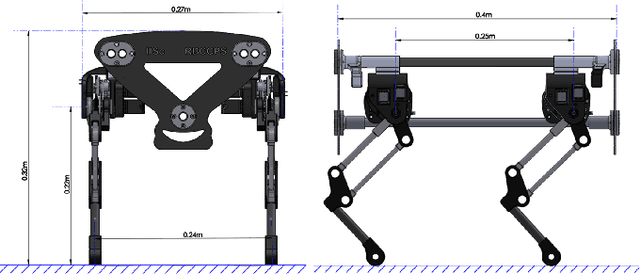
In this paper, with a view toward fast deployment of locomotion gaits in low-cost hardware, we use a linear policy for realizing end-foot trajectories in the quadruped robot, Stoch $2$. In particular, the parameters of the end-foot trajectories are shaped via a linear feedback policy that takes the torso orientation and the terrain slope as inputs. The corresponding desired joint angles are obtained via an inverse kinematics solver and tracked via a PID control law. Augmented Random Search, a model-free and a gradient-free learning algorithm is used to train this linear policy. Simulation results show that the resulting walking is robust to terrain slope variations and external pushes. This methodology is not only computationally light-weight but also uses minimal sensing and actuation capabilities in the robot, thereby justifying the approach.
Learning Stable Manoeuvres in Quadruped Robots from Expert Demonstrations
Jul 28, 2020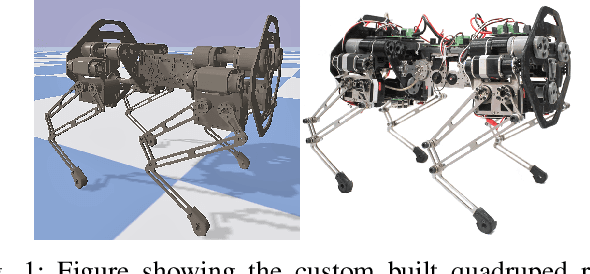
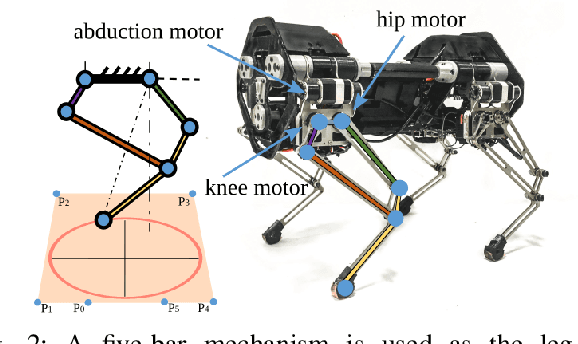
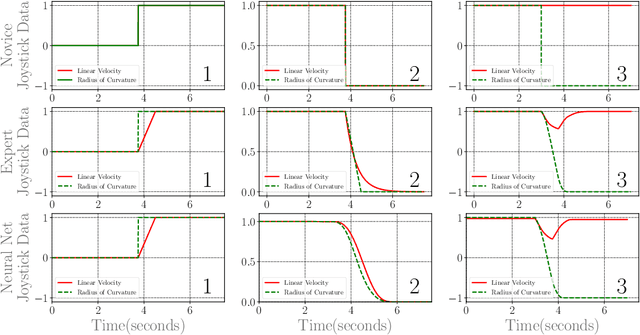
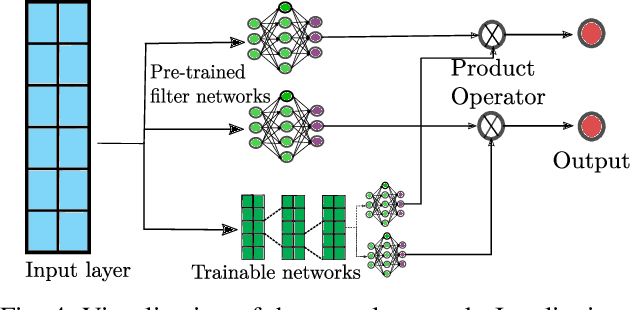
With the research into development of quadruped robots picking up pace, learning based techniques are being explored for developing locomotion controllers for such robots. A key problem is to generate leg trajectories for continuously varying target linear and angular velocities, in a stable manner. In this paper, we propose a two pronged approach to address this problem. First, multiple simpler policies are trained to generate trajectories for a discrete set of target velocities and turning radius. These policies are then augmented using a higher level neural network for handling the transition between the learned trajectories. Specifically, we develop a neural network-based filter that takes in target velocity, radius and transforms them into new commands that enable smooth transitions to the new trajectory. This transformation is achieved by learning from expert demonstrations. An application of this is the transformation of a novice user's input into an expert user's input, thereby ensuring stable manoeuvres regardless of the user's experience. Training our proposed architecture requires much less expert demonstrations compared to standard neural network architectures. Finally, we demonstrate experimentally these results in the in-house quadruped Stoch 2.
3D printed cable-driven continuum robots with generally routed cables: modeling and experiments
Mar 10, 2020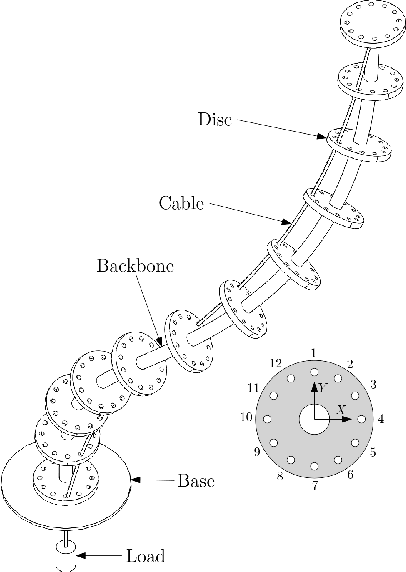
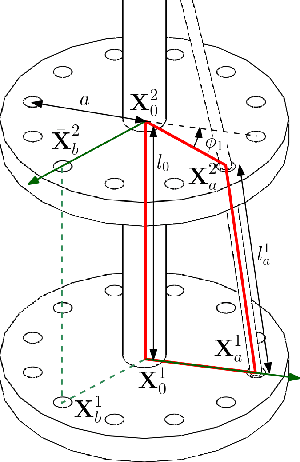
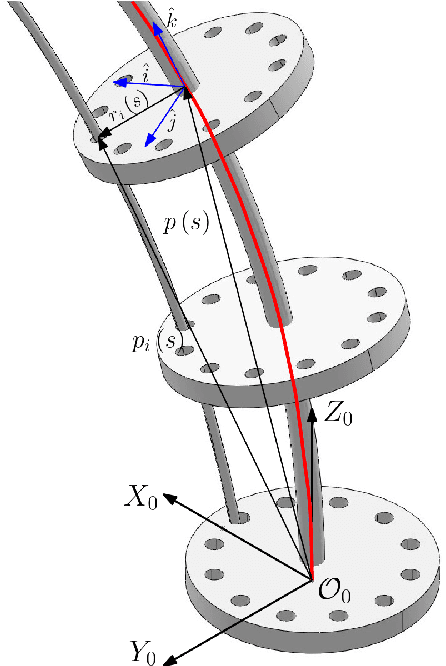
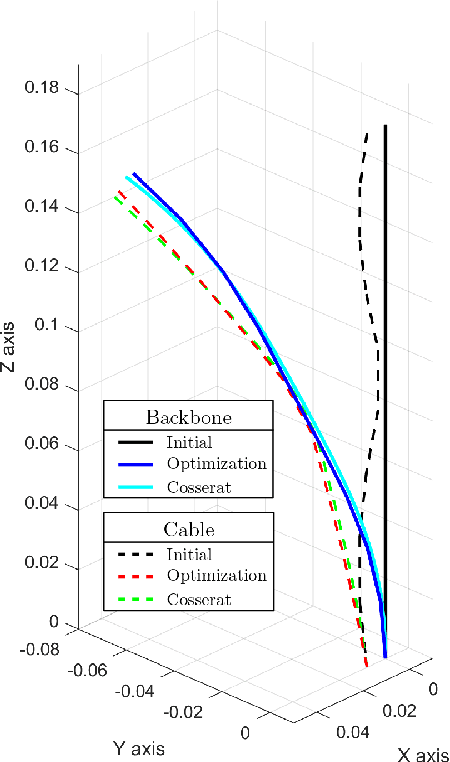
Continuum robots are becoming increasingly popular for applications which require the robots to deform and change shape, while also being compliant. A cable-driven continuum robot is one of the most commonly used type. Typical cable driven continuum robots consist of a flexible backbone with spacer disks attached to the backbone and cables passing through the holes in the spacer disks from the fixed base to a free end. In most such robots, the routing of the cables are straight or a smooth helical curve. In this paper, we analyze the experimental and theoretical deformations of a 3D printed continuum robot, for 6 different kinds of cable routings. The results are compared for discrete optimization based kinematic modelling as well as static modelling using Cosserat rod theory. It is shown that the experimental results match the theoretical results with an error margin of 2%. It is also shown that the optimization based approach is faster than the one based on Cosserat rod theory. We also present a three-fingered gripper prototype where each of the fingers are 3D printed continuum robots with general cable routing. It is demonstrated that the prototype can be used for gripping objects and for its manipulation.
Gait Library Synthesis for Quadruped Robots via Augmented Random Search
Dec 30, 2019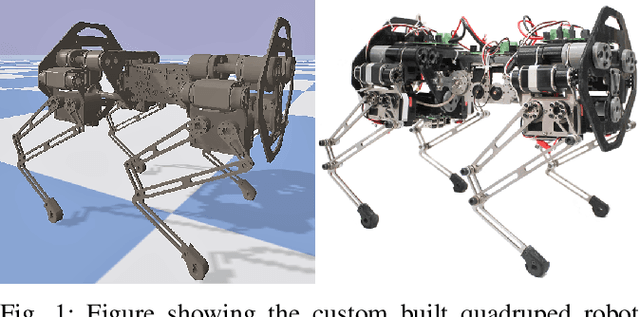
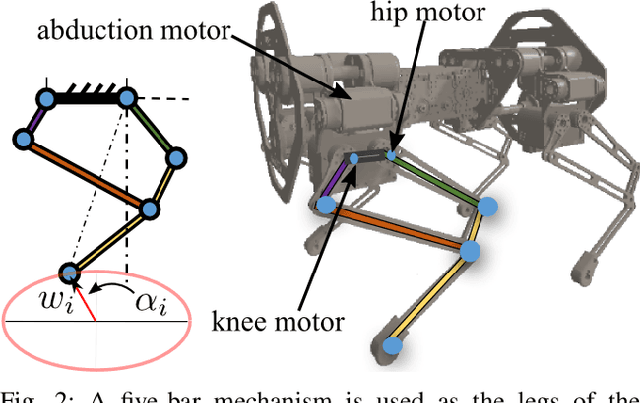
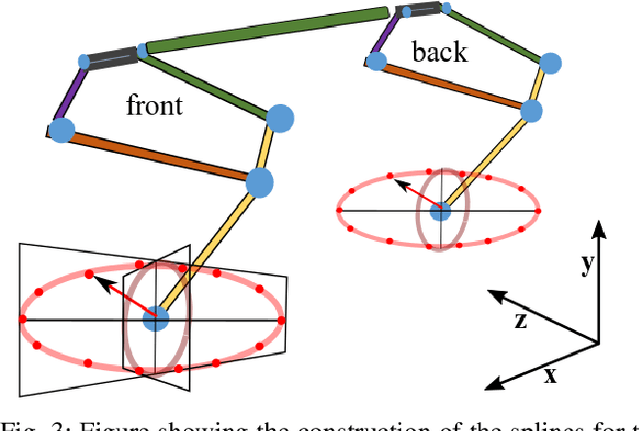
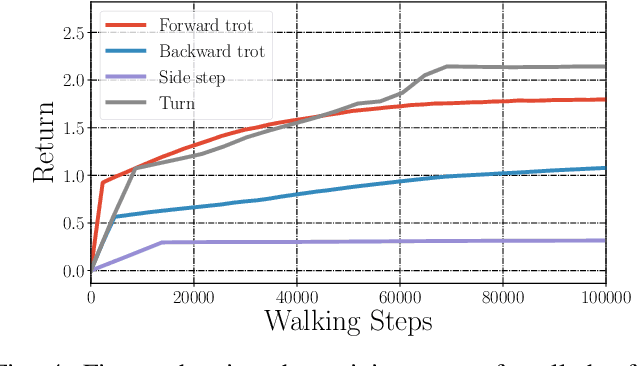
In this paper, with a view toward fast deployment of learned locomotion gaits in low-cost hardware, we generate a library of walking trajectories, namely, forward trot, backward trot, side-step, and turn in our custom-built quadruped robot, Stoch 2, using reinforcement learning. There are existing approaches that determine optimal policies for each time step, whereas we determine an optimal policy, in the form of end-foot trajectories, for each half walking step i.e., swing phase and stance phase. The way-points for the foot trajectories are obtained from a linear policy, i.e., a linear function of the states of the robot, and cubic splines are used to interpolate between these points. Augmented Random Search, a model-free and gradient-free learning algorithm is used to learn the policy in simulation. This learned policy is then deployed on hardware, yielding a trajectory in every half walking step. Different locomotion patterns are learned in simulation by enforcing a preconfigured phase shift between the trajectories of different legs. The transition from one gait to another is achieved by using a low-pass filter for the phase, and the sim-to-real transfer is improved by a linear transformation of the states obtained through regression.
Learning Active Spine Behaviors for Dynamic and Efficient Locomotion in Quadruped Robots
May 16, 2019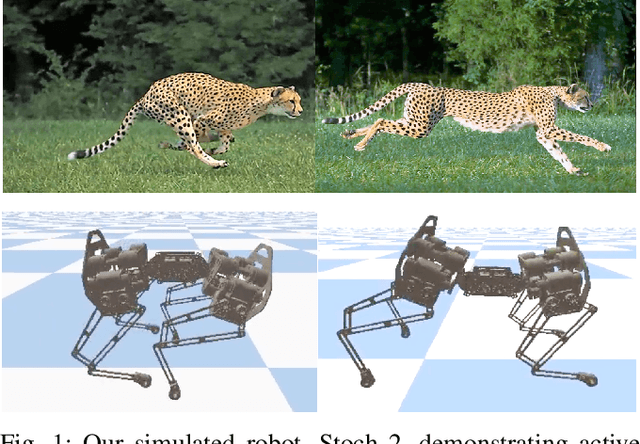
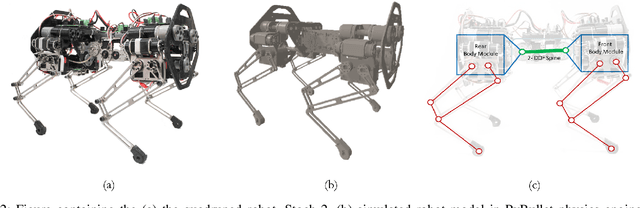
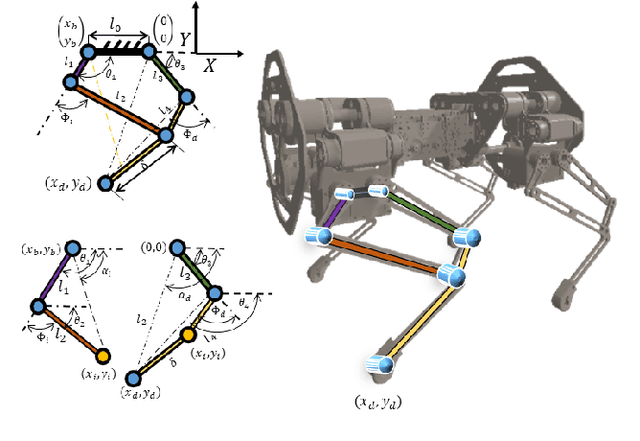
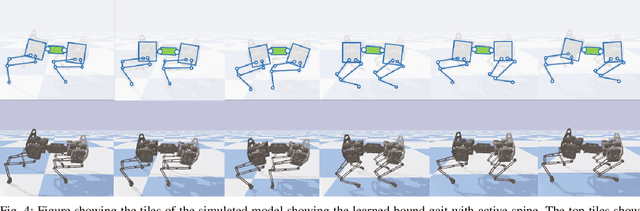
In this work, we provide a simulation framework to perform systematic studies on the effects of spinal joint compliance and actuation on bounding performance of a 16-DOF quadruped spined robot Stoch 2. Fast quadrupedal locomotion with active spine is an extremely hard problem, and involves a complex coordination between the various degrees of freedom. Therefore, past attempts at addressing this problem have not seen much success. Deep-Reinforcement Learning seems to be a promising approach, after its recent success in a variety of robot platforms, and the goal of this paper is to use this approach to realize the aforementioned behaviors. With this learning framework, the robot reached a bounding speed of 2.1 m/s with a maximum Froude number of 2. Simulation results also show that use of active spine, indeed, increased the stride length, improved the cost of transport, and also reduced the natural frequency to more realistic values.
Design, Development and Experimental Realization of a Quadrupedal Research Platform: Stoch
Feb 27, 2019
In this paper, we present a complete description of the hardware design and control architecture of our custom built quadruped robot, called the `Stoch'. Our goal is to realize a robust, modular, and a reliable quadrupedal platform, using which various locomotion behaviors are explored. This platform enables us to explore different research problems in legged locomotion, which use both traditional and learning based techniques. We discuss the merits and limitations of the platform in terms of exploitation of available behaviours, fast rapid prototyping, reproduction and repair. Towards the end, we will demonstrate trotting, bounding behaviors, and preliminary results in turning. In addition, we will also show various gait transitions i.e., trot-to-turn and trot-to-bound behaviors.
Realizing Learned Quadruped Locomotion Behaviors through Kinematic Motion Primitives
Feb 26, 2019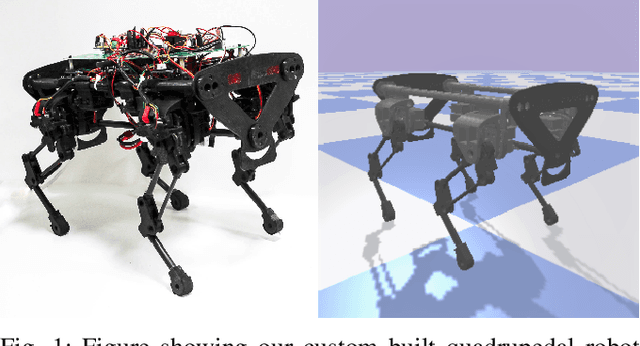
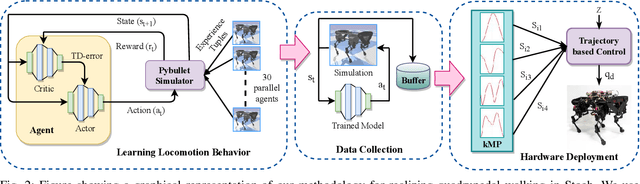
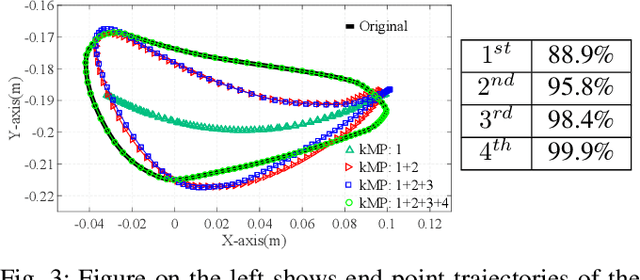
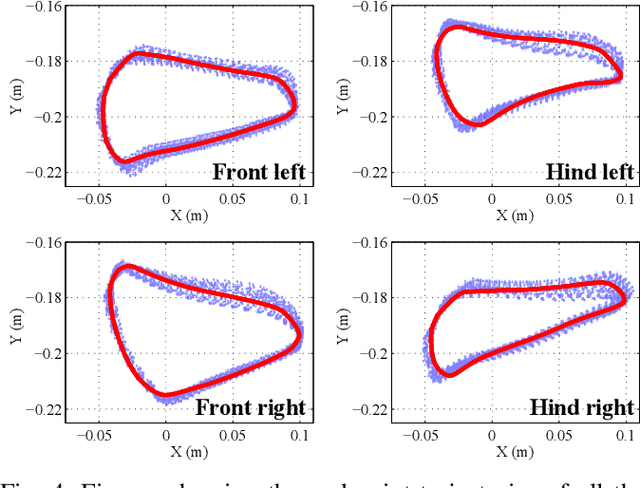
Humans and animals are believed to use a very minimal set of trajectories to perform a wide variety of tasks including walking. Our main objective in this paper is two fold 1) Obtain an effective tool to realize these basic motion patterns for quadrupedal walking, called the kinematic motion primitives (kMPs), via trajectories learned from deep reinforcement learning (D-RL) and 2) Realize a set of behaviors, namely trot, walk, gallop and bound from these kinematic motion primitives in our custom four legged robot, called the `Stoch'. D-RL is a data driven approach, which has been shown to be very effective for realizing all kinds of robust locomotion behaviors, both in simulation and in experiment. On the other hand, kMPs are known to capture the underlying structure of walking and yield a set of derived behaviors. We first generate walking gaits from D-RL, which uses policy gradient based approaches. We then analyze the resulting walking by using principal component analysis. We observe that the kMPs extracted from PCA followed a similar pattern irrespective of the type of gaits generated. Leveraging on this underlying structure, we then realize walking in Stoch by a straightforward reconstruction of joint trajectories from kMPs. This type of methodology improves the transferability of these gaits to real hardware, lowers the computational overhead on-board, and also avoids multiple training iterations by generating a set of derived behaviors from a single learned gait.